







边缘检测
canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化。
canny边缘检测器算法基本步骤:
平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声。
计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直、水平和斜对角。这一步的输出用于在下一步中计算真正的边缘。
非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于边缘)。这是一种边缘细化技术,用最急剧的变换选出边缘点。
用滞后阈值化选择边缘:最后一步,检查某一条边缘是否明显到足以作为最终输出,最后去除所有不明显的边缘。
opencv使用canny边缘检测相对简单,代码如下:
import cv2
import numpy as np
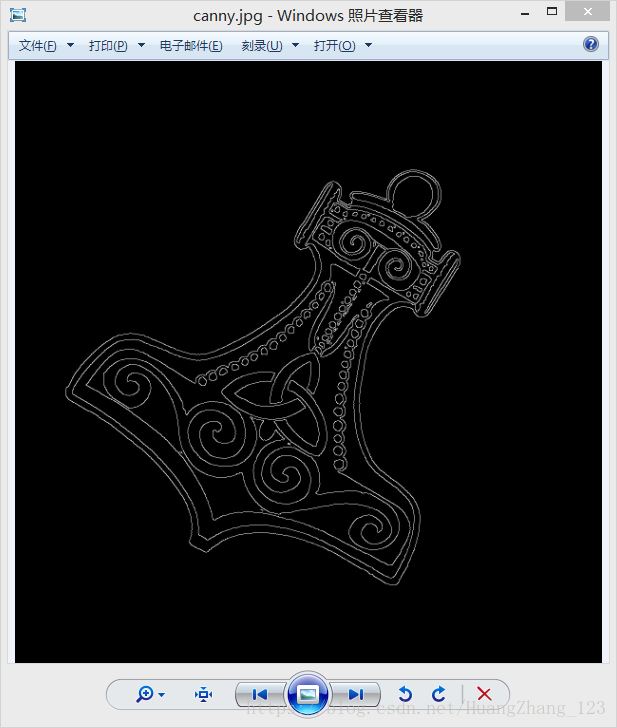
img = cv2.imread("hammer.jpg", 0)
cv2.imwrite("canny.jpg", cv2.canny(img, 200, 300))
cv2.imshow("canny", cv2.imread("canny.jpg"))
cv2.waitkey()
cv2.destroyallwindows()
运行结果:
canny函数的原型为
cv2.canny(image, threshold1, threshold2[, edges[, aperturesize[, l2gradient ]]])
必要参数:
第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
第二个参数是滞后阈值1;
第三个参数是滞后阈值2。
轮廓检测
轮廓检测主要由cv2.findcontours函数实现的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2561
2561











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









