






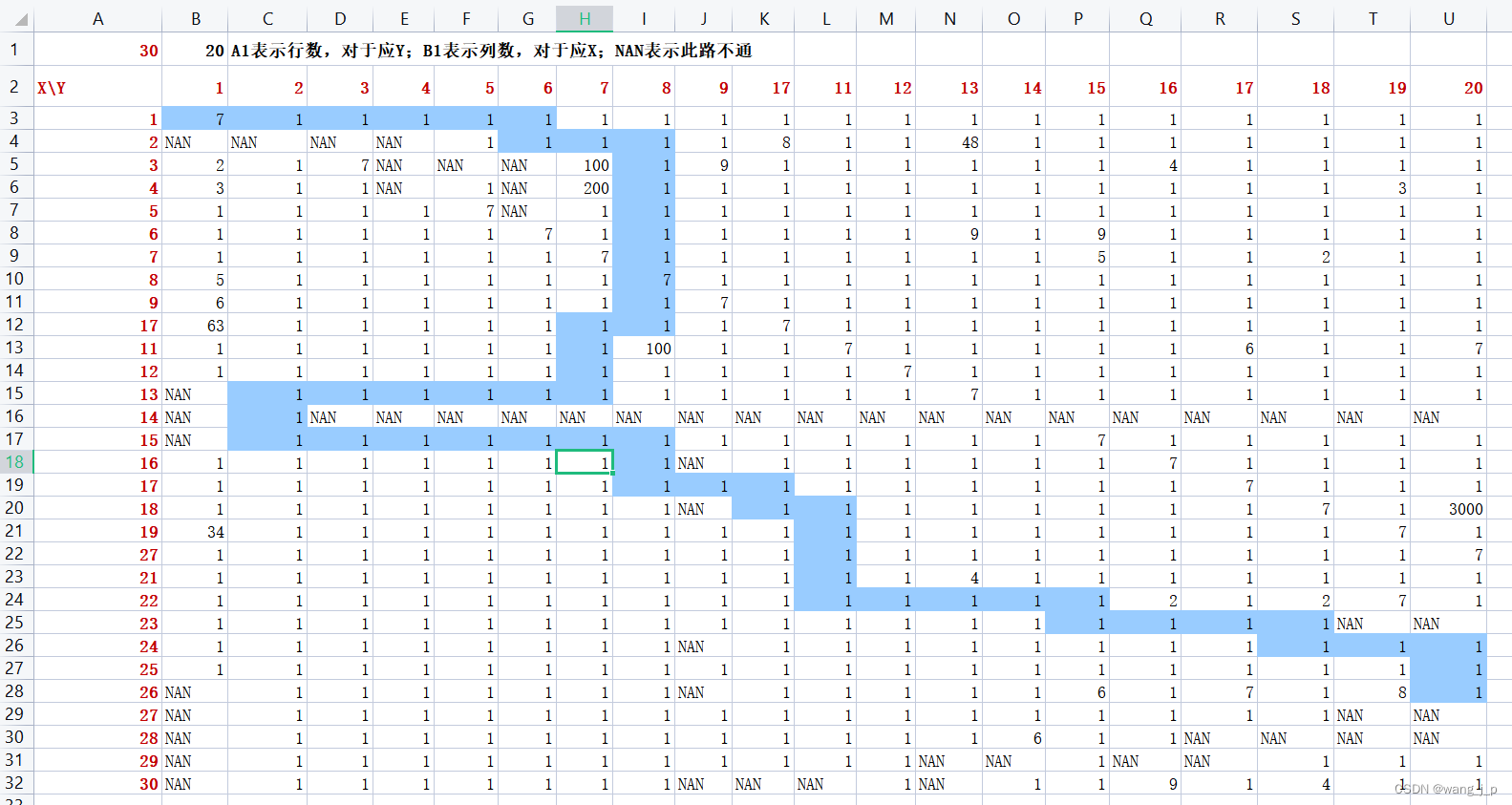
使用A*算法 计算路径, 算法测试中使用excel文件提供数据, 算法完成后,在excel中显示找到的路径
主要代码:
/// <summary>
/// 使用A* 算法
/// </summary>
/// <param name="graph"> 整个立库节点信息 </param>
/// <param name="startNode">开始的节点编号</param>
/// <param name="endNode">目标点的节点编号</param>
/// <returns>是否有用的路径</returns>
public bool SearchPath(List<IPathNode> graph, IPathNode startNode, IPathNode endNode)
{
init(graph);
APathNode startPathNode = GetAPathNode(startNode);
APathNode endPathNode = GetAPathNode(endNode);
if (startPathNode == null || endPathNode == null)
{ //节点不存在
return false;
}
try
{
//将起点加入开表
openList.Add(startPathNode);
while (openList.Count > 0)
{
APathNode currentNode = openList.Dequeue();//取出第一元素,在开表中删除
//将当前的节点移除开表,放入闭表中(将当前的节点标记为已评估节点)
closeList.Add(currentNode);
//如果评估点等于终点,找到寻路路径 ,结束寻路
if (currentNode == endPathNode)
{
RetracePath(endPathNode);
return true;
}
else
{
//遍历评估节点
List<APathNode> neighborNodes = GetNeighborNodes(currentNode);
foreach (APathNode neiNode in neighborNodes)
{
//如果闭表已经有该点(该点已经被评估过)或者该点是障碍物
if (!neiNode.NodeObj.IsAvailable || closeList.Contains(neiNode))
{
continue;
}
//新的 起点->neighbor =当前点->邻近点 +当前点->起点
//计算 该邻近点到起点总花费=当前到邻近点的距离+当前点到起点的花费
float newGGost = GetGCost(currentNode, neiNode);
//1.如果邻近点到起点总花费<之前已计算的花费,说明之前的路径存在绕远路,将邻近点的上一节点改为当前点
// 因为计算过邻近点Gcost,所有一定存在开表中,后面值为false
//2》.开表中不包含邻近点,该节点没有被遍历
bool flagContain = openList.Contains(neiNode); //是否包含相邻节点
if (newGGost < neiNode.GCost || !flagContain)
{
//更新邻近点的三大代价,将邻近点的上一节点设置为当前节点
neiNode.GCost = newGGost;
neiNode.HCost = GetHCost(neiNode, endPathNode);
neiNode.FCost = GetFCost(neiNode);
neiNode.PNode = currentNode;
//2》.如果开表中不包含邻近点,该节点没有被遍历
if (!flagContain)
{
openList.Add(neiNode);
}
} //end if
} // end foreach
}
} //end while
}
finally
{
//清除过程数据
closeList.Clear();
openList.Clear();
mapNodes.Clear();
}
return false;
}















 391
391











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









