







 本文详细介绍了无人机影像三维重建过程中的空三控制点平差步骤。首先,通过检查空三成果的点云状态来判断空三是否正常,并依据空三报告评估精度和质量。接着,导入并编辑控制点,确保每个控制点至少有3个匹配的照片以进行平差。在二次空三计算中,依据控制点位置和精度进行平差调整,最后检查平差后的误差是否在允许范围内,从而完成空三平差流程。
本文详细介绍了无人机影像三维重建过程中的空三控制点平差步骤。首先,通过检查空三成果的点云状态来判断空三是否正常,并依据空三报告评估精度和质量。接着,导入并编辑控制点,确保每个控制点至少有3个匹配的照片以进行平差。在二次空三计算中,依据控制点位置和精度进行平差调整,最后检查平差后的误差是否在允许范围内,从而完成空三平差流程。
第四章 ContextCapture 19 空三控制点平差
一、检查空三成果
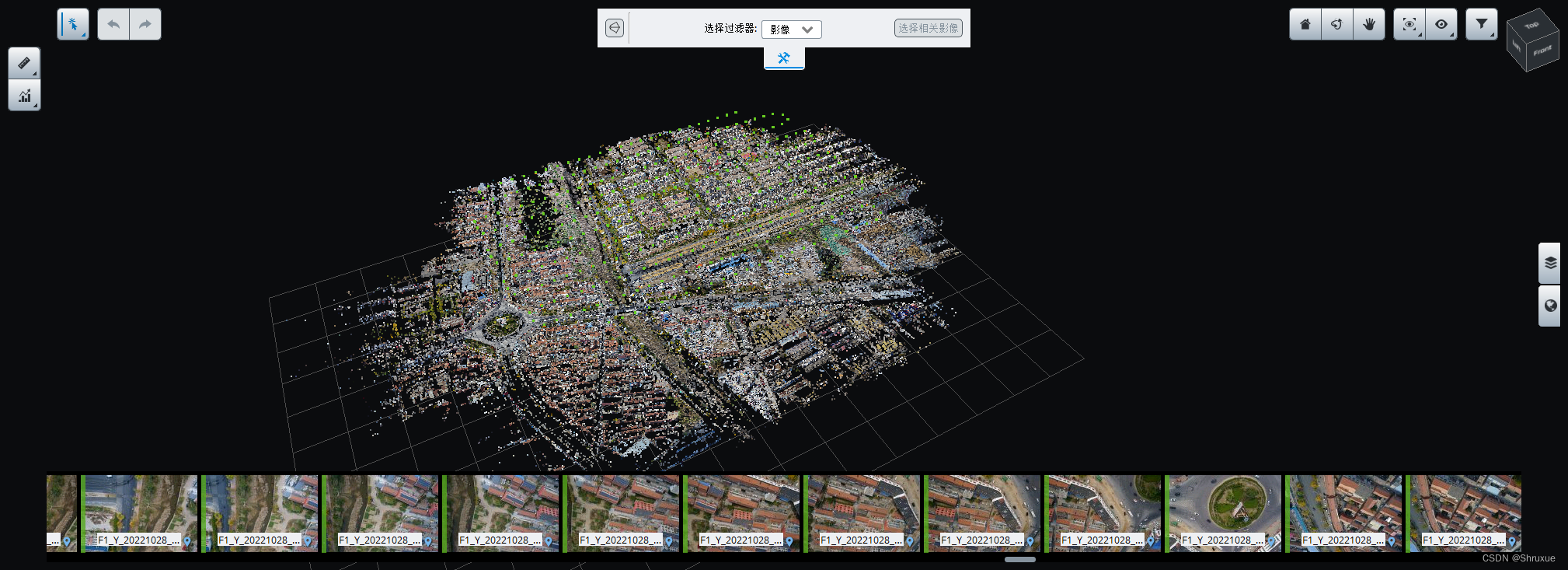
空三结束后,会生成连接点云,再三维中,可以观察生成的结果,根据点云的状态,判断空三是否正常。
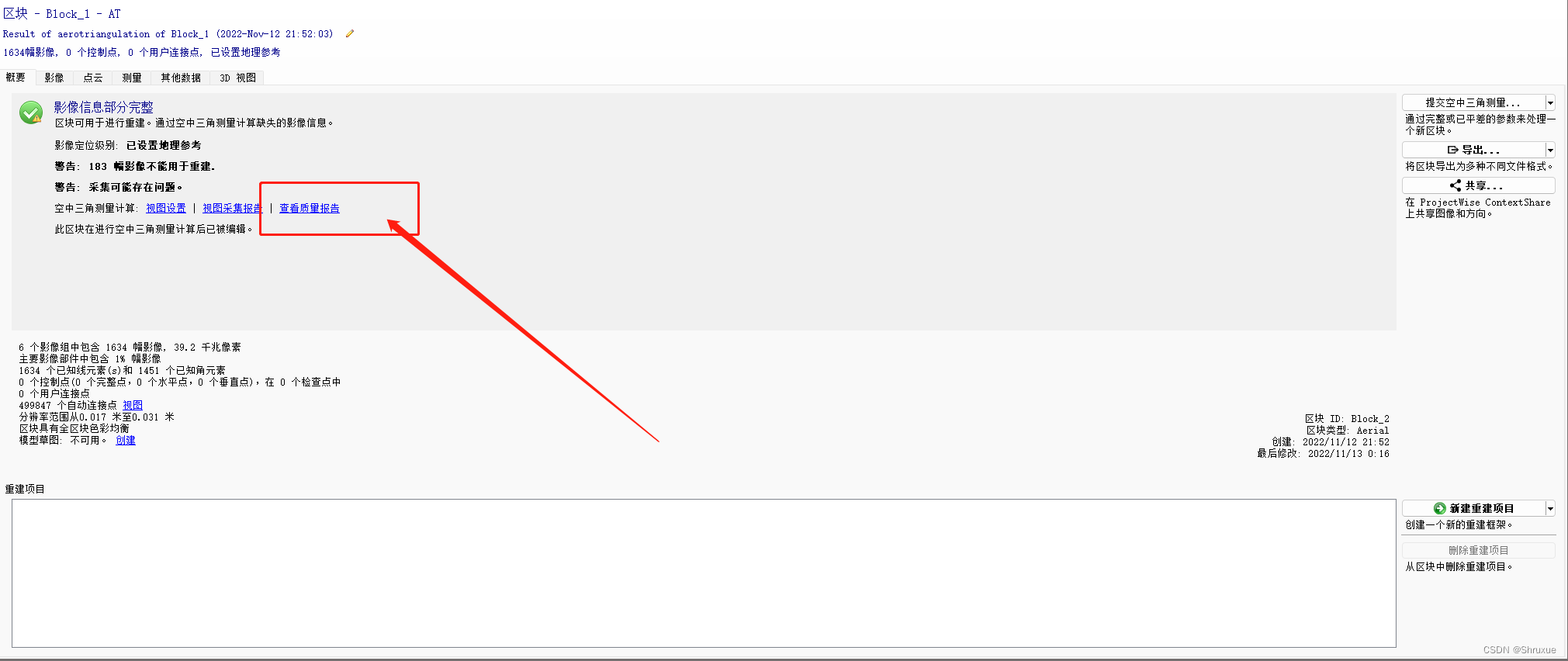
在这个位置,可以导出空三报告,根据空三报告来判断精度和质量。
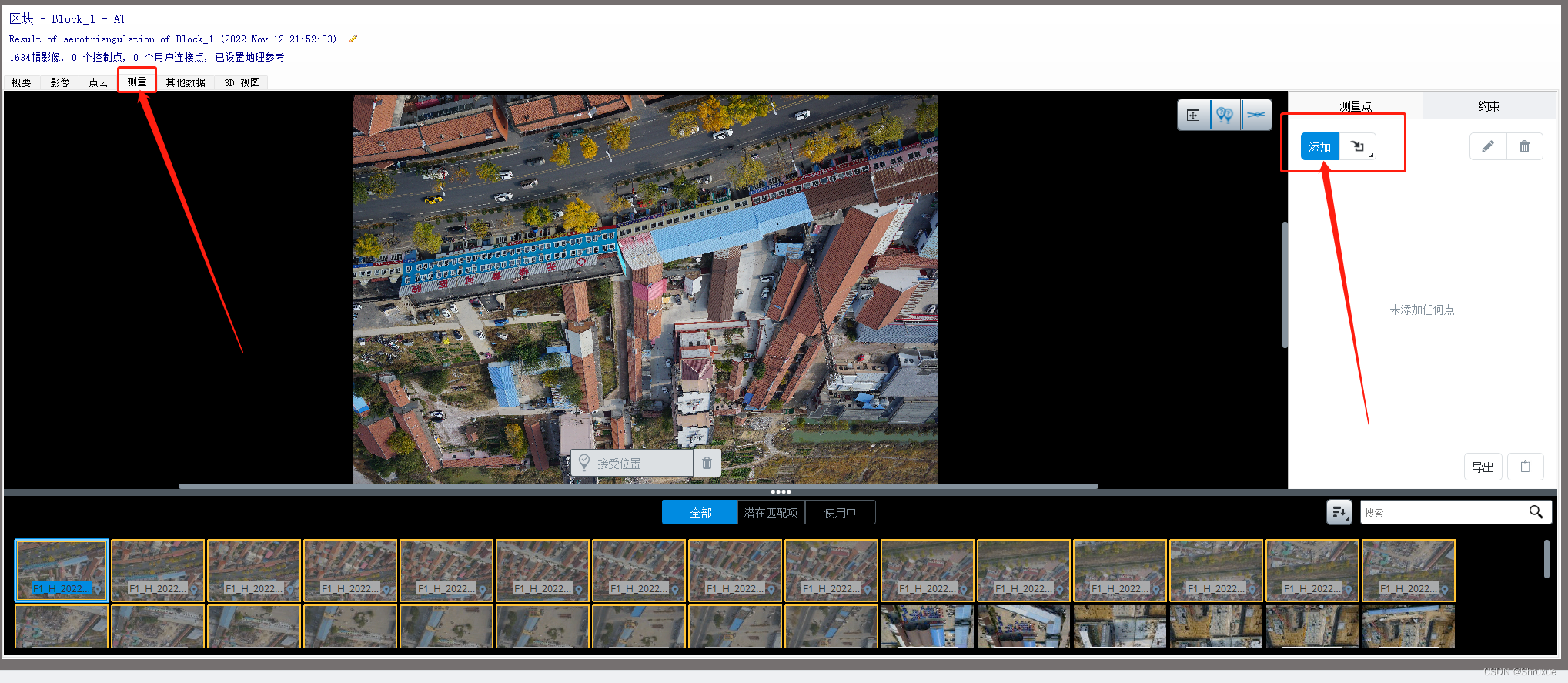
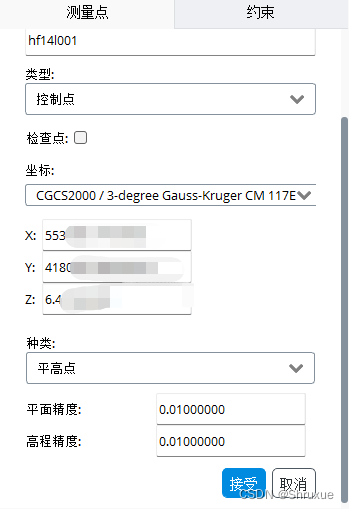
点击测量,将控制点导入到区块当中。在这里也可以手动添加连接点。
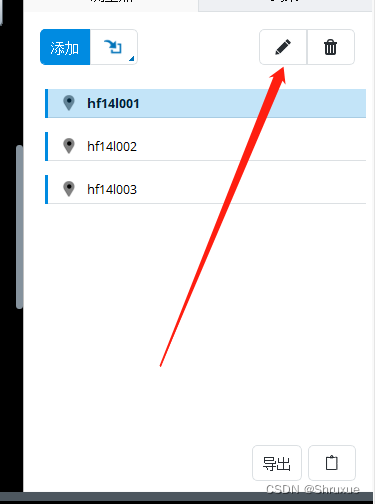
导入后点击编辑,可以调整控制点精度以及作用。
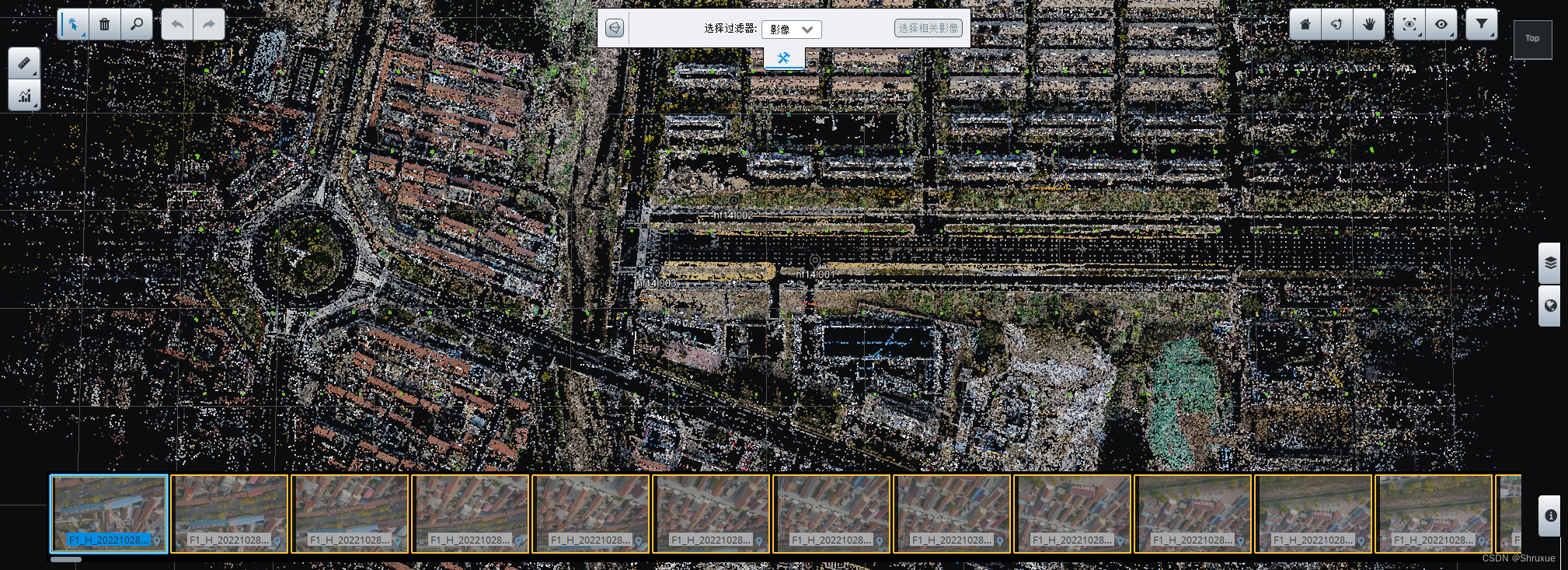
控制点导入后,可以再三维界面查看控制点对应位置。
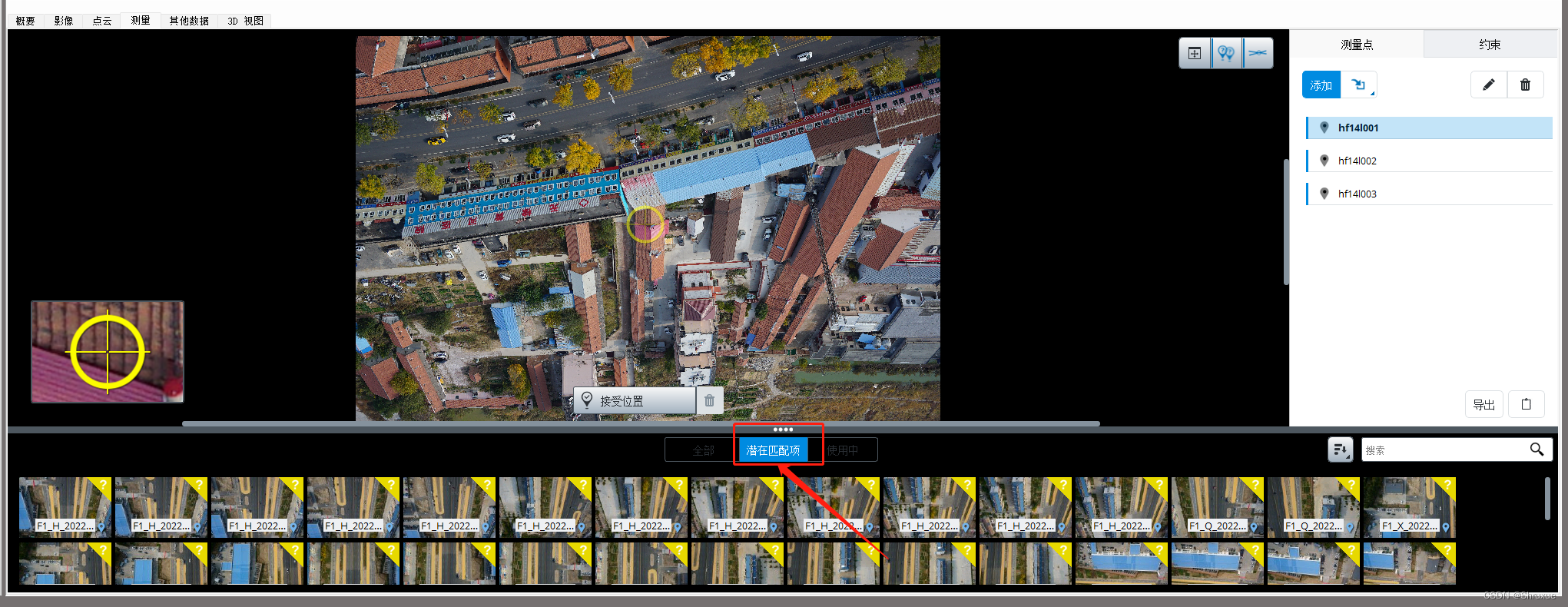 在测量当中,进行像控点匹配,每个控制点至少3个照片才可以平差,选择照片要清晰居中。
在测量当中,进行像控点匹配,每个控制点至少3个照片才可以平差,选择照片要清晰居中。
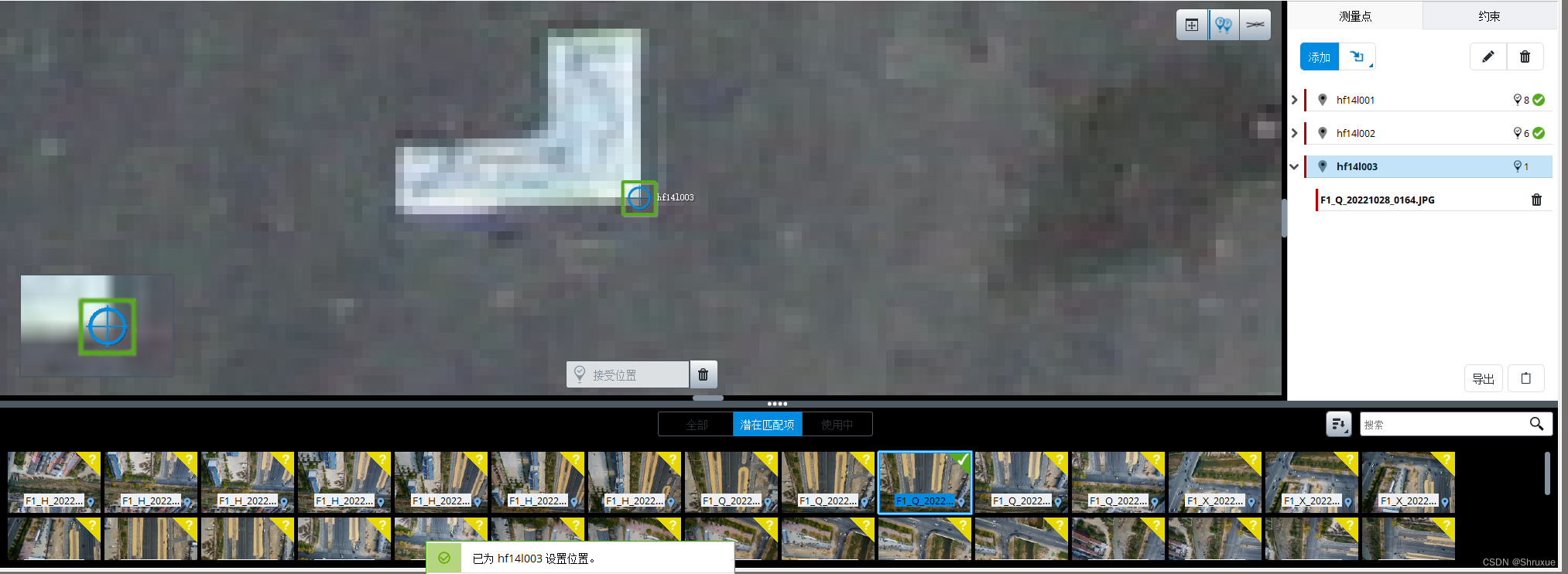
选择好对应相片后,接受位置即可添加该相片应用到平差计算当中。
二、二次空三计算


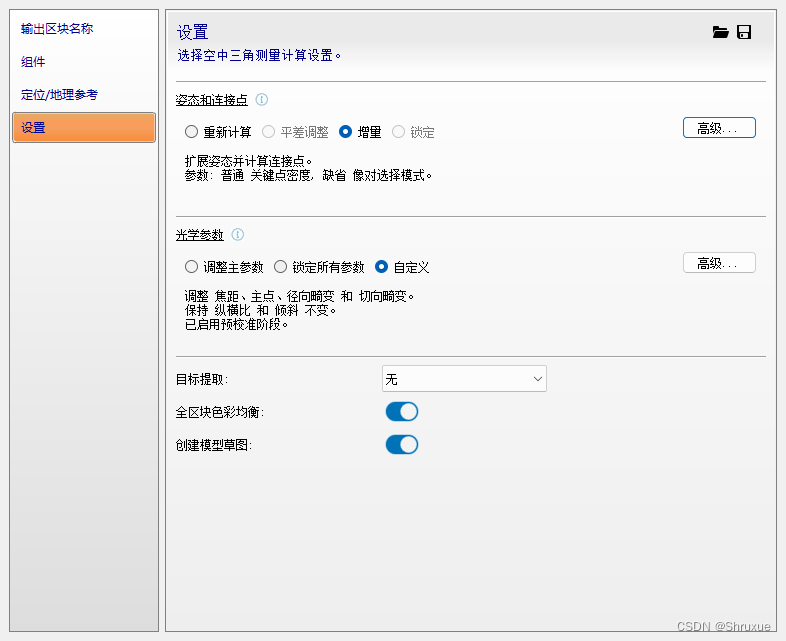

设置好参数后,进行二次空三计算,这次空三就根据控制点的位置和精度进行平差调整。
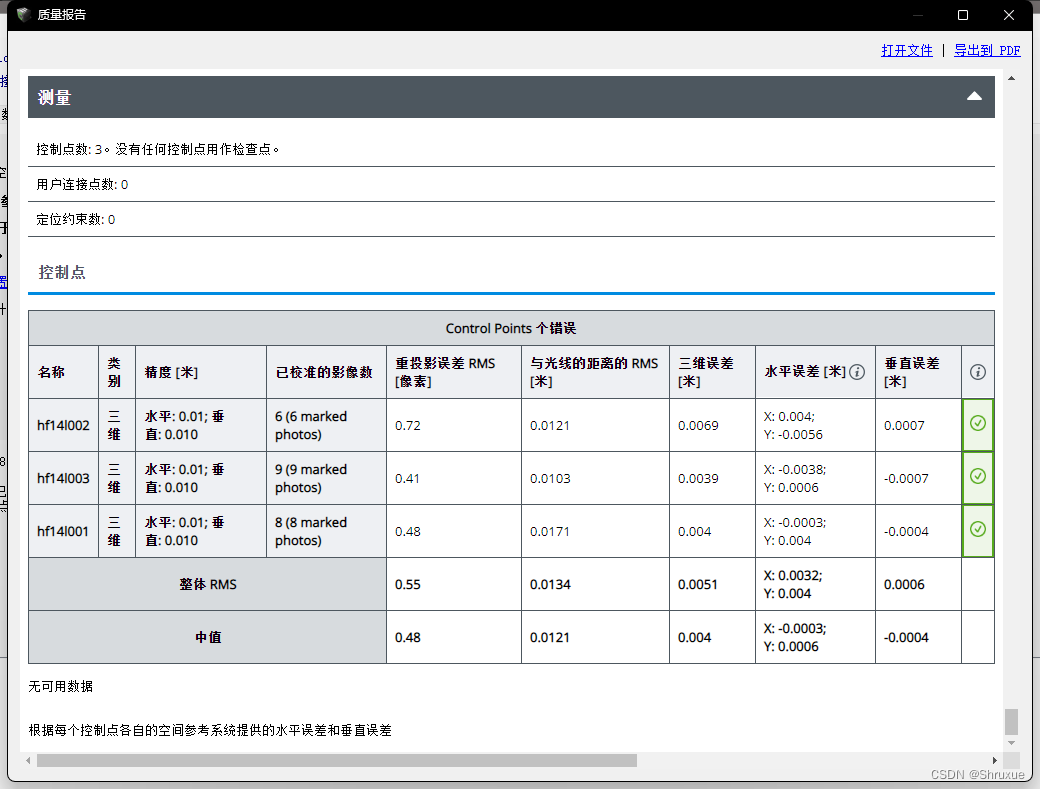
空三结束后,检查报告里的误差,看是否在允许范围内。到此,空三平差结束。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











