







 本文介绍了Docker的几种storage driver,包括AUFS、device mapper和overlayfs。AUFS以其快速启动时间和高效存储利用受到青睐,但并非所有Linux发行版都支持。device mapper稳定且社区支持良好,但内存使用效率不高。overlayfs设计简洁,性能可能优于AUFS,但需谨慎使用。每种驱动在文件读写、删除、性能表现和使用场景上都有所不同。
本文介绍了Docker的几种storage driver,包括AUFS、device mapper和overlayfs。AUFS以其快速启动时间和高效存储利用受到青睐,但并非所有Linux发行版都支持。device mapper稳定且社区支持良好,但内存使用效率不高。overlayfs设计简洁,性能可能优于AUFS,但需谨慎使用。每种驱动在文件读写、删除、性能表现和使用场景上都有所不同。
title: Docker之几种storage driver比较
date: 2015-11-27 18:16:22
tags: docker
categories: Docker Others
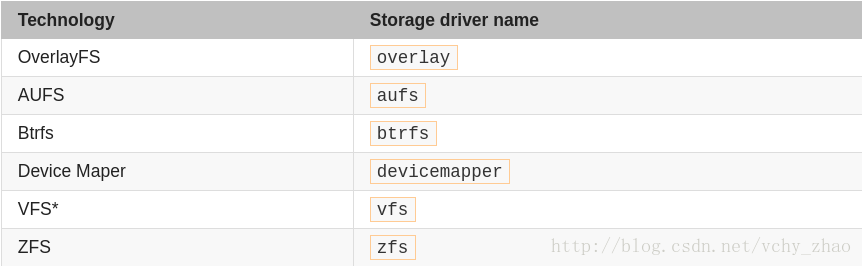
本文介绍Docker使用的几种storage driver。目前Docker支持如下几种storage driver:
目录:
* storage driver的选择
* aufs
* aufs中文件的读写
* aufs这中文件的删除
* Docker中使用aufs
* device mapper
* device mapper中镜像的分层和共享
* device mapper中的读操作
* device mapper中的写操作
* device mapper在Docker中的性能表现
* overlayfs
* overlayfs中镜像的分层和共享
* overlayfs中镜像和容器的结构
* overlayfs中容器的读写操作
* 在Docker中使用overlayfs
* overlayfs在Docker中的性能表现
Storage Driver的选择
可以使用docker info命令查看你的Docker使用的storage driver,我的机器上的信息如下:
Storage Driver: aufs
...
Root Dir: /var/lib/docker/aufs
Backing Filesystem: extfs
...可以看到的我本机上使用的storage driver是aufs。此外,还有一个Backing Filesystem它只你本机的文件系统,我的是extfs,aufs是在extfs之上创建的。你能够使用的storage driver是与你主机上的Backing Filesystem有关的。比如,btrfs只能在backing filesystem为btrfs上的主机上使用。storage driver与Backing Filesystem的匹配关系如下表所示(表来自Docker官网Docker docs):
|Storage driver |Must match backing filesystem |
|---------------|------------------------------|
|overlay |No |
|aufs |No |
|btrfs |Yes |
|devicemapper |No |
|vfs* |No |
|zfs |Yes |你可以通过在docker daemon命令中添加--storage-driver=<name>标识来指定要使用的storage driver,或者在/etc/default/docker文件中通过DOCKER_OPTS指定。
选择的storage driver对容器中的应用是有影响的,那具体选择哪种storage driver呢?答案是“It depends”,有如下几条原则可供参考:
- 选择你及你的团队最熟悉的;
- 如果你的设施由别人提供技术支持,那么选择它们擅长的;
- 选择有比较完备的社区支持的。
AUFS
AUFS是Docker最先使用的storage driver,它技术很成熟,社区支持也很好,它的特性使得它成为storage driver的一个好选择,使用它作为storage driver,Docker会:
- 容器启动速度很快
- 存储空间利用很高效
- 内存的利用很高效
尽管如此,仍有一些Linux发行版不支持AUFS,主要是它没有被并入Linux内核。
下面对AUFS的特性做介绍:
AUFS是一种联合文件系统,意思是它将同一个主机下的不同目录堆叠起来(类似于栈)成为一个整体,对外提供统一的视图。AUFS是用联合挂载来做到这一点。
AUFS使用单一挂载点将多个目录挂载到一起,组成一个栈,对外提供统一的视图,栈中的每个目录作为一个分支。栈中的每个目录包括联合挂载点都必须在同一个主机上。
在Docker中,AUFS实现了镜像的分层。AUFS中的分支对应镜像中的层。
此外,容器启动时创建的读写层也作为AUFS的一个分支挂载在联合挂载点上。
aufs中文件的读写
AUFS通过写时复制策略来实现镜像镜像的共享和最小化磁盘开销。AUFS工作在文件的层次上,也就是说AUFS对文件的操作需要将整个文件复制到读写层内,哪怕只是文件的一小部分被改变,也需要复制整个文件。这在一定成度上会
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 833
833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









