






 本文探讨了自抗扰控制如何通过控制与估计的融合来处理不确定性、内外扰动和非线性系统,介绍了其核心组件——扩张状态观测器,以及在电机控制、航空航天等多个领域的应用实例。同时,文章还列举了其他控制策略中控制与估计的融合案例,展示了现代控制理论的多元化应用。
本文探讨了自抗扰控制如何通过控制与估计的融合来处理不确定性、内外扰动和非线性系统,介绍了其核心组件——扩张状态观测器,以及在电机控制、航空航天等多个领域的应用实例。同时,文章还列举了其他控制策略中控制与估计的融合案例,展示了现代控制理论的多元化应用。
一、自抗扰控制—控制与估计融合
控制理论中的控制与估计是互为对偶的概念,二者在系统控制过程中相辅相成,共同实现了对系统状态的精确管理和优化控制。自抗扰控制(Adaptive Disturbance Rejection Control, ADRC)技术是将控制与估计巧妙融合的一个实例,它在处理不确定性、内外扰动以及非线性系统时表现出优异的性能。
在自抗扰控制中,控制与估计的融合主要体现在以下几个方面:
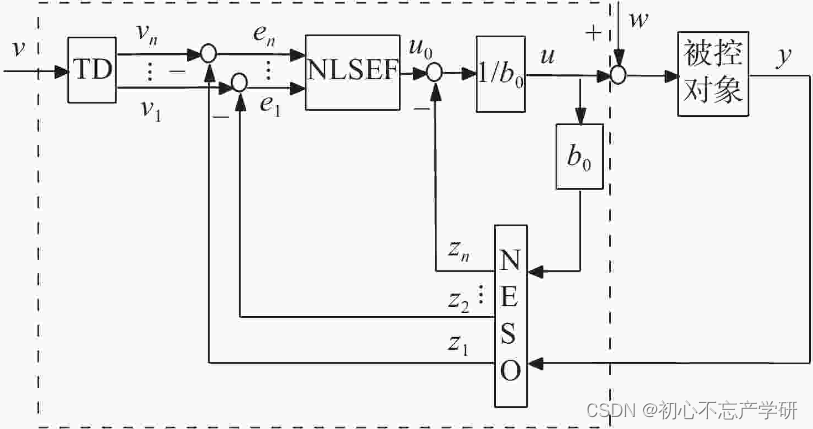
扩张状态观测器(Extended State Observer, ESO):
ESO是自抗扰控制中实现估计功能的核心组件。它不仅估计系统的状态变量,还能实时估计和补偿系统中的未知干扰和非线性因素。通过设计合适的观测器增益,可以快速且准确地观测到系统的内在状态和外在扰动。
总体扰动估计:
在自抗扰控制中,所有未建模动态和已知/未知的外部扰动都被视为一个“总体扰动”。ESO通过实时估计这个“总体扰动”,并将估计值反馈到控制系统中,实现了对扰动的在线补偿。
反馈控制律设计:
控制律的设计包含了对估计值的充分利用。一旦EHO估计出扰动量,控制器会根据此估计值动态调整控制输入,确保系统能够在扰动影响下依然稳定并接近预定的控制目标。
控制与估计的动态耦合:
在自抗扰控制框架下,控制律与观测器设计是紧密耦合的。控制器不断根据观测器提供的扰动估计值调整控制输出,而观测器则根据系统响应调整其对扰动的估计,形成了闭环的控制与估计联动机制。
总结来说,在自抗扰控制中,控制与估计通过广义状态观测器有机地结合起来,实现了对系统动态特性、内外扰动的实时监测与精确控制,有效提升了系统对不确定性和复杂条件的适应能力,确保了系统的稳定性和性能优化。这种融合体现了控制理论中控制与估计对偶性思想的具体应用,也是现代控制理论在实际工程中极具实用价值的体现。
此图片来源于网络
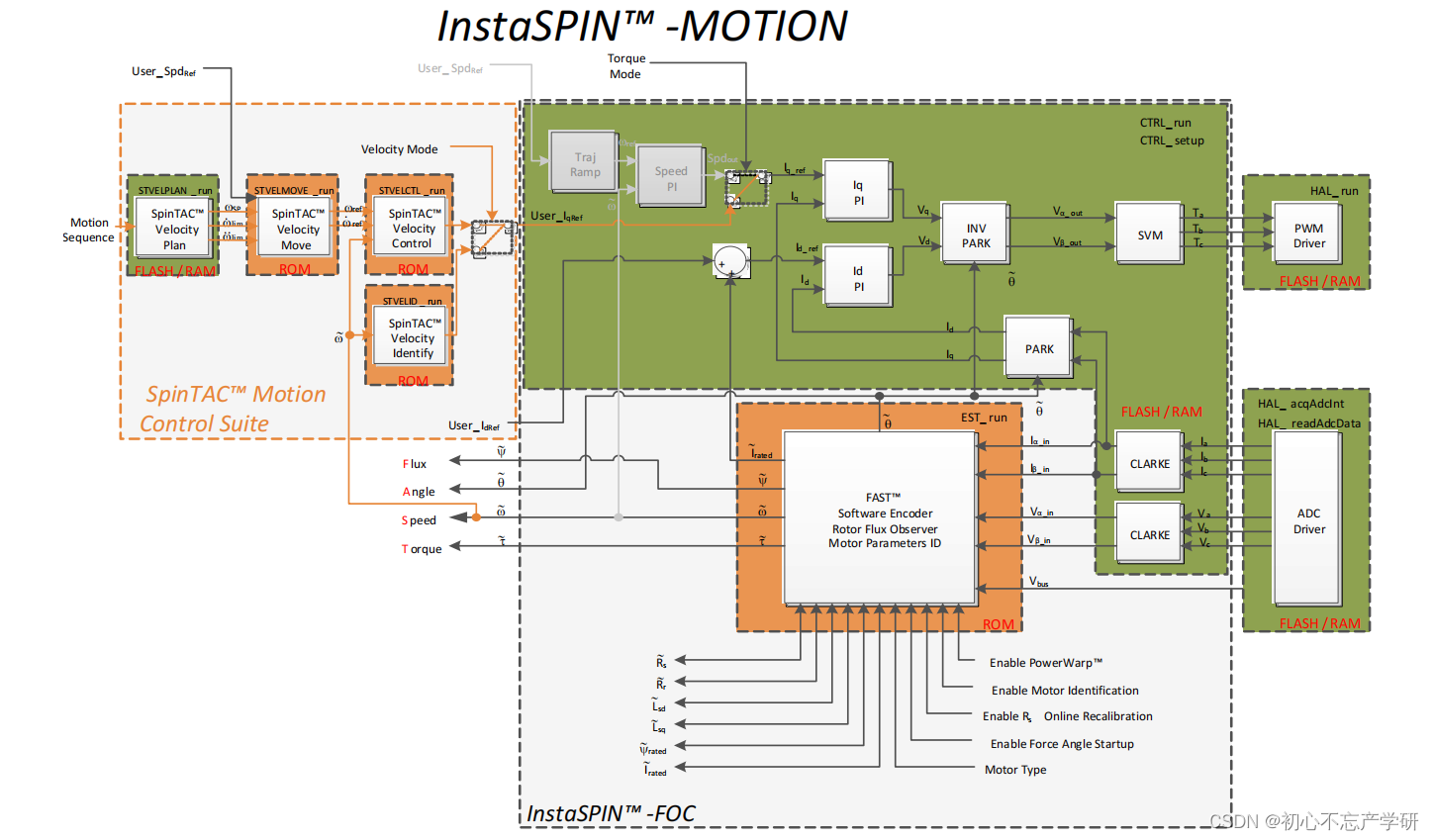
二、自抗扰控制—已有的商用案例
德州仪器(TI)推出的针对电机控制的解决方案 InstaSPIN-MOTION 是TI针对单/双有刷直流电机、永磁同步电机(PMSM)和交流感应电机(ACIM)设计的高级电机控制解决方案。它内建了包括快速启动、稳定旋转、精确速度和位置控制在内的多种功能,其中便采用了自抗扰控制器技术,以提高系统的稳定性和抗扰动性能,简化了电机控制系统的开发过程。其中 SpinTAC 是TI的一款高级运动控制解决方案,主要针对伺服驱动器和工业自动化应用。SpinTAC技术集合了包括速度、位置和转矩控制在内的多种高级控制算法,其中也利用了自抗扰控制器的思想,以实现对复杂动态系统扰动的快速抵消,确保电机在苛刻的工业环境下也能保持优良的控制性能。
自抗扰控制(Adaptive Disturbance Rejection Control, ADRC)自提出以来,在多个行业中已经得到了广泛的应用和产品化商用成果,以下是一些典型的例子:
-
航空航天:自抗扰控制已被应用于飞行控制、姿态控制、卫星推进系统等,通过抑制内外部干扰,提高飞行器的稳定性和控制精度。
-
电力系统与电力电子:在变频器、UPS、风电变流器、光伏逆变器等领域,自抗扰控制用于提高系统的动态响应速度、稳定性和抗扰动能力。
-
机器人与自动化装备:在工业机器人、伺服驱动器、AGV小车、精密运动控制等场合,自抗扰控制技术提高了系统的跟踪精度和抗外界扰动的能力。
-
车辆控制:自动驾驶车辆的悬挂系统、电动车辆的动力系统中,自抗扰控制用于改善驾驶舒适性和行驶稳定性。
-
化工过程控制:在石油化工、冶金、制药等行业,自抗扰控制应用于复杂化学反应过程的控制,提高了过程的稳定性和节能效果。
-
机械设备:如高速高精度数控机床、大型机械设备等,自抗扰控制技术能够提高系统的动态性能和精度。
发展方向:
-
理论研究深化:进一步研究自抗扰控制器的数学模型,优化控制器设计方法,如改进扩展状态观测器的设计,增强对非线性、不确定性和大时滞系统的适应性。
-
复杂系统应用:针对更复杂的多变量、分布式、网络化系统,研究和应用自抗扰控制技术,提高系统的整体性能和可靠性。
-
融合其他控制策略:与模糊逻辑控制、神经网络控制、滑模控制等智能控制方法结合,发展复合型自抗扰控制策略,以应对更复杂和多样化的控制需求。
-
硬件实现与产业化:将自抗扰控制算法嵌入到芯片或控制器中,实现小型化、低成本、高集成度的商业产品,推动其在更多工业现场的广泛应用。
-
智能优化与自主学习:结合机器学习、深度学习等先进技术,研究自抗扰控制器的自适应优化和在线学习能力,以适应系统特性的变化和未知扰动。
-
安全性和容错性:在自抗扰控制设计中考虑安全性约束和故障诊断功能,提高系统的鲁棒性和容错能力,保障在极端条件下的正常运行。
此图片来源于网络
三、控制与估计完美融合其他例子
除了自抗扰控制(ADRC)外,控制与估计在多个先进控制策略中都有深度融合的例子,以下是一些其他的控制与估计完美融合的控制方案:
模型预测控制(Model Predictive Control, MPC)与在线辨识
在MPC中,系统模型的准确性直接影响控制性能。通过在线估计技术(如递推最小二乘法、卡尔曼滤波等)实时更新模型参数,可以提高模型预测的精确度,从而增强控制效果。
滑模观测器与滑模控制
滑模观测器不仅可以用来估计系统的状态,而且能够很好地估计和抑制不确定性扰动。结合滑模控制策略,观测器估计的扰动信号可以实时反馈到控制器中,形成滑模观测器-控制器一体化设计,实现对系统的稳定控制。
H∞观测器与H∞控制
H∞观测器设计用于估计系统状态并抑制噪声和干扰。与H∞控制结合时,观测器估计的状态信息用于设计鲁棒控制器,以保证在存在外部扰动和模型不确定性时系统仍有良好的性能。
卡尔曼滤波与最优控制
卡尔曼滤波是一种经典的状态估计技术,它可以与最优控制理论相结合,例如在航天器轨道控制中,卡尔曼滤波用于精确估计航天器的位置和速度状态,最优控制则根据这些估计值制定最优控制策略。
自适应控制与参数估计
自适应控制技术旨在根据系统参数的变化动态调整控制律,这里的参数估计就是其核心组成部分。通过在线估计和辨识系统的未知参数,自适应控制器能够实时适应系统的变化,实现对系统的精确控制。
模糊逻辑控制与模糊推理估计
在模糊逻辑控制中,模糊推理可以用来估计系统的模糊状态,并根据这些估计值来设计和调整模糊控制规则,实现对复杂、非线性系统的控制。
深度学习控制与神经网络状态估计
利用深度神经网络进行系统状态的实时估计,结合深度强化学习或监督学习等方法设计控制器,使得控制算法能够基于实时估计的状态信息做出智能决策,以应对高度非线性和复杂动态环境。
这些控制与估计融合的方案都是在不断发展的现代控制理论中,为了应对系统复杂性、不确定性、非线性等挑战而发展起来的先进控制策略。


















 6145
6145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











