







关于PBN、RNAV和RNP,我认为最难区分的是PBN和RNP,翻译过来太像了。看了很多文章,感觉不是很尽兴,于是,根据自己的理解结合规章规范总结了一下,希望能用直白的语言把它说明,破除行业专业术语屏蔽。理解不当之处,请大家指出。
1 导航的概念与发展
最开始飞机的导航是基于传统陆基导航的(当然我说的这个开始还够早),主要依靠地面导航台,在陆地上使用甚高频全向无线电信标(VOR)和测距仪(DME),在洋区飞行则采用惯性导航系统(INS)。但随着航空的发展,发现空域不够用了,而且这种导航方式很麻烦必须飞折线,于是导航概念就有了新的发展,导航概念的发展基于两个重要原因:
- 传统的陆基导航依靠导航台(NDB、VOR、DME),受地形、气象、导航台定位容差限制较大,只能沿着导航台折线飞行。增加了航线路程的同时,受地形限制,需要更多的导航台等设施。
- 航空的不断发展需要越来越大的空域容量,因而凸显了最优利用可用空域的迫切性。
于是,PBN概念产生了(和传统导航的区别如下图),它让飞机可以不需要再沿着导航台进行折线飞行。根据精度、对机载系统要求的不同,PBN有两种:RNAV和RNP,可以简单地认为PBN=RNAV+RNP。
| 传统导航 | 区域导航(PBN) | |
|---|---|---|
| 航路结构 | 电台-逐台飞行 | 航路点:自定义任何地理位置点 |
| 导航设施 | NDB、VOR、DME | VOR、DME、INS、GNSS |
| 机载设备 | 无线电导航接收机 | 导航传感器+RNAV计算机+导航数据库 |
| 定位 | 相对法:相对于电台 | 绝对法:地理坐标 |
| 导航计算 | 在地图投影面上计算 | 在大圆航线上计算 |
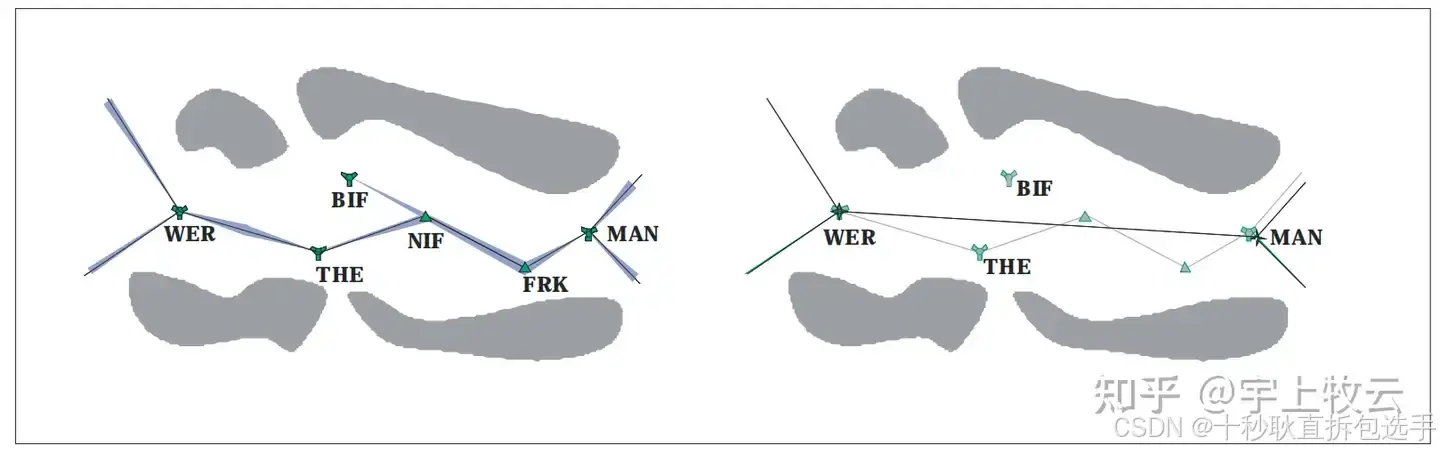
传统陆基导航与基于性能导航(PBN)的区别
- 区域导航(RNAV, Regional Area Navigation):一种导航方式,允许航空器在地面导航设备覆盖范围内,或在机载自主导航设备的 工作范围之内,或者二者的组合,沿任一期望的航径飞行。RNAV 系统可以作为飞行管理系统 (FMS) 的一部分。
- 所需性能导航(RNP, Required Navigation):具有机载导航性能监视和告警能力的RNAV,RNP类型根据飞机至少95%的时间内预计能达到的导航性能精度的数值来确定。
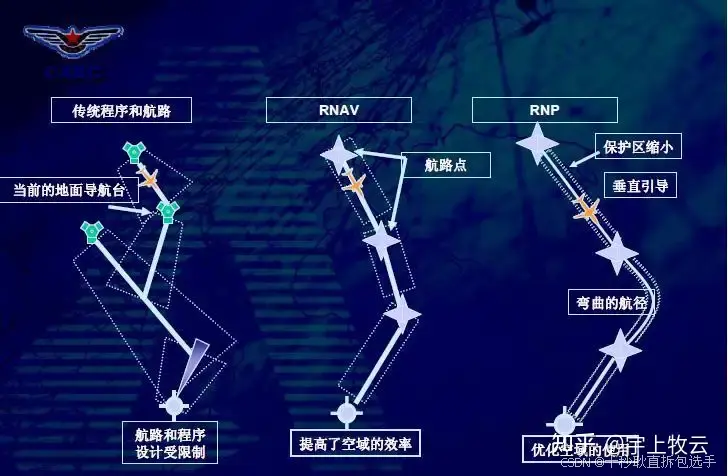
传统导航、RNAV与RNP
PBN概念不是单独提出的,是基于对空域概念的理解。也就是说,导航概念的升级是基于对空域概念、空域运行场景的设计产生的。(这里为什么提空域概念/PBN概念,是因为这有助于理解RNAV和RNP的区别,因为在空域里,导航和监视是有很强的关联性的)。
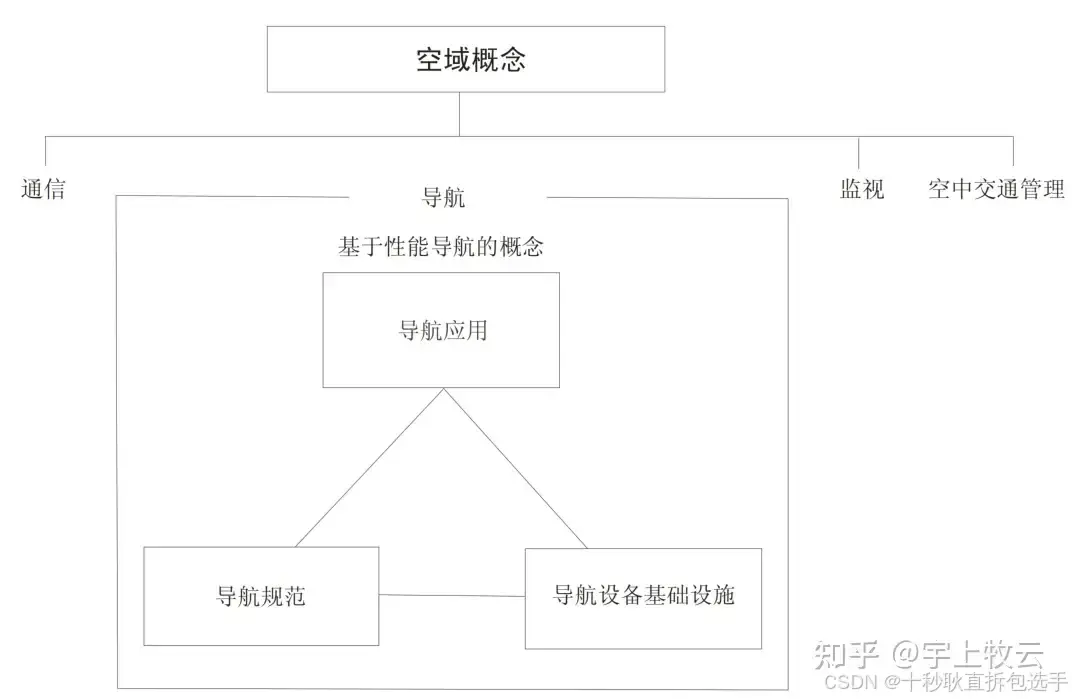
PBN概念
2 RNAV和RNP的区别在哪里
那么,RNAV和RNP的区别在哪里?非常遗憾,除了下面这几点区别,我还是没弄清楚。
| RNAV | RNP | |
| 导航源 | GNSS DME | GNSS |
| 最高精度 | RNAV 1 | RNP 0.3 |
| 机载设备要求 | 机载性能监视和告警要求 |
在机载性能监视和告警要求上,RNAV和RNP各方面均有差异。
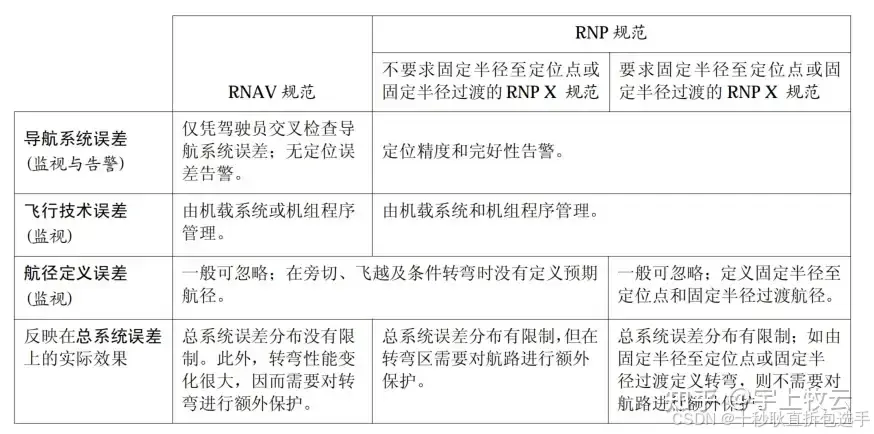
RNP 的性能监视与告警要求
3 导航应用
PBN 概念由 3 个相互关联的要素组成:导航规范、导航系统基础设施和导航应用。
针对不同的场景/运行阶段,如离场、航路、洋区、进近、偏远陆地等,可应用不同的PBN。
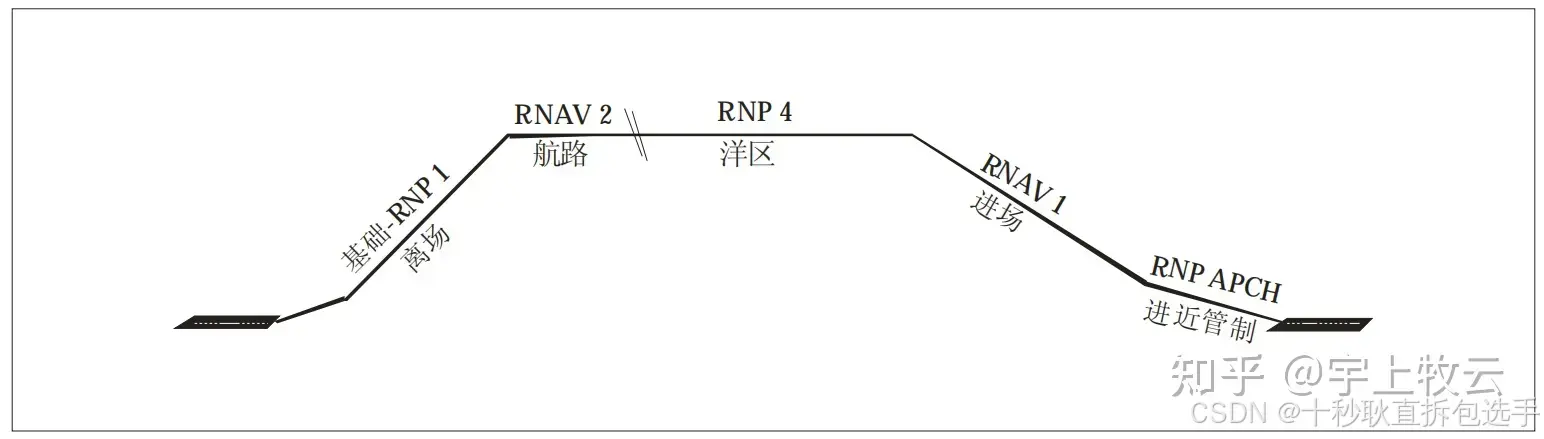 导航应用举例
导航应用举例
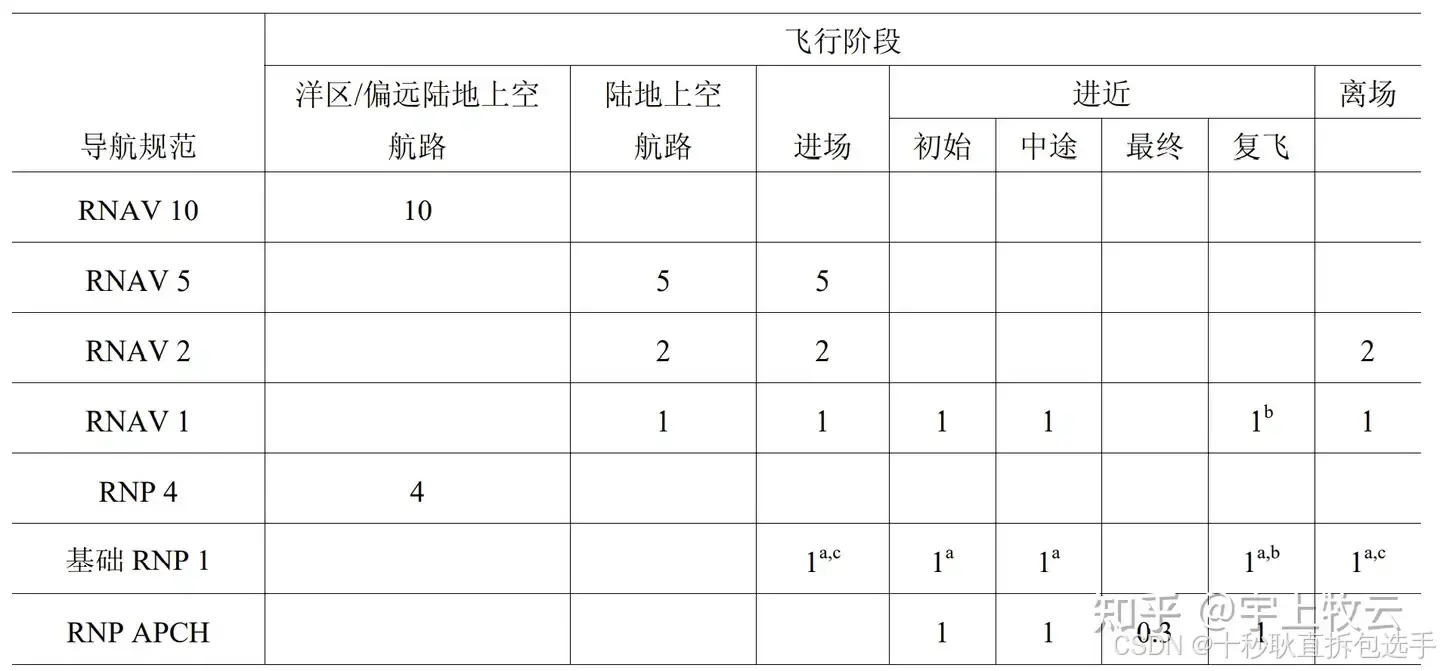 导航应用阶段
导航应用阶段
- 备注:
- a. 该导航应用仅限用于标准仪表进场和标准仪表离场。
- b. 应用范围仅限于复飞进近阶段的初始爬升之后。
- c. 距机场基准点 (ARP) 30 海里以外,精度告警门限变为 2 海里。
- d. RNAV 10≈ RNP 10,但是RNAV10不要求机载性能监视与告警。
备注:
GNSS, Global Navigation Satellite System,全球导航卫星系统
NDB, Non-Directional Beacon, 无向信标导航台
NDB, Navigation Data Base, 导航数据库
DME, Distance Measuring Equipment, 测距仪
INS, Inertial Navigation System, 惯性导航系统
VOR, Very High Frequency Omnirange Station, 甚高频全向无线电信标
ILS, Instrument Landing System, 仪表着陆系统

















 6103
6103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









