







由于实际项目开发中,前后摄像头使用前后相同类型的Camera,前后Camera经FAE优化使得驱动参数不一致,此时需要使用两份不同的驱动文件;这就涉及到如何在同一款camera上同时使用两套不同的驱动;
硬件电路跟上一篇是一致的就不重复帖图了,请看:MTK Camera驱动移植
驱动兼容原则:“另外一份驱动使用自定义sensor ID 和sensor name中,在系统读取sensor ID的时候使用正确的ID进行匹配”;
这样就能够绕过两款摄像头都是相同的ID的问题了;
以SP5507+SP5507为例
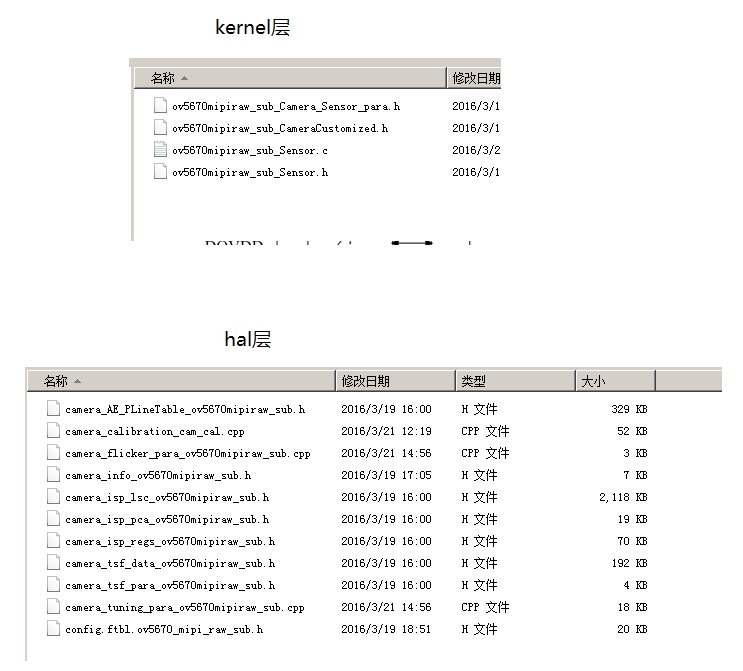
(4)sp5507_mipi_sub_raw拷贝到mediatek/custom/common/kernel/imgsensor/和mediatek/custom/common/hal/imgsensor/目录下;
(5)打开mediatek/custom/common/kernel/imgsensor/inc/kd_imgsensor.h文件, 定义sensor id和sensor name
#define SP5507MIPI_SENSOR_ID 0x5670
#define SENSOR_DRVNAME_SP5507MIPI_RAW "sp5507_mipi_raw"
#define SP5507MIPI_SUB_SENSOR_ID 0x5671 //在原来的基础上做加1
#define SENSOR_DRVNAME_SP5507MIPI_SUB_RAW "sp2509_mipi_sub_raw"
(6)在mediatek/custom/common/kernel/imgsensor/src/kd_sensorlist.h文件中声明初始化函数;
UINT32 SP5507_MIPI_RAW_SensorInit(PSENSOR_FUNCTION_STRUCT *pfFunc);
UINT32 SP5507_MIPI_SUB_RAW_SensorInit(PSENSOR_FUNCTION_STRUCT *pfFunc); //该函数为kernel中的初始化函数改为这个SP5507_MIPI_SUB_RAW_SensorInit;
在kdSensorList数组中添加:
#if defined(SP5507_MIPI_RAW)
{SP5507MIPI_SENSOR_ID, SENSOR_DRVNAME_SP5507MIPI_RAW, SP5507_MIPI_RAW_SensorInit},
#endif
#if defined(SP5507_MIPI_SUB_RAW)
{SP5507MIPI_SUB_SENSOR_ID, SENSOR_DRVNAME_SP5507MIPI_SUB_RAW,SP5507_MIPI_SUB_RAW_SensorInit},
#endif
(7)在mediatek/custom/common/hal/imgsensor/src/sensorlist.cpp文件的SensorList数组中添加
#if defined(SP5507_MIPI_RAW)
RAW_INFO(SP5507MIPI_SENSOR_ID, SENSOR_DRVNAME_SP5507MIPI_RAW, NULL),
#endif
#if defined(SP5507_MIPI_SUB_RAW)
RAW_INFO(SP5507MIPI_SUB_SENSOR_ID,SENSOR_DRVNAME_SP5507MIPI_SUB_RAW, NULL),
#endif
代码位置要跟kdSensorList数组中的位置保持一致;
(8) 修改mediatek/config/pro/ProjectConfig.mk配置文件
CUSTOM_HAL_IMGSENSOR=sp5507_mipi_raw
CUSTOM_HAL_MAIN_IMGSENSOR=sp5507_mipi_raw //后摄像头
CUSTOM_HAL_SUB_IMGSENSOR=sp5507_mipi_sub_raw//前摄像头
CUSTOM_KERNEL_IMGSENSOR=sp5507_mipi_raw
CUSTOM_KERNEL_MAIN_IMGSENSOR =sp5507_mipi_raw //后摄像头
CUSTOM_KERNEL_SUB_IMGSENSOR=sp5507_mipi_sub_raw //前摄像头
(9)驱动文件的修改
修改kernel层中部分重要的函数名和变量名,否则kernel在链接阶段会出现重复定义的错误提示;修改kernel和hal中的include对象,否则出现找不到.h文件的提示;
修改kernel层中的XXXXmipiraw_sub_Sensor.h文件中的Sensor ID宏为kd_imgsensor.h中定义的Sensor ID宏:
#define OV5670_SENSOR_ID SP5507MIPI_SUB_SENSOR_ID
再修改hal层中的camera_info_XXXXmipiraw.h中的SENSOR_ID和SENSOR_DRVNAME为kd_imgsensor.h中定义的宏,修改config.ftbl.XXXX_mipi_raw.h中的FTABLE_DEFINITION(SENSOR_DRVNAME_XXXX_MIPI_RAW)的SENSOR_DRVNAME为kd_imgsensor.h中定义的sensor name宏;
(10)修改kernel层中id匹配
搜索使用到获取设备id的代码段,发现只有open函数和getSensorID函数有通过i2c获取设备id的操作;
(11)上电时序
上电时序只需要在原来基础之上做下兼容就可以了;
打开mediatek\custom\pro\kernel\camera\camera\kd_camera_hw.c文件
修改kdCISModulePowerOn()函数;
在文件中两处使用到(0 == strcmp(SENSOR_DRVNAME_SP5507MIPI_RAW,currSensorName))的地方都加上加上“ || ( 0 == strcmp(SENSOR_DRVNAME_SP5507MIPI_SUB_RAW,currSensorName)) ” 就可以兼容前后摄像头了;
通过这一系列的操作,就实现了前后使用相同类型的camera设备并且前后对应各自的驱动代码;















 3234
3234











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









