






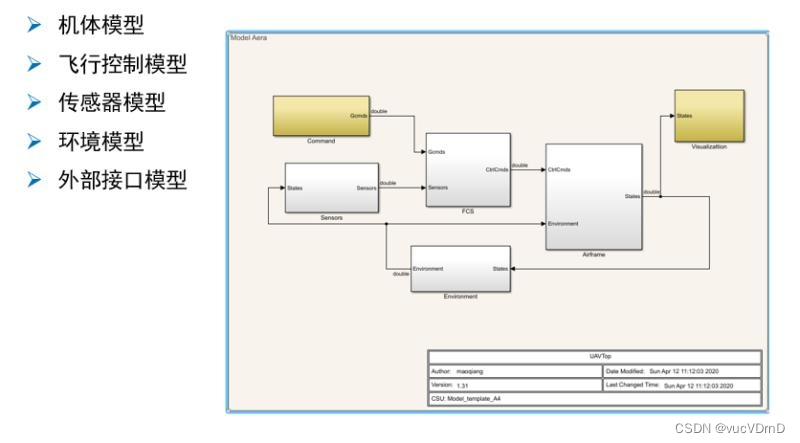
simulink仿真,提供MBSE的无人机开发解决方案及仿真模型;
1、SysML语言系统架构设计
2、Matlab simulink stateflow建模详细设计
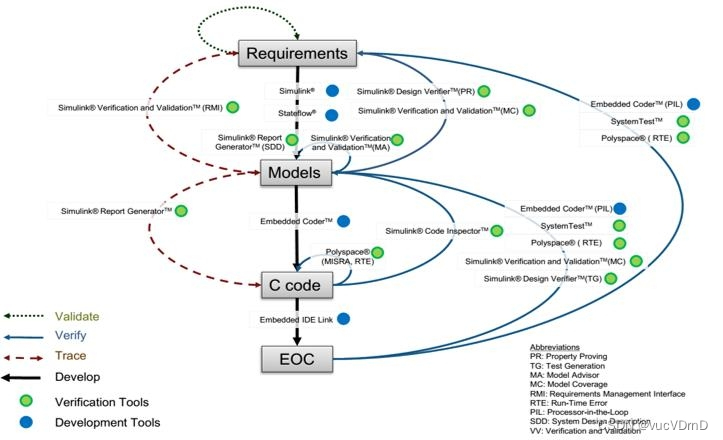
3、模型自动化测试(规范、缺陷、功能、覆盖率、MIL、SIL、PIL、HIL)、自动报告生成
4、自动代码生成优化
5、代码到硬件部署(FPGA Zynq 、DSP、STM32、ARM)
Simulink仿真已经成为无人机开发解决方案的热门选择之一,它能够提供全面的系统架构设计及详细建模,帮助开发者轻松实现模型自动化测试、自动代码生成和代码到硬件部署。本文将从以下五个方面深入探讨Simulink仿真在无人机开发中的应用。
- SysML语言系统架构设计
在无人机开发过程中,SysML语言系统架构设计是不可或缺的一步。它能够为开发者提供系统的全貌,把系统分解为若干部分并描述它们之间的关系。使用Simulink仿真支持SysML语言的系统架构设计,可以更加直观地展现系统的结构,有助于更好地理解和识别系统中的各个部件及其作用。
- Matlab Simulink Stateflow建模详细设计
Matlab Simulink Stateflow建模详细设计是Simulink仿真中的重要环节,对无人机开发的成功至关重要。在这一步中,开发者可以通过建立详细的模型,精确把握系统的各项功能和性能指标,并对系统各个模块进行优化。此外,在建模过程中,还可以通过Stateflow进行状态图分析和状态机建模,更加清晰地呈现系统的运作流程,帮助开发者快速识别系统中的问题并及时解决。
- 模型自动化测试
模型自动化测试是无人机开发过程中不可或缺的重要环节。在Simulink仿真中,可以通过编写测试用例和规范,进行缺陷、功能、覆盖率等多方位测试,并自动生成相应的测试报告。同时,Simulink仿真支持MIL、SIL、PIL、HIL等多种测试方式,确保在不同环境下的模型测试效果一致。
- 自动代码生成优化
自动代码生成是Simulink仿真的另一大优势,能够将模型转换为可执行代码并直接部署到目标硬件平台上。在这一过程中,开发者可以通过对代码生成的优化,提高代码的可读性、维护性和可靠性,减少代码出错的概率,进而提高无人机的稳定性和安全性。
- 代码到硬件部署
代码到硬件部署是无人机开发过程中至关重要的一步。在Simulink仿真中,可以直接将已优化的代码部署到不同硬件平台上,如FPGA Zynq、DSP、STM32、ARM等。这能够帮助开发者快速实现系统的硬件部署,提高开发效率和精度。
总之,Simulink仿真在无人机开发中的应用越来越广泛,它能够提供全面的无人机开发解决方案,为开发者带来不少便利和支持。本文重点介绍了Simulink仿真中SysML语言系统架构设计、Matlab Simulink Stateflow建模详细设计、模型自动化测试、自动代码生成优化以及代码到硬件部署等五个方面的应用,希望对读者有所启发。
相关代码,程序地址:http://lanzouw.top/654069996794.html















 102
102











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









