







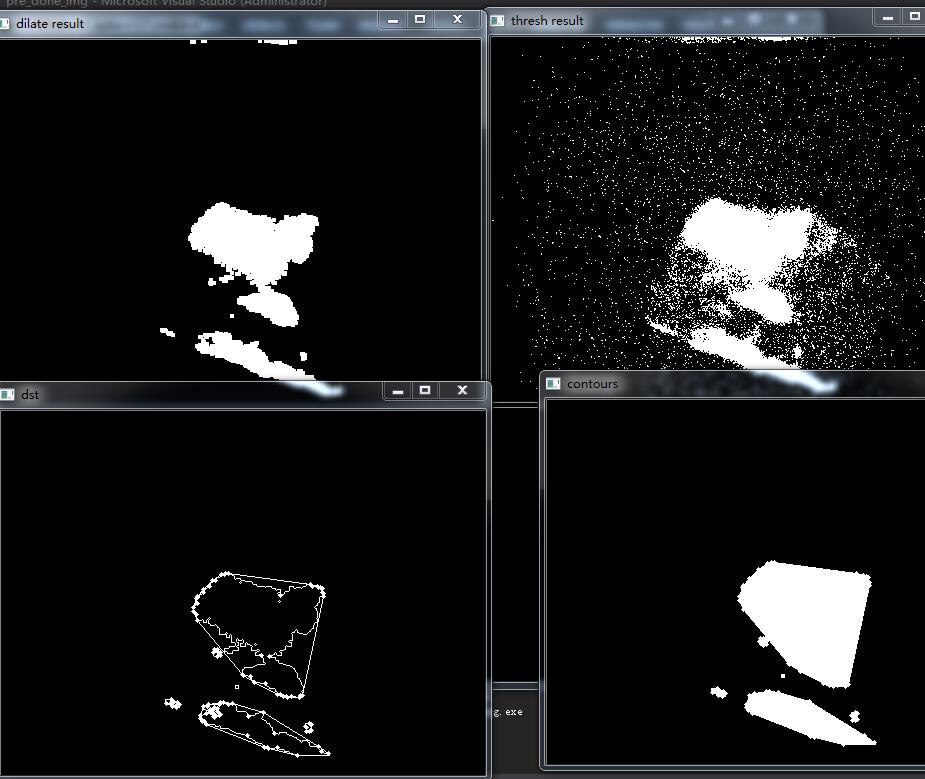
目的:对于很暗很暗的图像 用普通方法不好一下找到轮廓 现在需要找到其最接近的轮廓

#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include <afxwin.h>
#include<fstream>
using namespace std;
using namespace cv;
Mat my_contour(IplImage* dst, IplImage bimgipl)
{
cvZero(dst);
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *contour = NULL, *hull = NULL;
vector<CvPoint> allpoints;
CvContourScanner scanner = cvStartFindContours(&bimgipl, storage);
while ((contour = cvFindNextContour(scanner)) != NULL)
{
cvDrawContours(dst, contour, cv::Scalar(255), cv::Scalar(255), 0);
hull = cvConvexHull2(contour, 0, CV_CLOCKWISE, 0);
CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull, hull->total - 1);
allpoints.push_back(pt0);
for (int i = 0; i < hull->total; ++i)
{
CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull, i);
allpoints.push_back(pt1);
cvLine(dst, pt0, pt1, cv::Scalar(255));
pt0 = pt1;
}
}
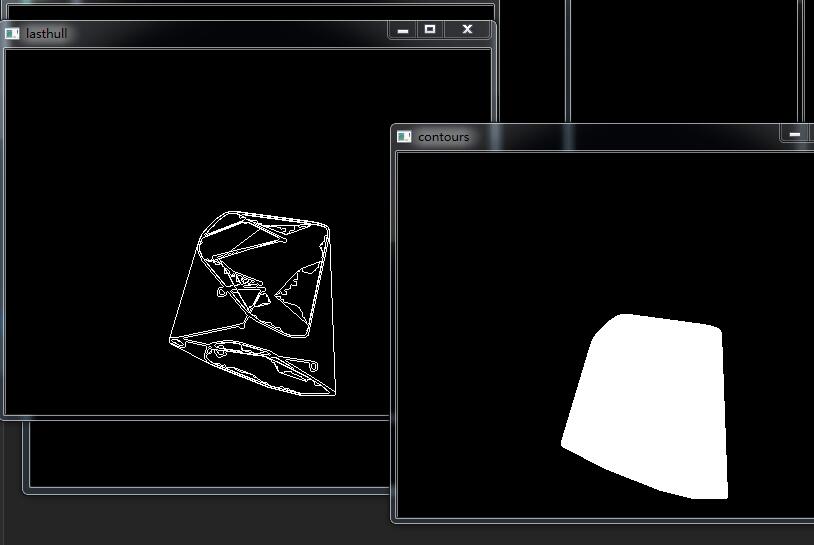
//上面是第一次寻找 可能找到了多个轮廓即有多个凸包 下面存储每个凸包的凸点到容器中 然后将这些点连接起来 这样就有凹陷的地方了 就可以在此基础上寻找最后的凸包了
Mat dstmat(dst, 0);
std::vector<std::vector<cv::Point>> myown_contours;
cv::findContours(dstmat, myown_contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
//判断也许本来就只有一个凸包 就不用存点画线再寻一次凸包了
if (myown_contours.size() > 1)
{
for (int i = 0; i < allpoints.size() - 1; i++)
{
CvPoint firstdot = allpoints[i];
CvPoint secdot = allpoints[i + 1];
cvLine(dst, firstdot, secdot, cv::Scalar(255), 2);
}
CvContourScanner scanner2 = cvStartFindContours(dst, storage);
while ((contour = cvFindNextContour(scanner2)) != NULL)
{
cvDrawContours(dst, contour, cv::Scalar(255), cv::Scalar(255), 0);
hull = cvConvexHull2(contour, 0, CV_CLOCKWISE, 0);
CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull, hull->total - 1);
for (int i = 0; i < hull->total; ++i)
{
CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull, i);
cvLine(dst, pt0, pt1, cv::Scalar(255));
pt0 = pt1;
}
}
}
Mat bimgdst(dst, 0);
std::vector<std::vector<cv::Point>> contours;
cv::findContours(bimgdst, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
Mat contoursimg(bimgdst.size(), CV_8UC1, cv::Scalar(0));
drawContours(contoursimg, contours, -1, Scalar(255), CV_FILLED);
return contoursimg;
}
char filename[100];
char savename[100];
void main()
{
TickMeter tm;
tm.start();
vector<Mat> bgrimgs;
for (int i = 1; i <= 1657; i++)
{
sprintf(filename, "正常图_压缩\\%d.bmp", i);
sprintf(savename, "my_result3\\%d.bmp", i);
Mat img = imread(filename);
//
split(img, bgrimgs);
Mat bimg(img.size(), CV_8UC1, cv::Scalar(0));
bgrimgs[0].copyTo(bimg);
//
threshold(bimg, bimg, 12, 255, CV_THRESH_BINARY/*|CV_THRESH_OTSU*/);
//imshow("thresh result", bimg);
//
Mat element(4, 4, CV_8U, cv::Scalar(1));
morphologyEx(bimg, bimg, cv::MORPH_OPEN, element);
//imshow("dilate result", bimg);
//前20行置0 去除上部分的水滴噪声 后20行也置0 去除下面的噪声
/* //这个置0没有下面写的置0好 用下面的
IplImage bimgipl = bimg;
cvSetImageROI(&bimgipl, cvRect(0, 0, bimg.size().width,20));
IplImage* bimg_front = cvCreateImage(cvSize(bimg.size().width, 20), IPL_DEPTH_8U, 1);
cvCopy(&bimgipl, bimg_front, 0);
cvShowImage("front", bimg_front);
cvSetImageROI(&bimgipl, cvRect(0, bimg.size().height-20, bimg.size().width, 20));
IplImage* bimg_end = cvCreateImage(cvSize(bimg.size().width, 20), IPL_DEPTH_8U, 1);
cvCopy(&bimgipl, bimg_end, 0);
cvShowImage("end", bimg_end);
cvZero(bimg_front);
cvZero(bimg_end);
*/
for (int i = 0; i < 20; i++)
{
uchar* data = bimg.ptr<uchar>(i);
for (int j = 0; j < bimg.size().width; j++)
data[j] = 0;
}
for (int i = bimg.size().height - 19; i < bimg.size().height; i++)
{
uchar* data = bimg.ptr<uchar>(i);
for (int j = 0; j < bimg.size().width; j++)
data[j] = 0;
}
//凸包找轮廓 (我用了2次凸包 中间用线连接 方便第二次凸包 找到完整轮廓)
IplImage mybimgipl = bimg;
IplImage *mydst = cvCreateImage(cvGetSize(&mybimgipl), 8, 1);
Mat myresult(mydst, 0);
myresult = my_contour(mydst, mybimgipl);
imwrite(savename, myresult);
}
tm.stop();
cout << "count=" << tm.getCounter() << ",process time=" << tm.getTimeMilli() << " ms" << endl;
}
done!!!!今天星期五!好开心!!!!!!!!!!!!
关于opencv中找轮廓的 : http://www.cnblogs.com/nktblog/p/4027137.html 写得很棒
给学校我自习室的电脑上装了opencv2.4.13 按照http://blog.csdn.net/dcrmg/article/details/51809614

//
我公司的同事说我这个比较慢 他在网上 https://github.com/abatilo/QuickHull 找到一个快速找凸包的叫我应用进来:于是我重新又写了个:
#include <algorithm>
#include <cmath>
#include <vector>
#include <chrono>
#include <cstdio>
#include <random>
#include <vector>
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
struct myPoint {
int x;
int y;
bool operator<(const myPoint& pt) {
if (x == pt.x)
{
return (y < pt.y);
}
return (x < pt.x);
}
};
// http://stackoverflow.com/questions/1560492/how-to-tell-whether-a-myPoint-is-to-the-right-or-left-side-of-a-line
// A and B are used to define a line
// C is the myPoint whose side we're trying to determine
int SideOfLine(const myPoint &P1, const myPoint &P2, const myPoint &P3) {
return (P2.x - P1.x) * (P3.y - P1.y) - (P2.y - P1.y) * (P3.x - P1.x);
}
// https://en.wikipedia.org/wiki/Distance_from_a_myPoint_to_a_line#Line_defined_by_two_myPoints
float DistanceFromLine(const myPoint &P1, const myPoint &P2, const myPoint &P3) {
return (std::abs((P2.y - P1.y) * P3.x - (P2.x - P1.x) * P3.y + P2.x * P1.y - P2.y * P1.x)
/ std::sqrt((P2.y - P1.y) * (P2.y - P1.y) + (P2.x - P1.x) * (P2.x - P1.x)));
}
// http://stackoverflow.com/questions/13300904/determine-whether-myPoint-lies-inside-triangle
bool myPointInTriangle(const myPoint &p, const myPoint &p1, const myPoint &p2, const myPoint &p3) {
float a = ((p2.y - p3.y) * (p.x - p3.x) + (p3.x - p2.x) * (p.y - p3.y)) / ((p2.y - p3.y) * (p1.x - p3.x) + (p3.x - p2.x) * (p1.y - p3.y));
float b = ((p3.y - p1.y) * (p.x - p3.x) + (p1.x - p3.x) * (p.y - p3.y)) / ((p2.y - p3.y) * (p1.x - p3.x) + (p3.x - p2.x) * (p1.y - p3.y));
float c = 1.0f - a - b;
return (0.0f < a && 0.0f < b && 0.0f < c);
}
// http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html
void FindHull(const std::vector<myPoint> &Sk, const myPoint P, const myPoint Q, std::vector<myPoint> &hullmyPoints) {
// If Sk has no myPoint, then return
if (Sk.size() == 0) return;
std::vector<myPoint> S0;
std::vector<myPoint> S1;
std::vector<myPoint> S2;
// From the given set of myPoints in Sk, find farthest myPoint, say C, from segment PQ
float furthestDistance = 0.0f;
myPoint C;
for (const auto &pt : Sk) {
float distance = DistanceFromLine(P, Q, pt);
if (distance > furthestDistance) {
furthestDistance = distance;
C = pt;
}
}
// Add myPoint C to convex hull at the location between P and Q
hullmyPoints.push_back(C);
/*
* Three myPoints P, Q, and C partition the remaining myPoints of Sk into 3 subsets: S0, S1, and S2
* where S0 are myPoints inside triangle PCQ, S1are myPoints on the right side of the oriented
* line from P to C, and S2 are myPoints on the right side of the oriented line from C to Q.
*/
for (const auto &pt : Sk) {
if (myPointInTriangle(pt, P, C, Q)) {
S0.push_back(pt);
}
else if (0 < SideOfLine(P, C, pt)) {
S1.push_back(pt);
}
else if (0 < SideOfLine(C, Q, pt)) {
S2.push_back(pt);
}
}
FindHull(S1, P, C, hullmyPoints);
FindHull(S2, C, Q, hullmyPoints);
}
// http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html
void QuickHull(const std::vector<myPoint> &s, std::vector<myPoint> &hullmyPoints) {
// Find left and right most myPoints, say A & B, and add A & B to convex hull
myPoint A = s[0];
myPoint B = s[s.size() - 1];
hullmyPoints.push_back(A);
hullmyPoints.push_back(B);
std::vector<myPoint> S1;
std::vector<myPoint> S2;
/*
* Segment AB divides the remaining (n-2) myPoints into 2 groups S1 and S2
* where S1 are myPoints in S that are on the right side of the oriented line from A to B,
* and S2 are myPoints in S that are on the right side of the oriented line from B to A
*/
for (auto it = s.begin() + 1; it != s.end() - 1; ++it) {
const myPoint pt = *it;
const int s1 = SideOfLine(A, B, pt);
const int s2 = SideOfLine(B, A, pt);
if (0 < s1) {
S1.push_back(pt);
}
else if (0 < s2) {
S2.push_back(pt);
}
}
FindHull(S1, A, B, hullmyPoints);
FindHull(S2, B, A, hullmyPoints);
}
Mat mypredone(IplImage* srcipl, vector<Mat> bgrimgs)
{
预处理
Mat img(srcipl, 0);
split(img, bgrimgs);
Mat bimg(img.size(), CV_8UC1, cv::Scalar(0));
bgrimgs[0].copyTo(bimg);
threshold(bimg, bimg, 12, 255, CV_THRESH_BINARY/*|CV_THRESH_OTSU*/);
Mat element(4, 4, CV_8U, cv::Scalar(1));
morphologyEx(bimg, bimg, cv::MORPH_OPEN, element);
for (int i = 0; i < 20; i++)
{
uchar* data = bimg.ptr<uchar>(i);
for (int j = 0; j < bimg.size().width; j++)
data[j] = 0;
}
//for (int i = bimg.size().height - 19; i < bimg.size().height; i++)
//{
// uchar* data = bimg.ptr<uchar>(i);
// for (int j = 0; j < bimg.size().width; j++)
// data[j] = 0;
//}
return bimg;
}
IplImage* luobin_findcontour(Mat bimg)
{
IplImage mybimgipl = bimg;
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *contour = NULL, *hull = NULL;
vector<CvPoint> allpoints;
vector<myPoint> myallpoints;
CvContourScanner scanner = cvStartFindContours(&mybimgipl, storage);
while ((contour = cvFindNextContour(scanner)) != NULL)
{
hull = cvConvexHull2(contour, 0, CV_CLOCKWISE, 0);
CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull, hull->total - 1);
myPoint mypt0;
mypt0.x = (float)pt0.x;
mypt0.y = (float)pt0.y;
mypt0.operator<(mypt0);
allpoints.push_back(pt0);
myallpoints.push_back(mypt0);
for (int i = 0; i < hull->total; ++i)
{
CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull, i);
allpoints.push_back(pt1);
//cvLine(mydst, pt0, pt1, cv::Scalar(255));
//pt0 = pt1;
myPoint mypt1;
mypt1.x = (float)pt1.x;
mypt1.y = (float)pt1.y;
mypt1.operator<(mypt1); //
myallpoints.push_back(mypt1);
}
}
std::sort(myallpoints.begin(), myallpoints.end());
std::vector<myPoint> myhullPoints;
QuickHull(myallpoints, myhullPoints);
CvSeq *hull2 = NULL;
CvSeq* ptseq = cvCreateSeq(CV_SEQ_KIND_GENERIC | CV_32SC2, sizeof(CvContour), sizeof(CvPoint), storage);
for (int i = 0; i < myhullPoints.size(); ++i)
{
myPoint pt1 = myhullPoints[i];
CvPoint myfinalpot1;
myfinalpot1.x = pt1.x;
myfinalpot1.y = pt1.y;
cvSeqPush(ptseq, &myfinalpot1);
}
hull2 = cvConvexHull2(ptseq, 0, CV_CLOCKWISE, 1);
IplImage *mydst3 = cvCreateImage(cvGetSize(&mybimgipl), 8, 1);
cvZero(mydst3);
cvDrawContours(mydst3, hull2, CV_RGB(255, 255, 255), CV_RGB(255, 255, 255), -1, CV_FILLED, 8);
return mydst3;
}
char filename[100];
char newcontour[100];
void main()
{
IplImage* src_ipl = cvLoadImage("12.bmp");
cvShowImage("srcimage", src_ipl);
vector<Mat> bgrimgs;
Mat bimg = mypredone(src_ipl, bgrimgs);
IplImage* luobin_result = luobin_findcontour(bimg);
cvShowImage("luobin result2", luobin_result);
waitKey(0);
/*
TickMeter tm;
tm.start();
for (int i = 55124; i <= 56460; i++)
{
int newi = i - 55123;
sprintf(filename, "背面图\\%d.bmp", i);
sprintf(newcontour, "罗彬背面轮廓\\%d.bmp", newi);
IplImage* src_ipl = cvLoadImage(filename);
vector<Mat> bgrimgs;
Mat bimg = mypredone(src_ipl, bgrimgs);
IplImage* luobin_result = luobin_findcontour(bimg);
cvSaveImage(newcontour, luobin_result);
}
tm.stop();
cout << "count=" << tm.getCounter() << ",process time=" << tm.getTimeMilli() << endl;
*/
}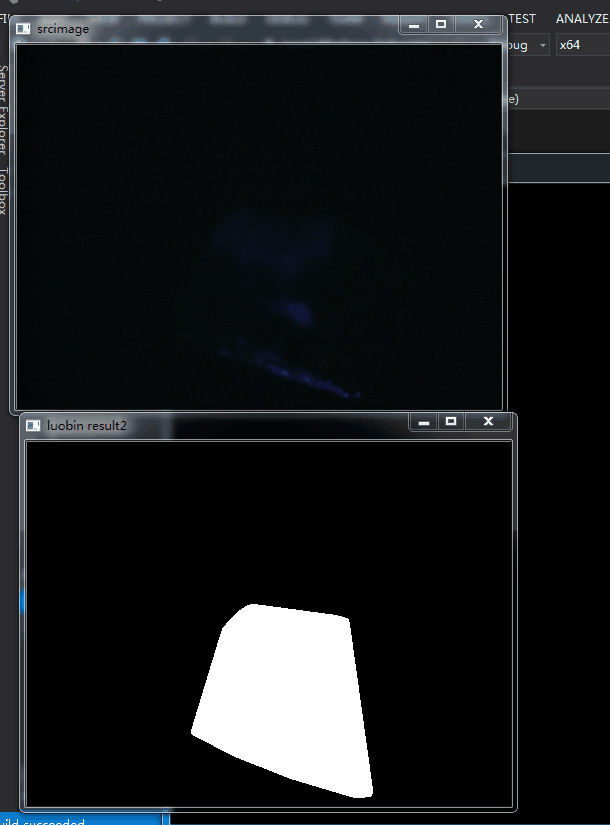 和上面我自己的算法是同一张原图 的确比我的快了将近一倍!
和上面我自己的算法是同一张原图 的确比我的快了将近一倍!
但对带噪声的图,直接用上面这个快速凸包寻找轮廓的办法就不行:
我把原图、灰度图、上面这个快速凸包找轮廓的图、我后一篇自己写的结果图 对比了一下:
char filename[100];
char newcontour[100];
char grayimg[100];
char myback[100];
char contrast[100];
void main()
{
TickMeter tm;
tm.start();
CvSize mysize = cvSize(484 * 4, 364);
for (int i = 1; i <= 1337; i++)
{
sprintf(filename, "背面图\\%d.bmp", i);
sprintf(newcontour, "罗彬背面轮廓\\%d.bmp", i);
sprintf(grayimg, "背面灰度\\%d.bmp", i);
sprintf(myback, "我的背面轮廓\\%d.bmp", i);
sprintf(contrast, "背面对比图\\%d.bmp", i);
IplImage* left = cvLoadImage(filename);
IplImage* combine = cvCreateImage(mysize, left->depth, left->nChannels);
cvZero(combine);
cvSetImageROI(combine, cvRect(0, 0, left->width, left->height));
cvCopy(left, combine);
cvResetImageROI(combine);
IplImage* right = cvLoadImage(grayimg);
cvSetImageROI(combine, cvRect(483, 0, right->width, right->height));
cvCopy(right, combine);
cvResetImageROI(combine);
IplImage* right2 = cvLoadImage(newcontour);
cvSetImageROI(combine, cvRect(484*2-1, 0, right2->width, right2->height));
cvCopy(right2, combine);
cvResetImageROI(combine);
IplImage* right3 = cvLoadImage(myback);
cvSetImageROI(combine, cvRect(484 * 3 - 1, 0, right3->width, right3->height));
cvCopy(right3, combine);
cvResetImageROI(combine);
cvSaveImage(contrast, combine);
}
tm.stop();
cout << "count=" << tm.getCounter() << ",process time=" << tm.getTimeMilli() << endl;
}

最终改成了:
#include <algorithm>
#include <cmath>
#include <vector>
#include <chrono>
#include <cstdio>
#include <random>
#include <vector>
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
struct myPoint {
int x;
int y;
bool operator<(const myPoint& pt) {
if (x == pt.x)
{
return (y < pt.y);
}
return (x < pt.x);
}
};
// http://stackoverflow.com/questions/1560492/how-to-tell-whether-a-myPoint-is-to-the-right-or-left-side-of-a-line
int SideOfLine(const myPoint &P1, const myPoint &P2, const myPoint &P3) {
return (P2.x - P1.x) * (P3.y - P1.y) - (P2.y - P1.y) * (P3.x - P1.x);
}
// https://en.wikipedia.org/wiki/Distance_from_a_myPoint_to_a_line#Line_defined_by_two_myPoints
float DistanceFromLine(const myPoint &P1, const myPoint &P2, const myPoint &P3) {
return (std::abs((P2.y - P1.y) * P3.x - (P2.x - P1.x) * P3.y + P2.x * P1.y - P2.y * P1.x)
/ std::sqrt((P2.y - P1.y) * (P2.y - P1.y) + (P2.x - P1.x) * (P2.x - P1.x)));
}
// http://stackoverflow.com/questions/13300904/determine-whether-myPoint-lies-inside-triangle
bool myPointInTriangle(const myPoint &p, const myPoint &p1, const myPoint &p2, const myPoint &p3) {
float a = ((p2.y - p3.y) * (p.x - p3.x) + (p3.x - p2.x) * (p.y - p3.y)) / ((p2.y - p3.y) * (p1.x - p3.x) + (p3.x - p2.x) * (p1.y - p3.y));
float b = ((p3.y - p1.y) * (p.x - p3.x) + (p1.x - p3.x) * (p.y - p3.y)) / ((p2.y - p3.y) * (p1.x - p3.x) + (p3.x - p2.x) * (p1.y - p3.y));
float c = 1.0f - a - b;
return (0.0f < a && 0.0f < b && 0.0f < c);
}
// http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html
void FindHull(const std::vector<myPoint> &Sk, const myPoint P, const myPoint Q, std::vector<myPoint> &hullmyPoints) {
if (Sk.size() == 0) return;
std::vector<myPoint> S0;
std::vector<myPoint> S1;
std::vector<myPoint> S2;
float furthestDistance = 0.0f;
myPoint C;
for (const auto &pt : Sk) {
float distance = DistanceFromLine(P, Q, pt);
if (distance > furthestDistance) {
furthestDistance = distance;
C = pt;
}
}
hullmyPoints.push_back(C);
for (const auto &pt : Sk) {
if (myPointInTriangle(pt, P, C, Q)) {
S0.push_back(pt);
}
else if (0 < SideOfLine(P, C, pt)) {
S1.push_back(pt);
}
else if (0 < SideOfLine(C, Q, pt)) {
S2.push_back(pt);
}
}
FindHull(S1, P, C, hullmyPoints);
FindHull(S2, C, Q, hullmyPoints);
}
// http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html
void QuickHull(const std::vector<myPoint> &s, std::vector<myPoint> &hullmyPoints) {
myPoint A = s[0];
myPoint B = s[s.size() - 1];
hullmyPoints.push_back(A);
hullmyPoints.push_back(B);
std::vector<myPoint> S1;
std::vector<myPoint> S2;
for (auto it = s.begin() + 1; it != s.end() - 1; ++it) {
const myPoint pt = *it;
const int s1 = SideOfLine(A, B, pt);
const int s2 = SideOfLine(B, A, pt);
if (0 < s1) {
S1.push_back(pt);
}
else if (0 < s2) {
S2.push_back(pt);
}
}
FindHull(S1, A, B, hullmyPoints);
FindHull(S2, B, A, hullmyPoints);
}
Mat mypredone(IplImage* srcipl, vector<Mat> bgrimgs)
{
预处理
Mat img(srcipl, 0);
split(img, bgrimgs);
Mat bimg(img.size(), CV_8UC1, cv::Scalar(0));
bgrimgs[0].copyTo(bimg);
threshold(bimg, bimg, 10, 255, CV_THRESH_BINARY/*|CV_THRESH_OTSU*/);
Mat element(4, 4, CV_8U, cv::Scalar(1));
morphologyEx(bimg, bimg, cv::MORPH_OPEN, element);
//for (int i = 0; i < 20; i++)
//{
// uchar* data = bimg.ptr<uchar>(i);
// for (int j = 0; j < bimg.size().width; j++)
// data[j] = 0;
//}
//for (int i = bimg.size().height - 19; i < bimg.size().height; i++)
//{
// uchar* data = bimg.ptr<uchar>(i);
// for (int j = 0; j < bimg.size().width; j++)
// data[j] = 0;
//}
return bimg;
}
//背面quickhull 去除溜槽走光点等噪声
IplImage* luobin_backcontour(Mat bimg)
{
IplImage mybimgipl = bimg;
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *contour = NULL, *hull = NULL;
vector<CvPoint> allpoints;
vector<myPoint> myallpoints;
CvContourScanner scanner = cvStartFindContours(&mybimgipl, storage);
while ((contour = cvFindNextContour(scanner)) != NULL)
{
/去掉溜槽走光点的 想法
CvMoments *moments = (CvMoments*)malloc(sizeof(CvMoments));
cvMoments(contour, moments, 1);
double moment10 = cvGetSpatialMoment(moments, 1, 0);
double moment01 = cvGetSpatialMoment(moments, 0, 1);
double area = cvGetSpatialMoment(moments, 0, 0);
double posX = moment10 / area;
double posY = moment01 / area;
double mylenth = cvArcLength(contour);
double myarea = cvContourArea(contour);
//cout << "length=" << mylenth << " area=" << myarea << " 重心: " << "(" << posX << " , " << posY << ")" << " " << endl;
//center light
if (posX > double(236.0) && posX<double(243.0) && posY>double(171.0) && posY<double(197.0) && myarea<double(141) && mylenth < double(71))
{
cvSubstituteContour(scanner, NULL);
continue;
}
//right light
if (posX > double(384.0) && posX<double(395.0) && posY>double(90.0) && posY<double(113.0) && myarea<double(316) && mylenth < double(90))
{
cvSubstituteContour(scanner, NULL);
continue;
}
//below
if (posX >160.0 && posX<331.0 && posY>295.0 && posY < 362.0 && myarea < 170 && mylenth < 100)
{
cvSubstituteContour(scanner, NULL);
continue;
}
if (posX >212.0 && posX<251.0 && posY>248.0 && posY < 269.0 && myarea < 21 && mylenth < 20)
{
cvSubstituteContour(scanner, NULL);
continue;
}
if (posX >256.0 && posX<271.0 && posY>296.0 && posY < 299.5 && myarea < 25 && mylenth < 20)
{
cvSubstituteContour(scanner, NULL);
continue;
}
if (posX >210.0 && posX<215.0 && posY>350.0 && posY < 358.0 && myarea < 250 && mylenth < 100)
{
cvSubstituteContour(scanner, NULL);
continue;
}
// special
if (myarea == 0)
{
cvSubstituteContour(scanner, NULL);
continue;
}
///
hull = cvConvexHull2(contour, 0, CV_CLOCKWISE, 0);
CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull, hull->total - 1);
myPoint mypt0;
mypt0.x = (float)pt0.x;
mypt0.y = (float)pt0.y;
allpoints.push_back(pt0);
myallpoints.push_back(mypt0);
for (int i = 0; i < hull->total; ++i)
{
CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull, i);
allpoints.push_back(pt1);
myPoint mypt1;
mypt1.x = (float)pt1.x;
mypt1.y = (float)pt1.y;
myallpoints.push_back(mypt1);
}
}
std::sort(myallpoints.begin(), myallpoints.end());
std::vector<myPoint> myhullPoints;
QuickHull(myallpoints, myhullPoints);
CvSeq *hull2 = NULL;
CvSeq* ptseq = cvCreateSeq(CV_SEQ_KIND_GENERIC | CV_32SC2, sizeof(CvContour), sizeof(CvPoint), storage);
for (int i = 0; i < myhullPoints.size(); ++i)
{
myPoint pt1 = myhullPoints[i];
CvPoint myfinalpot1;
myfinalpot1.x = pt1.x;
myfinalpot1.y = pt1.y;
cvSeqPush(ptseq, &myfinalpot1);
}
hull2 = cvConvexHull2(ptseq, 0, CV_CLOCKWISE, 1);
IplImage *mydst3 = cvCreateImage(cvGetSize(&mybimgipl), 8, 1);
cvZero(mydst3);
cvDrawContours(mydst3, hull2, CV_RGB(255, 255, 255), CV_RGB(255, 255, 255), -1, CV_FILLED, 8);
return mydst3;
}
//正面quickhull
IplImage* luobin_frontcontour(Mat bimg)
{
IplImage mybimgipl = bimg;
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *contour = NULL, *hull = NULL;
vector<CvPoint> allpoints;
vector<myPoint> myallpoints;
CvContourScanner scanner = cvStartFindContours(&mybimgipl, storage);
while ((contour = cvFindNextContour(scanner)) != NULL)
{
hull = cvConvexHull2(contour, 0, CV_CLOCKWISE, 0);
CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull, hull->total - 1);
myPoint mypt0;
mypt0.x = (float)pt0.x;
mypt0.y = (float)pt0.y;
allpoints.push_back(pt0);
myallpoints.push_back(mypt0);
for (int i = 0; i < hull->total; ++i)
{
CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull, i);
allpoints.push_back(pt1);
myPoint mypt1;
mypt1.x = (float)pt1.x;
mypt1.y = (float)pt1.y;
myallpoints.push_back(mypt1);
}
}
std::sort(myallpoints.begin(), myallpoints.end());
std::vector<myPoint> myhullPoints;
QuickHull(myallpoints, myhullPoints);
CvSeq *hull2 = NULL;
CvSeq* ptseq = cvCreateSeq(CV_SEQ_KIND_GENERIC | CV_32SC2, sizeof(CvContour), sizeof(CvPoint), storage);
for (int i = 0; i < myhullPoints.size(); ++i)
{
myPoint pt1 = myhullPoints[i];
CvPoint myfinalpot1;
myfinalpot1.x = pt1.x;
myfinalpot1.y = pt1.y;
cvSeqPush(ptseq, &myfinalpot1);
}
hull2 = cvConvexHull2(ptseq, 0, CV_CLOCKWISE, 1);
IplImage *mydst3 = cvCreateImage(cvGetSize(&mybimgipl), 8, 1);
cvZero(mydst3);
cvDrawContours(mydst3, hull2, CV_RGB(255, 255, 255), CV_RGB(255, 255, 255), -1, CV_FILLED, 8);
return mydst3;
}
char filename[100];
char newcontour[100];
char grayimg[100];
char myback[100];
char contrast[100];
void main()
{
TickMeter tm;
tm.start();
for (int i = 1; i <= 1337; i++)
{
//背面找轮廓
sprintf(filename, "背面图\\%d.bmp", i);
sprintf(newcontour, "罗彬背面轮廓3\\%d.bmp", i);
IplImage* src_ipl = cvLoadImage(filename);
vector<Mat> bgrimgs;
Mat bimg = mypredone(src_ipl, bgrimgs);
IplImage* luobin_result = luobin_backcontour(bimg);
cvSaveImage(newcontour, luobin_result);
正面找轮廓
sprintf(filename, "正面图\\%d.bmp", i);
sprintf(newcontour, "罗彬正面轮廓\\%d.bmp", i);
IplImage* src_ipl = cvLoadImage(filename);
vector<Mat> bgrimgs;
Mat bimg = mypredone(src_ipl, bgrimgs);
IplImage* luobin_result = luobin_frontcontour(bimg);
}
tm.stop();
cout << "count=" << tm.getCounter() << ",process time=" << tm.getTimeMilli() << endl;
}















 748
748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











