






 本文介绍了AI时代的云机器人实验平台,它允许学生远程控制实体机器人,实现SLAM建图和实时视频反馈。平台不绑定特定机器人,支持多种机器人技术和实验课程,如ROS编程、机器人感知、运动控制等,旨在提升学生的智能控制实践能力。
本文介绍了AI时代的云机器人实验平台,它允许学生远程控制实体机器人,实现SLAM建图和实时视频反馈。平台不绑定特定机器人,支持多种机器人技术和实验课程,如ROS编程、机器人感知、运动控制等,旨在提升学生的智能控制实践能力。
你是否曾经羡慕过武侠电影中飞檐走壁的武功?是否好奇过神秘莫测的机关暗器背后是谁在操控?AI时代,技术超越想象,一起来看机器人背后隐遁于无形的“奇门遁甲”之术。
希冀云端机器人与智能控制实验平台创意推出,虚实结合的云机器人实验平台环境,圆你远程控制的“武侠”之梦!
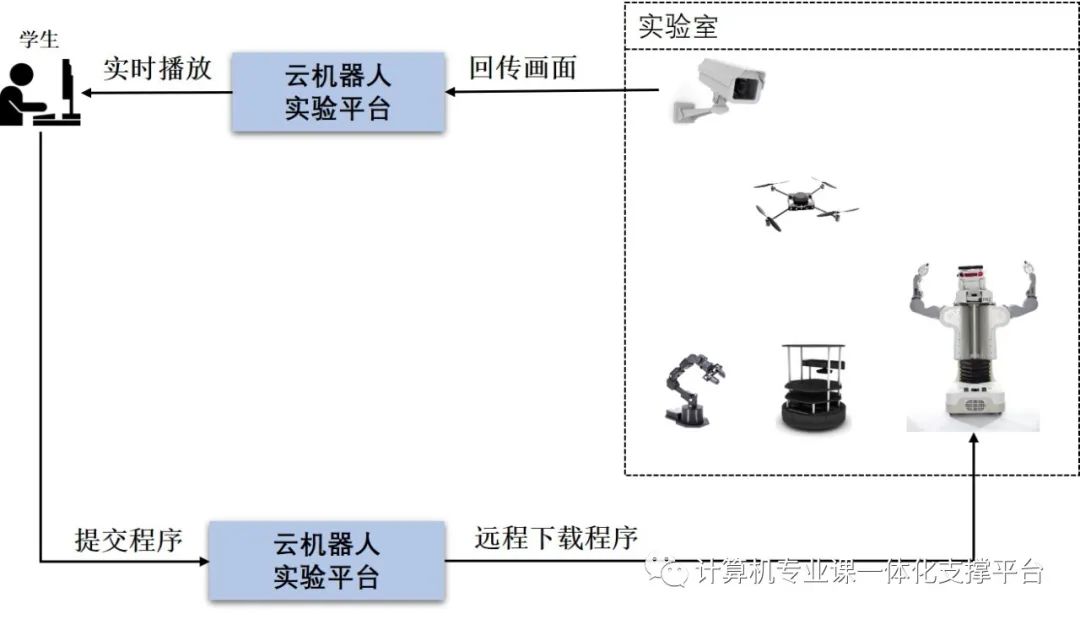
在实体机器人上远程运行程序
在实验环境中,学生可远程连接线下的实体机器人。学生在仿真实验环境中编写的程序和训练的模型,可通过网络远程下载到位于实验室的实体机器人的下位机中,控制机器人的运行。以下视频为云机器人实验环境中SLAM建图的过程:
实体机器人运行过程实时播放
采用网络摄像头拍摄实体机器人现场运行画面,并将画面传送到学生的桌面实验环境中播放。学生通过命令下载代码后,可直接在桌面实验环境中观察到实体机器人的实时运行状态。以下视频为SLAM导航的实验效果,左上角小屏可观察真实运行并回传的视频:
不绑定不依赖特定实体机器人
云机器人实验平台不绑定、不依赖任何特定实体机器人,可对接高校实验室现有实体机器人。教师可将实体机器人仿真模型导入云桌面后,一键保存生成自定义的实验环境。然后,可以在自定义的实验环境上构建虚拟结合的课程实验体系。
面向提升学生智能控制与机器人工程实践能力的实验体系,提供多门实验课程,包括但不限于:
ROS编程与实践。
机器人系统仿真。
机器人运动控制。
机器人感知系统。
机器人运动规划。
机器人自主导航。
机械臂智能控制。
无人机智能飞行控制。
自动驾驶。
无人小车智能控制。
是不是摩拳擦掌想要试一试了呢?部分课程与实验如下表所示,你想要试试哪一个呢?赶紧联系我们申请吧!
课程 | 实验名称 | 实验难度 | 实验学时 | 实验环境 | 实验手册 | 实验代码 |
ROS编程与实践 | ROS入门 | ⭐️⭐️⭐️ | 2 | √ | √ | √ |
ROS文件系统 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
ROS节点 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
ROS话题 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
ROS服务 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
ROS消息发布与订阅 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
ROS服务与客户端 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
roscpp程序设计 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
rospy程序设计 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
TF坐标转换 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
数据录制与回放 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
… | … | … | … | … | … | |
机器人系统仿真 | Gazebo仿真环境的使用 | ⭐️⭐️⭐️ | 4 | √ | √ | √ |
RViz可视化平台的使用 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
MoveIt!运动控制平台的使用 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
OpenAI Gym强化学习平台的使用 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
Mujoco机器人仿真环境的使用 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
Rotors Simulator无人机仿真环境的使用 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
Unity仿真环境的使用 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
URDF机器人建模 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
URDF机器人模型优化 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
机器人运动控制 | 位置方位与坐标系 | ⭐️⭐️ | 2 | √ | √ | √ |
齐次坐标系转换 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
运行学建模 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
正向运动学求解 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
逆向运动学求解 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
脉宽调制PWM | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
PID控制算法 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
机器人感知系统 | 位置感知 | ⭐️⭐️⭐️ | 2 | √ | √ | √ |
红外感知 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
速度感知 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
姿态感知 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
语音感知 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
视觉感知 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
机器人运动规划 | 轨迹规划 | ⭐️⭐️⭐️ | 4 | √ | √ | √ |
路径规划 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
智能规划 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
机器人自主导航 | SLAM地图系统 | ⭐️⭐️⭐️ | 2 | √ | √ | √ |
基于激光雷达的SLAM地图构建 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
基于激光雷达的自主导航 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
基于三维视觉的SLAM地图构建 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
基于三维视觉的自主导航 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
机械臂智能控制 | 机械臂仿真环境介绍 | ⭐️⭐️ | 2 | √ | √ | √ |
MoveIt!机械臂仿真 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
机械臂运动规划 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
机械臂语音感知与控制 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
机械臂视觉感知与控制 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
机械臂智能抓取 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
无人机智能飞行控制 | 无人机智能避障 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ |
无人机智能导航 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机姿态调整 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机飞行规划 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机目标打击 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机语音控制飞行 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机视觉控制与导航 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
无人机与强化学习实践 | ⭐️⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
自动驾驶 | 目标检测 | ⭐️⭐️⭐️ | 4 | √ | √ | √ |
物体跟踪 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
视觉定位 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
车道检测与识别 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
智能泊车 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
交通标志识别 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
行人识别 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
周围车辆识别 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
天气感知 | ⭐️⭐️⭐️ | 4 | √ | √ | √ | |
路径规划 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
… | … | … | … | … | … | |
无人小车智能控制 | Unity仿真环境介绍 | ⭐️⭐️ | 2 | √ | √ | √ |
无人驾驶小车控制 | ⭐️⭐️ | 2 | √ | √ | √ | |
摄像头数据采集 | ⭐️⭐️ | 2 | √ | √ | √ | |
无人驾驶模型搭建与训练 | ⭐️⭐️⭐️⭐️ | 4 | √ | √ | √ | |
训练模型控制的无人驾驶 | ⭐️⭐️⭐️ | 2 | √ | √ | √ | |
… | … | … | … | … | … | |
智能控制与机器人综合应用案例 | 机械臂跳舞 | ⭐️⭐️⭐️⭐️⭐️ | 8 | √ | √ | √ |
移动机械臂物体智能分拣 | ⭐️⭐️⭐️⭐️⭐️ | 8 | √ | √ | √ | |
酒店机器人送餐系统 | ⭐️⭐️⭐️⭐️⭐️ | 8 | √ | √ | √ | |
无人机编队飞行 | ⭐️⭐️⭐️⭐️⭐️ | 8 | √ | √ | √ | |
… | … | … | … | … | … |
更多精彩,敬请关注www.educg.net!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









