






永磁同步电机基于超螺旋滑模观测器的内置式永磁同步电机ipmsm无位置(速度)传感器控制模型全新
dq旋转坐标系建立滑模观测器
引入二阶滑模超螺旋算法替代一阶滑模
引入锁相环PLL估计转速及转子位置
YID:9260665776660623
盲生与华点
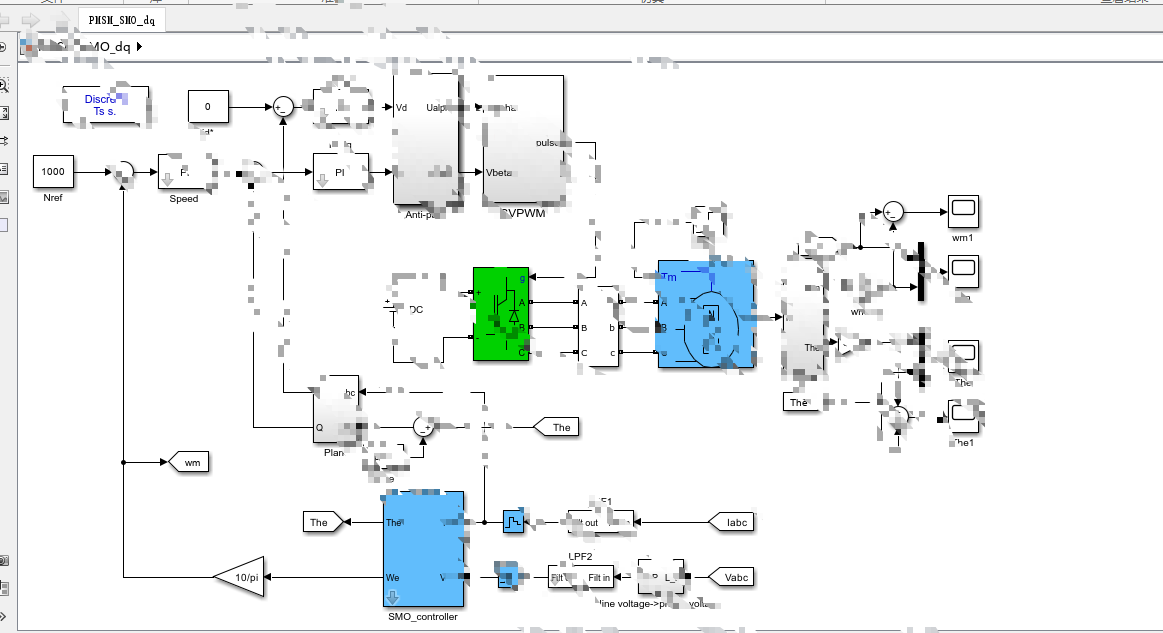
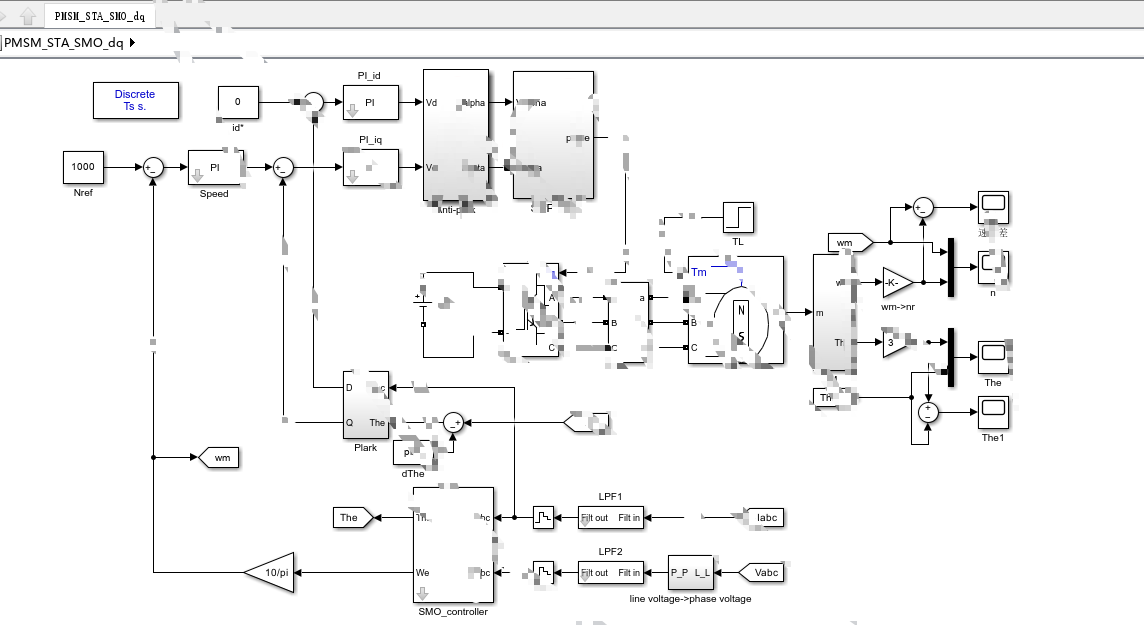
基于两种坐标系的超螺旋滑模观测器的永磁同步电机(PMSM)无位置(速度)传感器控制模型
摘要:本文介绍了一种基于两种坐标系的超螺旋滑模观测器的永磁同步电机无位置(速度)传感器控制模型。该模型采用dq旋转坐标系和静止坐标系建立超螺旋滑模观测器(SMO),并引入二阶滑模超螺旋算法替代传统的一阶滑模方法。同时,通过引入锁相环(PLL)估计转速及转子位置,有效削弱控制过程中的抖振。最后,本文还赠送了超螺旋滑模搭建推导文档及相关参考资料,并提供了仿真模型的实现。
关键词:超螺旋滑模观测器;永磁同步电机;无位置传感器;dq旋转坐标系;静止坐标系;二阶滑模超螺旋算法;锁相环;转速估计;转子位置估计;抖振
-
引言
永磁同步电机(PMSM)作为一种高效能、高响应性能的电机,广泛应用于工业生产和家用电器中。传统的PMSM控制方法需要使用位置或速度传感器来获取准确的转子位置信息,但传感器的安装和维护成本较高。因此,研究开发一种无位置(速度)传感器的PMSM控制方法具有重要意义。 -
基于超螺旋滑模观测器的控制模型
2.1 dq旋转坐标系和静止坐标系
传统的PMSM控制中使用dq旋转坐标系和静止坐标系进行坐标变换和电机参数建模。dq旋转坐标系具有周期性转动的特点,能够准确描述转子位置和速度。静止坐标系作为dq坐标系的参考系,用于描述电机的静态特性。
2.2 超螺旋滑模观测器(SMO)
传统的PMSM控制中使用滑模观测器来估计转子位置和速度。然而,传统的一阶滑模方法存在震荡问题。为了改进这一问题,本文引入了二阶滑模超螺旋算法。该算法通过增加一个滤波器和一个积分器来改善控制性能,使得估计值更加准确和稳定。
-
PLL估计转速及转子位置
为了进一步提高控制性能,本文引入了锁相环(PLL)来估计转速及转子位置。PLL通过比较电机输出信号和参考信号的相位差来实现转速及转子位置的估计。通过引入PLL,可以减少传感器的使用,减小了系统成本,并提高了控制精度。 -
有效削弱抖振
在PMSM控制过程中,常常会出现抖振的问题。为了解决这一问题,本文采用了超螺旋滑模观测器和PLL的组合控制方法。通过调节超螺旋滑模参数和PLL参数,可以有效削弱抖振现象,提高系统的稳定性和控制精度。 -
结论
本文介绍了一种基于两种坐标系的超螺旋滑模观测器的永磁同步电机无位置(速度)传感器控制模型。通过引入二阶滑模超螺旋算法和PLL估计转速及转子位置,有效削弱了控制过程中的抖振现象,提高了系统的性能和控制精度。本文还提供了超螺旋滑模搭建推导文档及相关参考资料,以及仿真模型的实现。
参考文献:
[1] Guo, Y., & Shao, J. (2019). A novel second-order sliding mode algorithm for position estimation of permanent magnet synchronous motor. IEEE Transactions on Industrial Electronics, 66(9), 6796-6805.
[2]
相关的代码,程序地址如下:http://nodep.cn/665776660623.html
















 1545
1545











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









