






写在前面
前面几节分别介绍了模型变换,视变换,本节继续学习OpenGL坐标变换过程中的投影变换。这里主要是从数学角度推导投影矩阵。对数学不感兴趣的,可以稍微了解下,或者跳过本节内容。
本文主要翻译并整理自 songho OpenGL Projection Matrix一文,这里对他的推导思路稍微进行了整理。
通过本节可以了解到
- 透视投影矩阵的推导
- 正交投影矩阵的 推导
- 视口变换矩阵的推导
- zFighting问题
投影变换
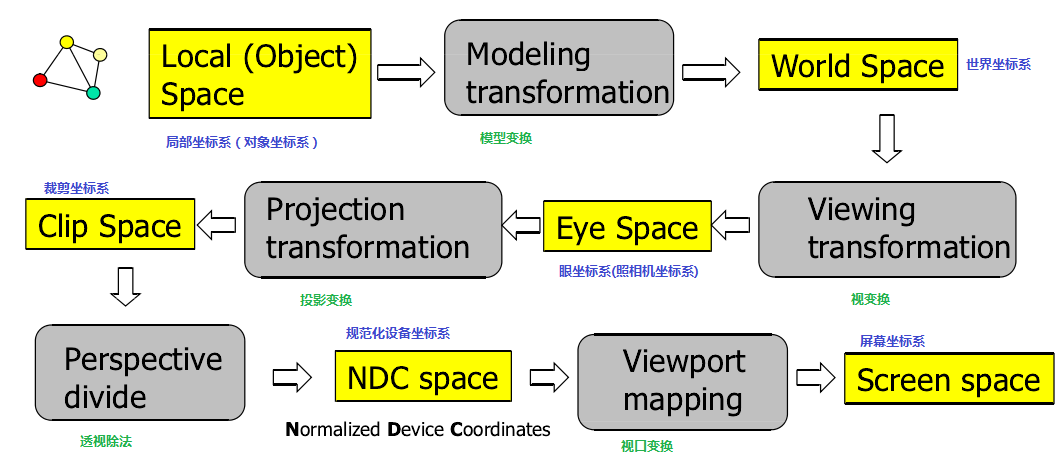
OpenGL最终的渲染设备是2D的,我们需要将3D表示的场景转换为最终的2D形式,前面使用模型变换和视变换将物体坐标转换到照相机坐标系后,需要进行投影变换,将坐标从相机—》裁剪坐标系,经过透视除法后,变换到规范化设备坐标系(NDC),最后进行视口变换后,3D坐标才变换到屏幕上的2D坐标,这个过程如下图所示:
投影变换通过指定视见体(viewing frustum)来决定场景中哪些物体将可能会呈现在屏幕上。在视见体中的物体会出现在投影平面上,而在视见体之外的物体不会出现在投影平面上。投影包括很多类型,OpenGL中主要考虑透视投影(perspective projection)和正交投影( orthographic projection)。两者之间存在很大的区别,如下图所示(图片来自Modern OpenGL):
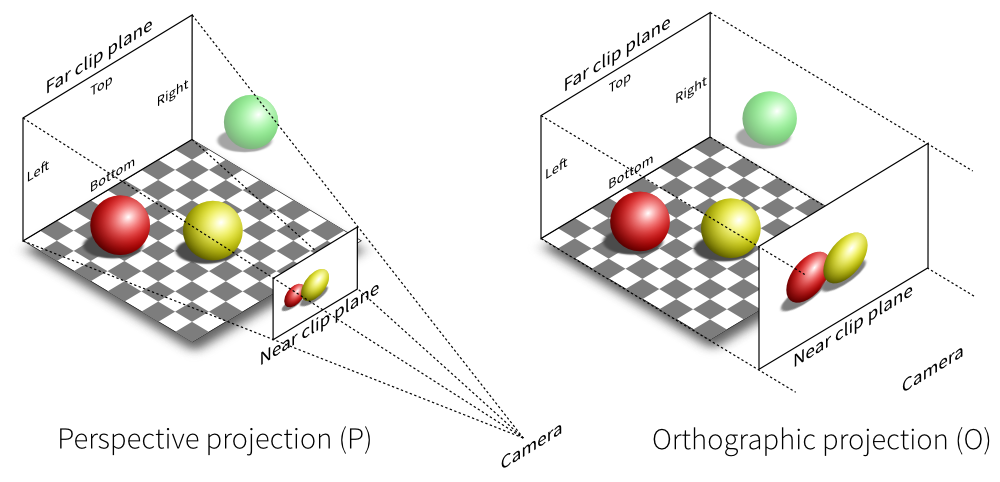
上面的图中,红色和黄色球在视见体内,因而呈现在投影平面上,而绿色球在视见体外,没有在投影平面上成像。
指定视见体通过(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble nearVal, GLdouble farVal)6个参数来指定。注意在相机坐标系下,相机指向-z轴,nearVal和farVal表示的剪裁平面分别为:近裁剪平面 z=−nearVal ,以及远裁剪平面 z=−farVal 。推导投影矩阵,就要利用这6个参数。在OpenGL中成像是在近裁剪平面上完成。
透视投影矩阵的推导
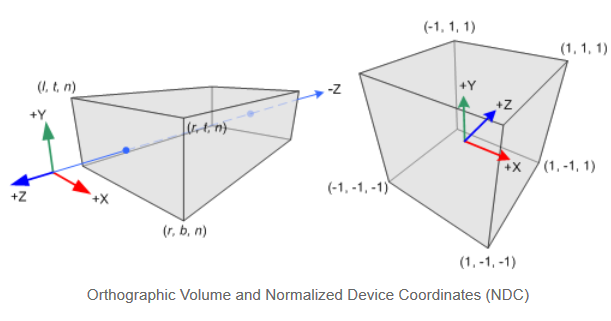
透视投影中,相机坐标系中点被映射到一个标准立方体中,即规范化设备坐标系中,其中
[l,r]映射到[−1,1]
,
[b,t]
映射到[-1,1]中,以及
[n,f]
被映射到
[−1,1]
,如下图所示:
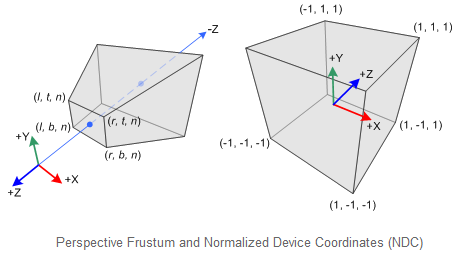
注意到上面的相机坐标系为右手系,而NDC中+z轴向内,为左手系。
我们的目标
求出投影矩阵的目标就是要找到一个透视投影矩阵P使得下式成立:
上面的除以 wclip 过程被称为透视除法。要找到我们需要的矩阵P,我们需要利用两个关系:
- 投影位置 xp , yp 和相机坐标系中点 xe , ye之间关系。投影后对于z分量都是 z_{p}=-nearVal$。
- 利用 xp , yp 和 xndc,yndc 关系求出 xclip,yclip 。
- 利用 zn 与 ze 关系得出 zclip
计算投影平面上的位置
投影时原先位于相机坐标系中的点
p=(xe,ye,ze)
投影到投影平面后,得到点
p′=(xp,yp,−nearVal)
。具体过程如下图所示:
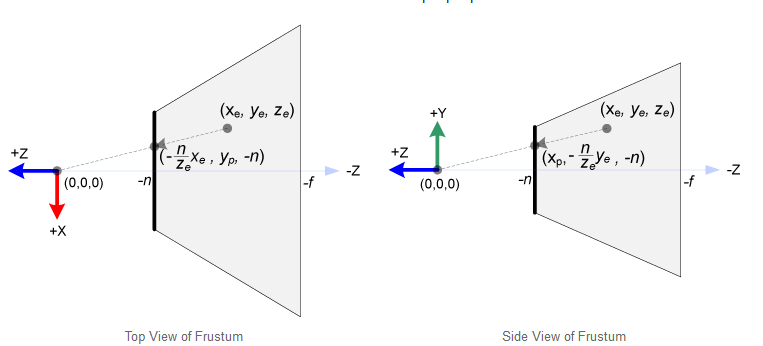
需要空间想象一下,可以得出左边的图是俯视图,右边是侧视图。
利用三角形的相似性,通过俯视图可以计算得到:
xpxe=−nze
即:
xp=xen−ze(1.1)
同理通过侧视图可以得到:
yp=yen−ze(1.2)
由(1)(2)这个式子可以发现,他们都除以了
−ze
这个量,并且与之成反比。这可以作为透视除法的一个线索,因此我们的矩阵P的形式如下:
也就是说 wc=−ze 。
下面利用投影点和规范化设备坐标的关系计算出矩阵P的前面两行。
对于投影平面上 xp 满足 [l,r] 线性映射到 [−1,1] 对于 yp 满足 [b,t] 线性映射到 [−1,1] 。
其中 xp 的映射关系如下图所示:
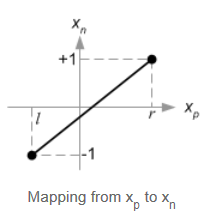
则可以得到
xp
的线性关系:
xn=2r−lxp+β(1.3)
将(r,1)带入上式得到:
β=−r+lr−l
带入式子3得到:
xn=2r−lxp−r+lr−l(1.4)
将式子1带入式子5得到:
由式子6可以得到:
xc=2nr−lxe+r+lr−l∗ze(1.6)
对于
yp
的映射关系如下:
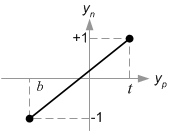
同理也可以计算得到:
yc=2nt−bye+t+bt−b∗ze(1.8)
由式子7和9可以得到矩阵P的前两行和第四行为:
由于
ze
投影到平面时结果都为
−n
,因此寻找
zn
与之前的x,y分量不太一样。我们知道
zn
与x,y分量无关,因此上述矩阵P可以书写为:
则有:
zn=Aze+Bwe−ze
,由于相机坐标系中
we=1
,则可以进一步书写为:
zn=Aze+B−ze(1.9)
要求出系数A,B则,利用
zn
与
ze
的映射关系为:(-n,-1)和(-f,1),代入式子10得到:
A=−f+nf−n
和
B=−2fnf−n
,
则
zn
与
ze
的关系式表示为:
zn=−f+nf−nze−2fnf−n−ze(1.10)
将A,B代入矩阵P得到:
上述矩阵时一般的视见体矩阵,如果视见体是对称的,即满足
r=−l,t=−b
,则矩阵P可以简化为:
使用Fov指定的透视投影
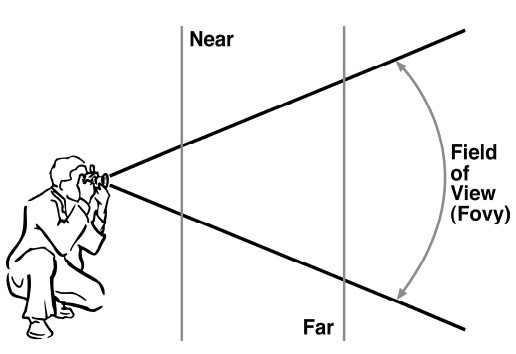
另外一种经常使用 的方式是通过视角(Fov),宽高比(Aspect)来指定透视投影,例如旧版中函数gluPerspective,参数形式为:
API void gluPerspective(GLdouble fovy, GLdouble aspect, GLdouble zNear, GLdouble zFar);
其中指定fovy指定视角,aspect指定宽高比,zNear和zFar指定剪裁平面。fovy的理解如下图所示(来自opengl 投影):
这些参数指定的是一个对称的视见体,如下图所示(图片来自Working with 3D Environment):
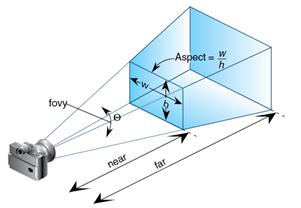
由这些参数,可以得到:
h=near∗tan(θ2)
w=h∗aspect
对应上述透视投影矩阵中:
r=−l,r=w
t=−b,t=h
则得到透视投影矩阵为:
正交投影矩阵的推导
相比于透视投影,正交投影矩阵的推导要简单些,如下图所示:
对于正交投影,有 xp=xe,yp=ye ,因而可以直接利用 xe 与 xn 的映射关系: [l,−1],[r,1] ,利用 ye 和 yn 的映射关系: [b,−1],[t,1] ,以及 ze 和 zn 的映射关系: [−n,−1],[−f,1] 。例如 xe 与 xn 的映射关系表示为如下图所示:

利用 [l,−1],[r,1] 得到:
xn=2r−lxe−r+lr−l(2.1)
同理可得到y,z分量的关系式为:
yn=2t−bye−t+bt−b(2.2)
zn=−2f−nze−f+nf−n(2.3)
对于正交投影而言,w成分是不必要的,保持为1即可,则所求投影矩阵第四行为(0,0,0,1),w保持为1,则NDC坐标和剪裁坐标相同,从而得到正交投影矩阵为:
如果视见体是对称的,即满足
r=−l,t=−b
,则矩阵O可以简化为:
利用平移和旋转推导正交投影矩阵
还可以看做把视见体的中心移动到规范视见体的中心即原点处,然后缩放视见体使得它的每条边长度都为2,进行这一过程的变换表示为:
视口变换矩阵的推导
视变换是将NDC坐标转换为显示屏幕坐标的过程,如下图所示:
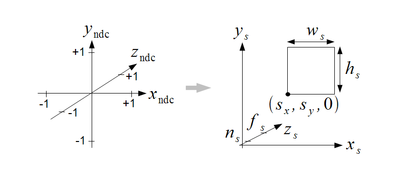
视口变化通过函数:
glViewport(GLint
sx
, GLint
sy
, GLsizei
ws
, GLsizei
hs
);
glDepthRangef(GLclampf
ns
, GLclampf
fs
);
两个函数来指定。其中(
sx
,
sy
)表示窗口的左下角,
ns
和
fs
指定远近剪裁平面到屏幕坐标的映射关系。
使用线性映射关系如下:
(−1,sx),(1,sx+ws)(x分量映射关系)
(−1,sy),(1,sy+hs)(y分量映射关系)
(−1,ns),(1,fs)(z分量映射关系)
求出线性映射函数为:
xs=ws2xn+sx+ws2(3.1)
ys=hs2yn+sy+hs2(3.2)
zs=fs−ns2zn+ns+fs2(3.3)
则由上述式子得到视口变换矩阵为:
Zfighting问题
回过头去看透视投影部分,
zn
与
ze
的关系式1.10:
zn=−f+nf−nze−2fnf−n−ze(1.10)
这是一个非线性关系函数,作图如下:
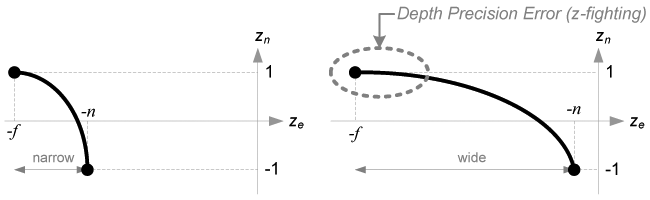
从左边图我们可以看到,在近裁剪平面附近
zn
值变化比较大,精确度较好;而在远裁剪平面附近,有一段距离内,
zn
近乎持平,精确度不好。当增大远近裁剪平面的范围
[−n,−f]
后,如右边图所示,我们看到在远裁剪平面附近,不同相机坐标
ze
对应的
zn
相同,精确度低的现象更为明显,这种深度的精确度引起的问题称之为zFighting。要尽量减小[-n,-f]的范围,以减轻zFighting问题。
本节参考资料
- songho OpenGL Projection Matrix
- GLSL Programming/Vertex Transformations
- glOrtho
- glFrustum
- gluPerspective
相关资源
1.The Perspective and Orthographic Projection Matrix
2.OpenGL 101: Matrices - projection, view, model
3.Calculating the gluPerspective matrix and other OpenGL matrix maths


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









