







 本文档详细介绍了使用ContextCapture进行空三处理的步骤,包括导入照片、调整相机参数、导入POS信息以及设置空三参数。在导入照片后,依据飞行数据调整区块类型,并进行空三设置,如选择合适的区块类型以匹配航拍情况。在空三过程中,关注关键点密度设置,并通过监视任务序列检查进度。确保照片排列与飞行路径一致,以保证最终的精度。
本文档详细介绍了使用ContextCapture进行空三处理的步骤,包括导入照片、调整相机参数、导入POS信息以及设置空三参数。在导入照片后,依据飞行数据调整区块类型,并进行空三设置,如选择合适的区块类型以匹配航拍情况。在空三过程中,关注关键点密度设置,并通过监视任务序列检查进度。确保照片排列与飞行路径一致,以保证最终的精度。
第三章 ContextCapture 19 空三处理
前言
之前一直在工作比较忙就没有更新,这次挑选了一组简单的照片用来演示。
一、导入相片
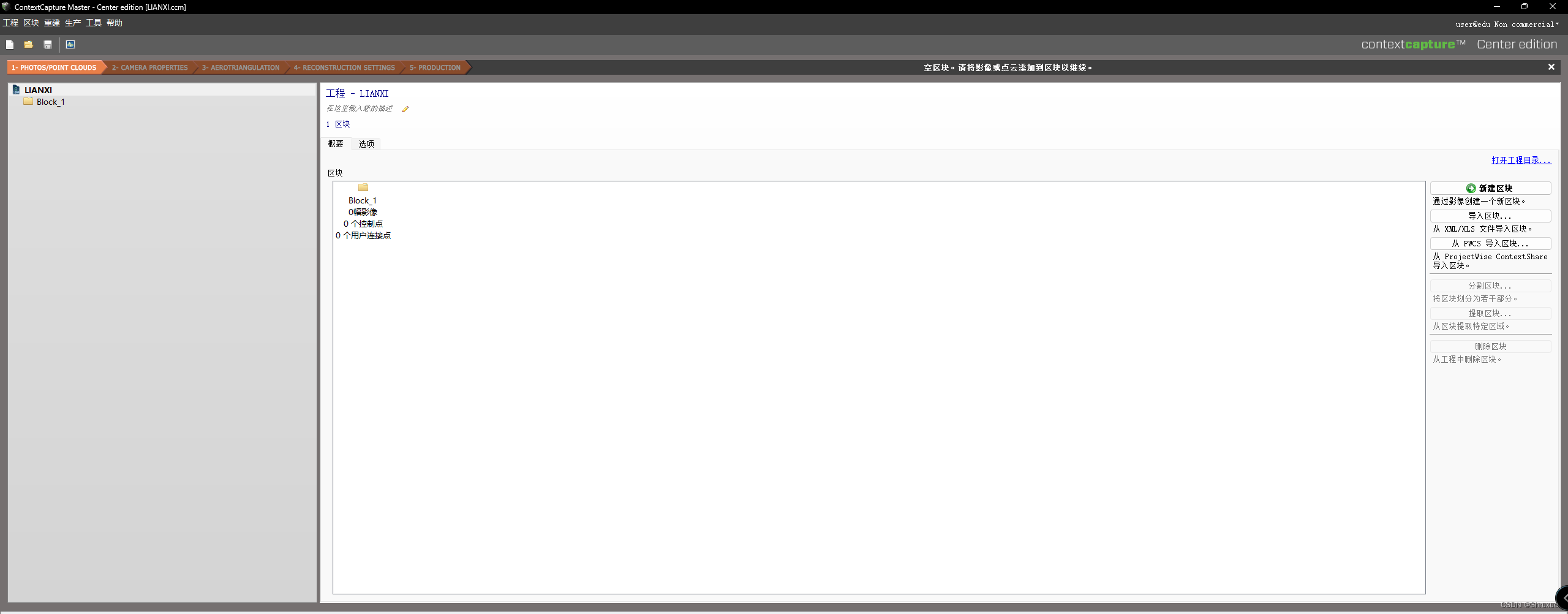
工程建立好后如图所示,我们需要建立一个区块,将照片导入到区块当中。
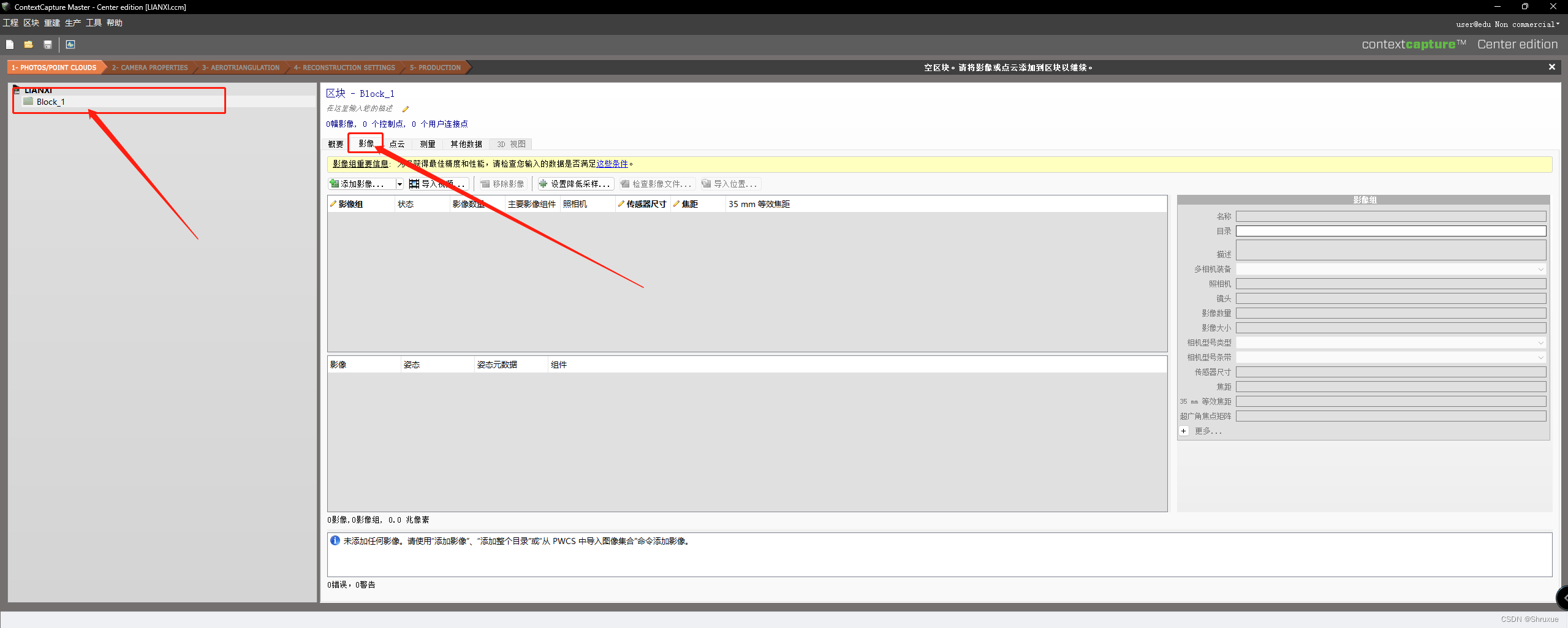
点击区块,选择影像,然后添加影像所在的目录。
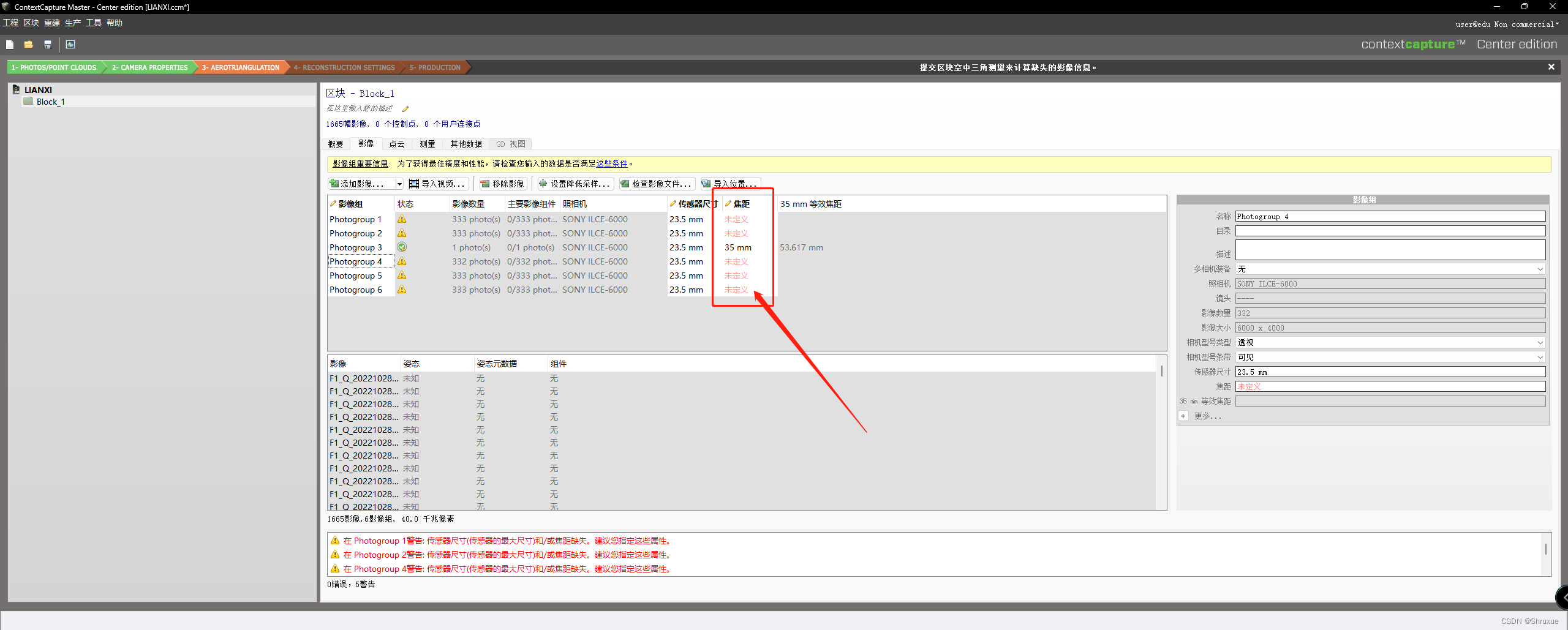
添加好照片后,需要根据拍摄的相机来进行修改对应参数。
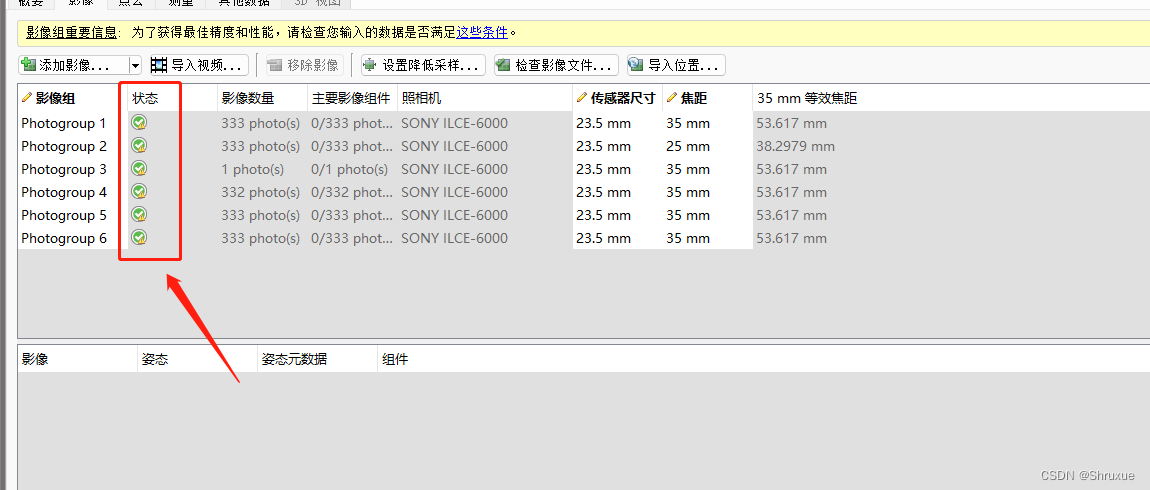
修改好后的照片状态会变成绿色,还有参数没修改好的情况下,会出现感叹号。
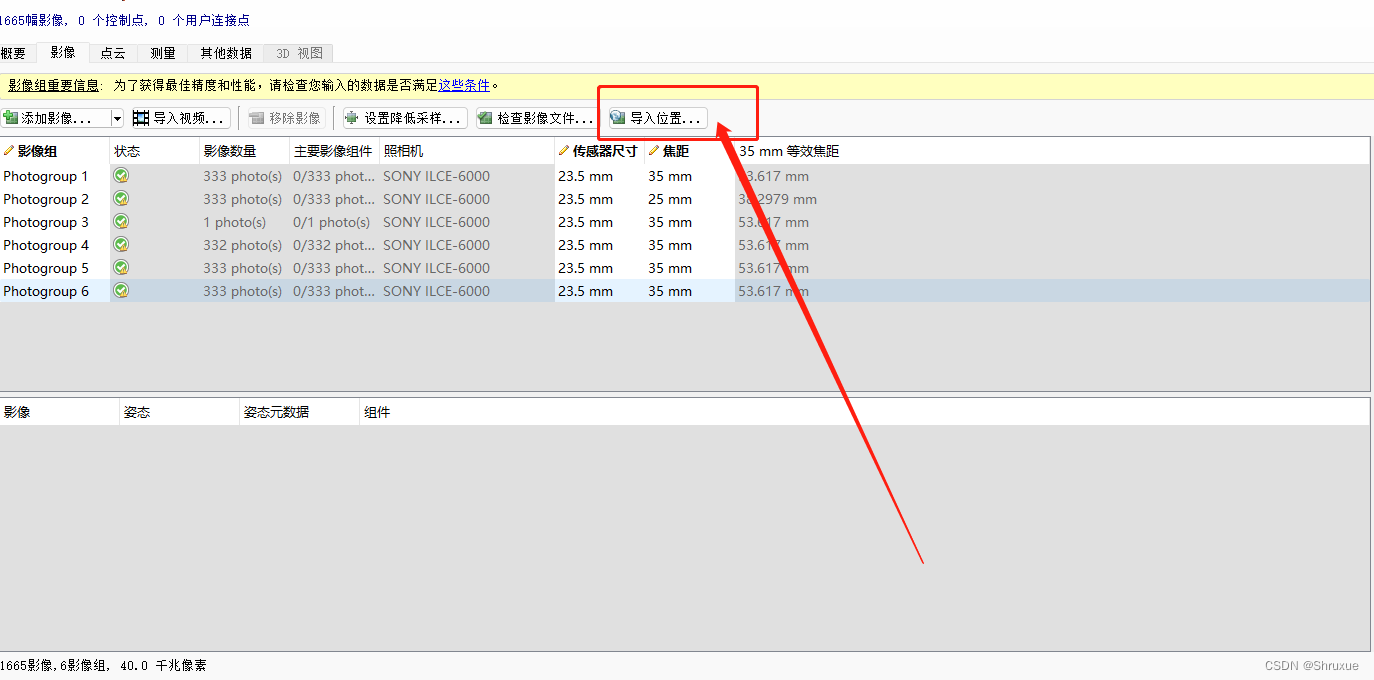
然后点击导入位置,将你照片的POS信息导入到区块当中。

这里要根据你飞机导出的坐标信息进行选择,如果选择错了,会影像后面的精度。如果你的飞机可以到处姿态信息的话,可以勾选“导入角元素”将姿态导入进去。
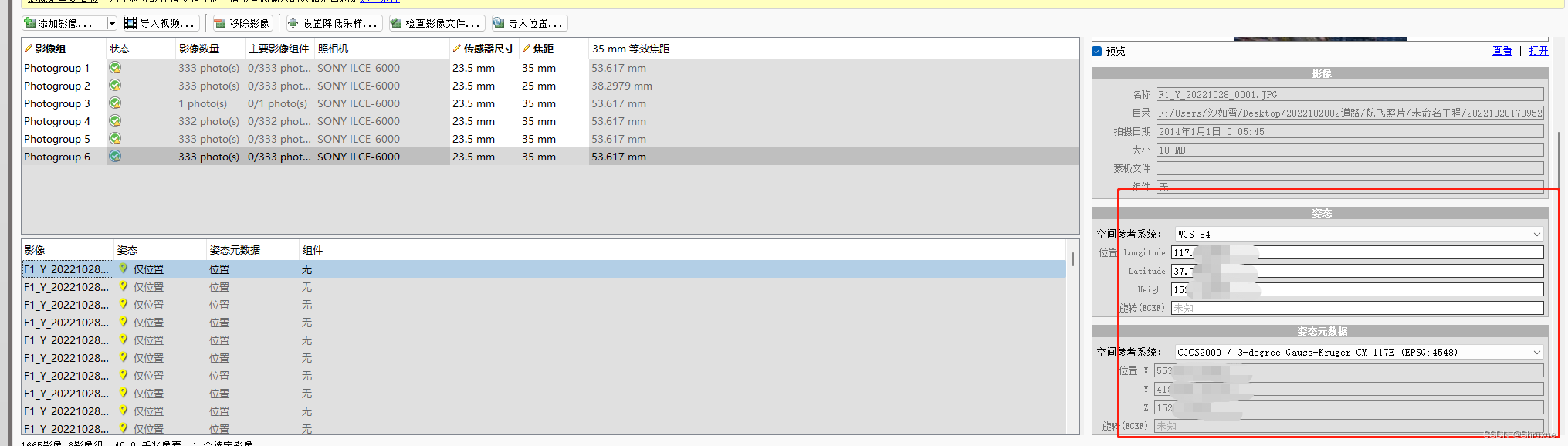
导入成功后,对应的照片会有位置信息。
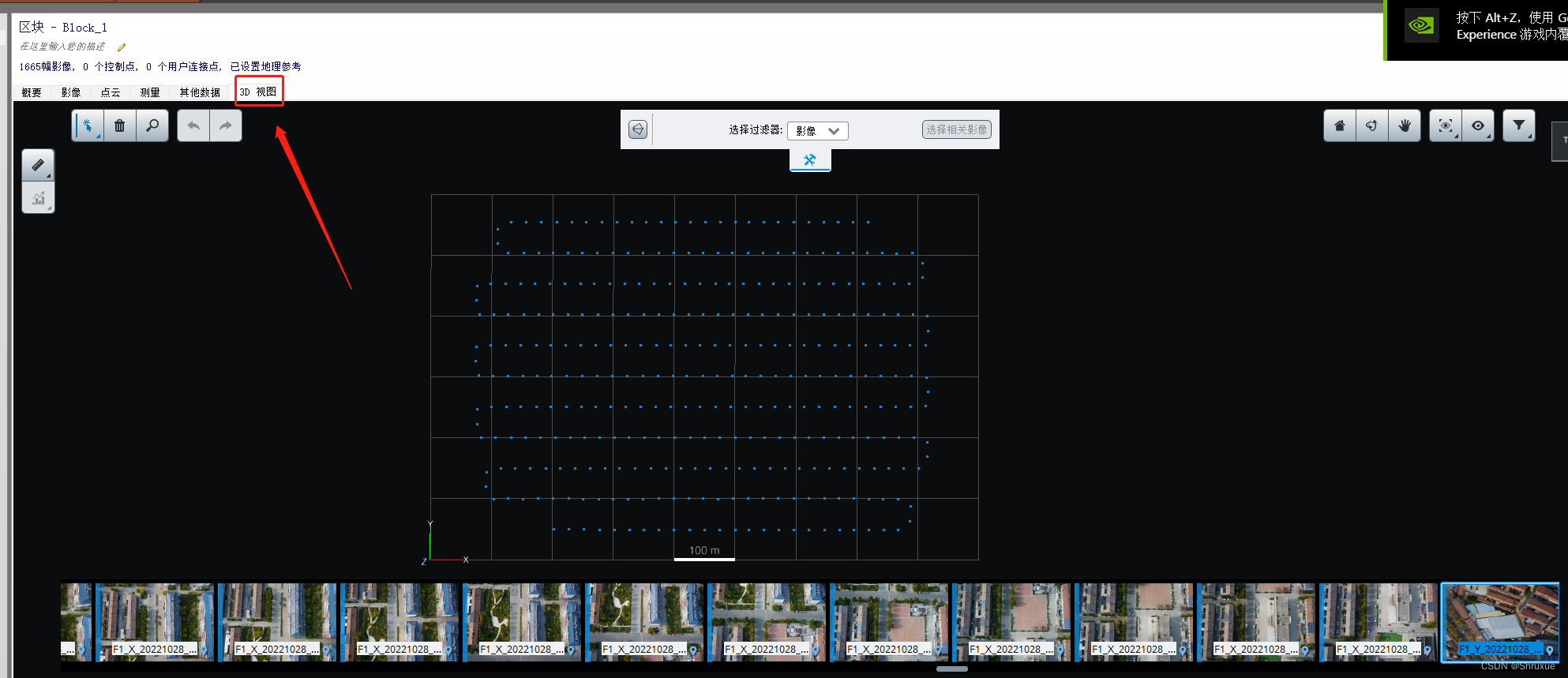
点击3D视图,导入位置信息后,照片会按照你当时航飞的航线进行排列,如果发现排列不整却,不是和飞行是的位置一直,说明你导入的信息不对,或者参数不正确。
二、空三设置
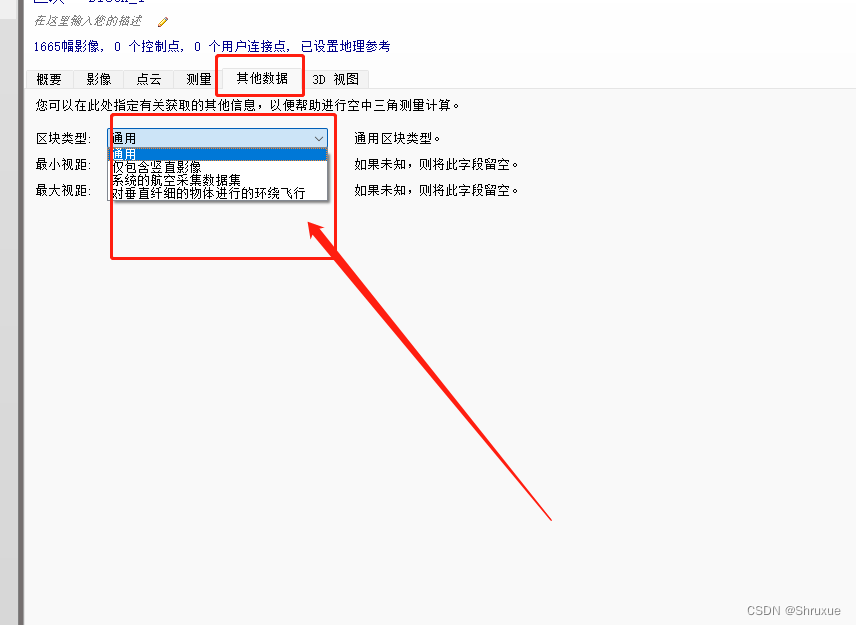
照片导入后,现在可以进行空三设置,首先设置区块类型,这个位置根据你的航飞情况进行设置,当进行单镜头正射拍摄时,选择第二个”仅包含竖直摄影“;当进行五镜头航飞采集时,选择第三个”系统的航空采集数据集“;当进行环绕飞行时,可以选在“对垂直的物体进行的环绕飞行”。
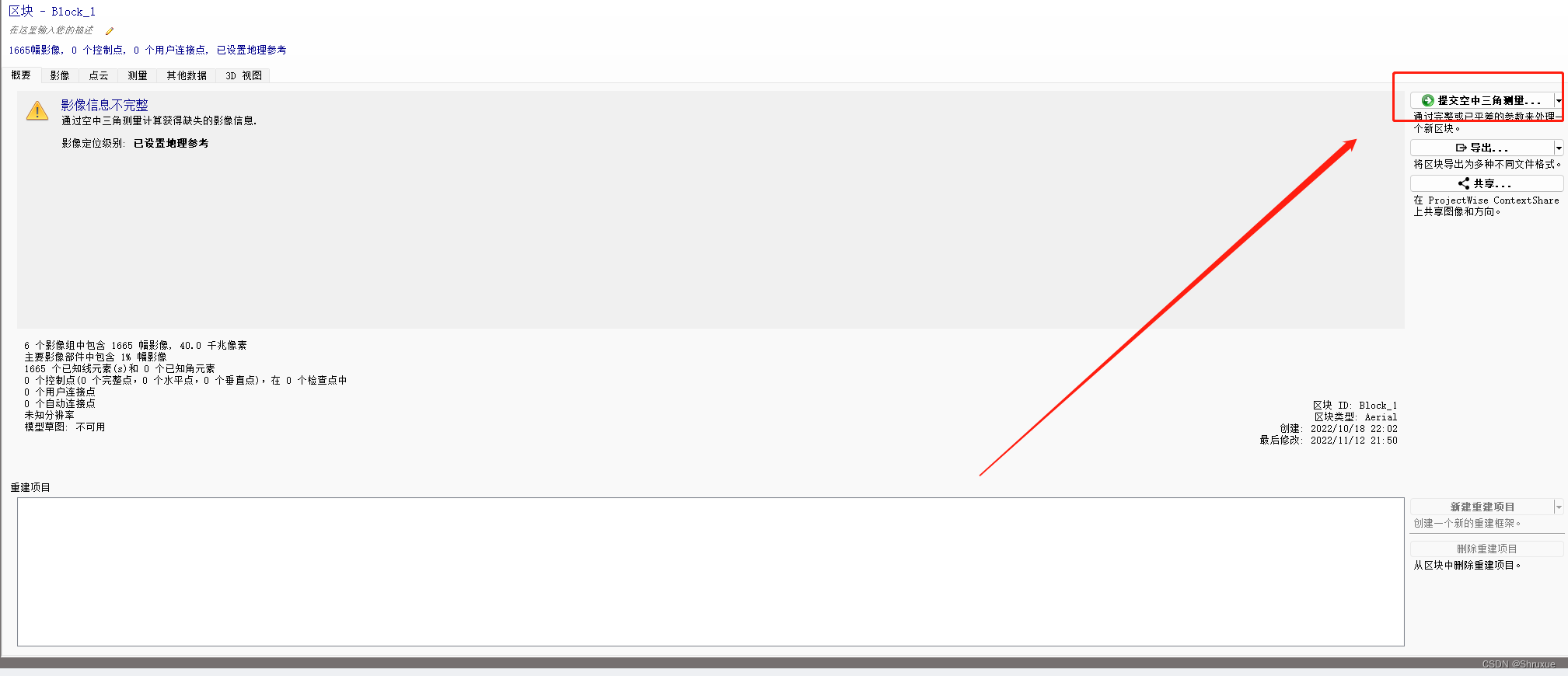
这些设置完毕后就可以进行空三了,点击概要,提交空中三角量。
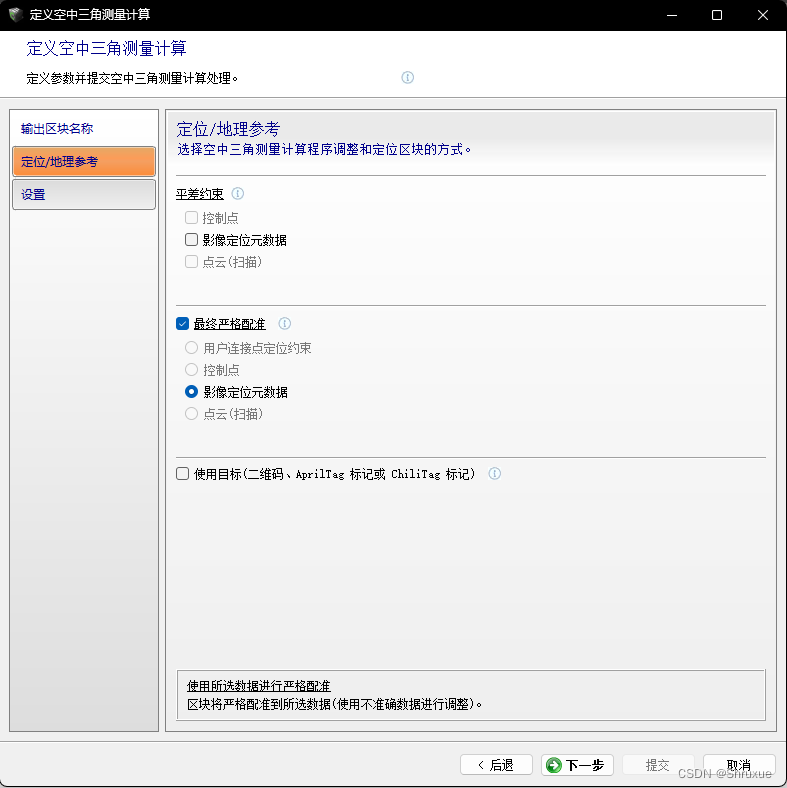
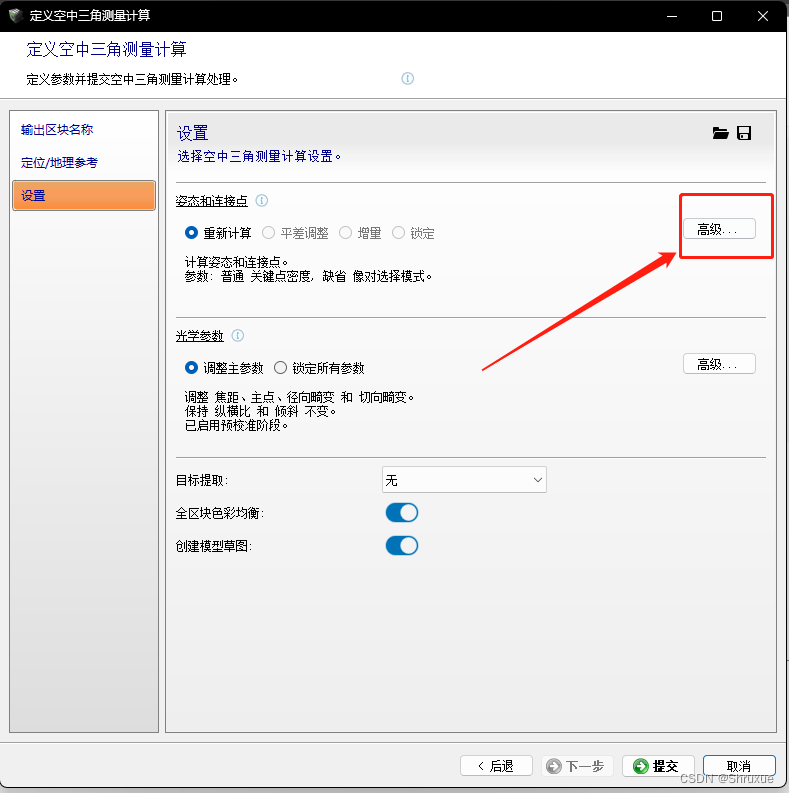
第一遍空三按照这样设置,点击高级的话还有更详细的设置。

第一遍的话关键点密度选择普通即可。提交后等待空三完成即可。
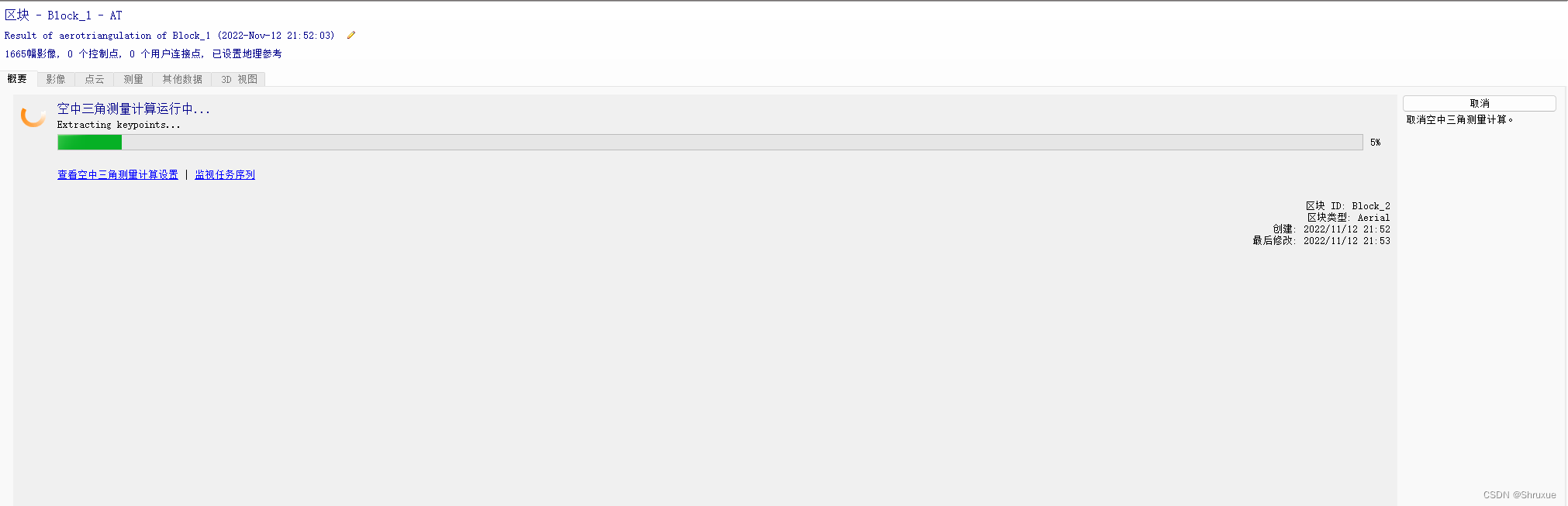
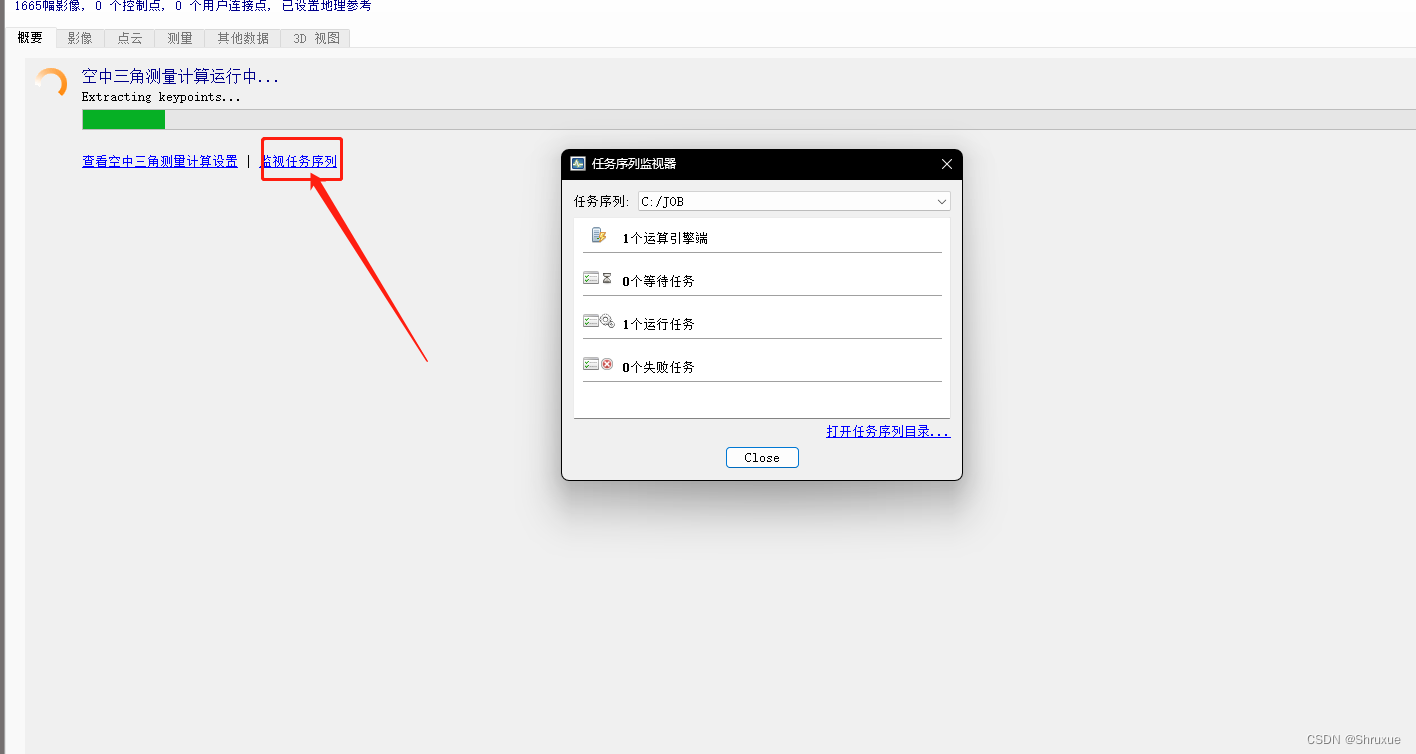
点击监视任务序列,可以查看任务运行情况。



















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











