






Lecture 14:Regularization
Regularized Hypothesis Set
当训练样本数不够多,而假设函数次数比较高时,很容易发生过拟合,正则化的目的就是希望让高维的假设函数退化成低维的假设函数

如上图,高维假设函数的参数里,高阶项对应的参数(w3,...,w10)就都被限制为0了
如果我们希望把\(\mathcal H_{10}\)退化为\(\mathcal H_{2}\),加正则化的优化目标变成了:
\[\arg \min_{w\in \mathbb R^{10+1}} E_{in}(w)\]
\[\mathrm{s.t.}\ \ w_3=\cdots=w_{10}=0\]
这样做看起来是多此一举,直接用\(\mathcal H_2\)不就好了?实际上这是为后面的工作作铺垫。
现在我们要对这个优化目标的约束条件放宽一点:
\[\arg \min_{w\in \mathbb R^{10+1}} E_{in}(w)\]
\[\mathrm{s.t.}\ \ \sum_{i=0}^{10}1\{w_i\neq 0\}\leq 3\]
(约束条件放宽为,11个参数项里最多有3个不为0)
这个优化目标比之前的约束条件更宽松,但比没加约束的优化目标,发生过拟合的概率更低。
然而,求解这个优化目标是NP-Hard的,我们需要进一步将它的约束条件变成"软"约束:
\[\arg \min_{w\in \mathbb R^{10+1}} E_{in}(w)\ \ \mathrm{s.t.}\ \ \sum_{i=0}^{10} w_i^2\leq C\]
(注意,这个优化目标与上一个优化目标不是完全等价的)
约束条件可以看作是\(w^Tw\leq C\),C就是向量W的最大长度,约束边界可以看作是一个超球面,C越大,表明对参数的限制越宽松。
Weight Decay Regularization
我们用矩阵形式重写上面的优化目标:
\[\arg \min_{w\in \mathbb R^{Q+1}} E_{in}(w)=\frac 1 n (Zw-y)^T(Zw-y)\]
\[\mathrm{s.t.}\ \ w^Tw\leq C\]
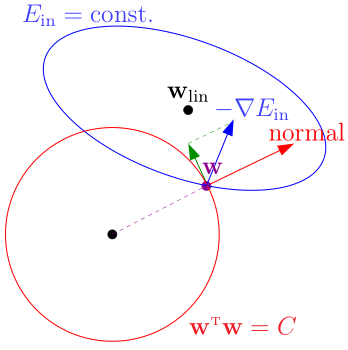
优化过程中,\(w\)沿\(-\nabla_w E_{in}\)的方向不断走,直到到达约束边界\(w^Tw=C\)
此时仍有优化的余地,为了不违反约束条件,我们把\(-\nabla_w E_{in}\)分解为两个分量:
- 红色向量(边界的法线方向)
- 绿色向量(边界的切线方向)
此时,我们保留绿色的分量,让w沿着绿色分量的方向走,直到绿色分量为0(即\(-\nabla_w E_{in}\)与红色向量平行),表明到达了在约束条件下的最优点
有了几何上的直观理解后,我们就知道了,在这个约束条件下,最优点\(w_{REG}\)的条件是\(-\nabla_w E_{in}(w_{REG})\)与红色向量(方向为\(w_{REG}\))平行:
\[\nabla_w E_{in}(w_{REG})=kw_{REG}\]
改写为:
\[\nabla_w E_{in}(w_{REG})+\frac{2\lambda} n w_{REG}=0\]
\(\lambda\)被称为拉格朗日乘子
现在,我们的任务是求出\(w_{REG}\)
\[E_{in}(w)=\frac 1 n (Zw-y)^T(Zw-y)\]
\[\nabla_w E_{in}=\frac 2 n (Z^TZw-Z^Ty)\]
\[\frac 2 n (Z^TZw_{REG}-Z^Ty)+\frac {2\lambda} n w_{REG}=0\]
\[w_{REG}=(Z^TZ+\lambda I)^{-1}Z^Ty\]
其中,\(Z^TZ\)是半正定的,如果\(\lambda >0\),则\(\lambda I\)是正定的,\(Z^TZ+\lambda I\)也就是正定的,进一步可以推出\(Z^TZ+\lambda I\)一定可逆
上述的线性回归被称为Ridge Regression(岭回归)
下面,我们把正则化推广到更一般的情况:在逻辑回归等问题中,\(w_{in}\)不能得到解析解,但可以求出数值解,在这种情况下,下面介绍求出\(w_{REG}\)的数值解的方法
\(\nabla_w E_{in}(w_{REG})\)是\(E_{in}(w)\)对w的导数,\(\frac{2\lambda} n w_{REG}\)是\(\frac{\lambda} n w^Tw\)对w的导数
所以满足\(\nabla_w E_{in}(w_{REG})+\frac{2\lambda} n w_{REG}=0\)的点\(w_{REG}\)可以使\(E_{in}(w)+\frac \lambda n w^Tw\)取得极小值
于是问题可以看作是最小化\(E_{aug}(w)=E_{in}(w)+\frac \lambda n w^Tw\),其中第二项就是正则化项(regularizer),我们称\(E_{aug}(w)\)为增广误差(augmented error)
我们可以用梯度下降、牛顿法等方法最优化这个\(E_{aug}(w)\)来得到\(w_{REG}\)的数值解
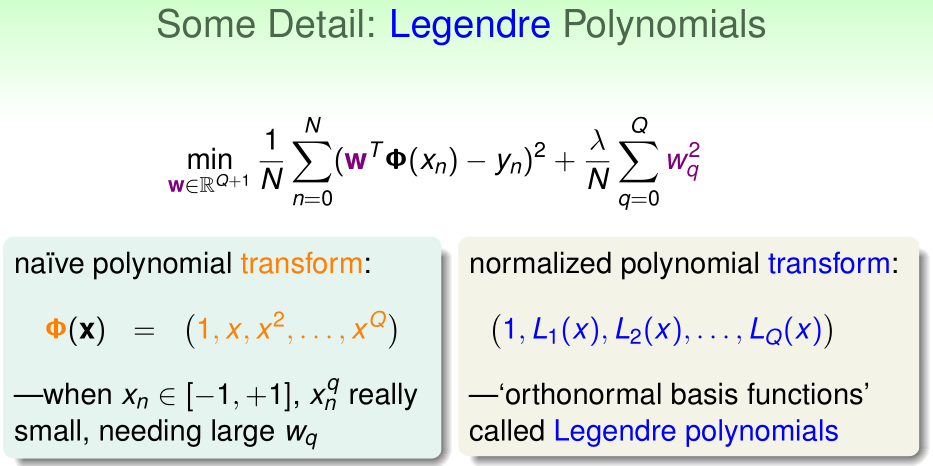
假如目前输入特征只有\(x\in[-1,1]\),通过特征变换映射到Q阶,Q很大时,高阶的\(x^q\)会变得很小,为了产生和低阶的\(w_ix^i\)一样的影响力,此时\(x^q\)前的参数就要用更大的\(w_q\)
为了解决这个问题,我们可以改变特征变换函数,采用勒让德多项式
Regularization and VC Theory
下面我们把正则化与VC理论联系起来,首先回顾增广误差与VC Bound:

在增广误差中,正则化项的\(w^Tw\)是与假设函数的复杂度正相关的
而VC Bound里的\(\Omega (\mathcal H)\)也是与假设函数的复杂度正相关的。
在没有正则化时,我们用\(E_{in}\)来近似估计\(E_{out}\),在加了正则化后,如果\(\frac \lambda n w^Tw\)与\(\Omega (\mathcal H)\)很相似的话,\(E_{aug}\)对\(E_{out}\)的近似程度将明显比\(E_{in}\)对\(E_{out}\)的近似程度高。
在加入正则化后,假设函数集\(\mathcal H\)被缩小到一个更小的子集\(\mathcal H(C)\subset \mathcal H\)中(其中每个假设函数都满足约束条件),而类似Lecture 12的证明,我们也可以证明出\(d_{VC}(\mathcal H(C))\leq d_{VC}(\mathcal H)\),所以正则化起到了减小VC维的作用。
General Regularizers
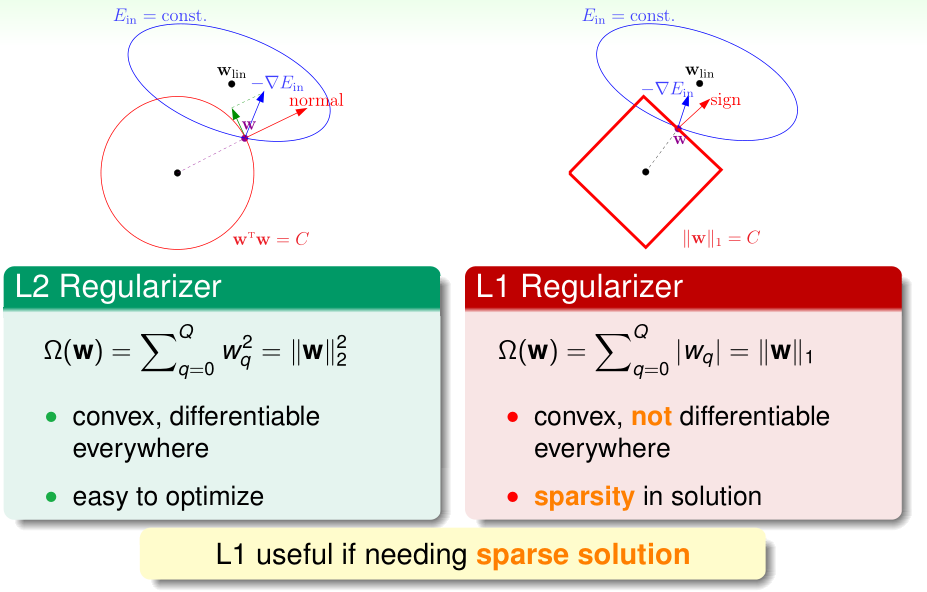
之前我们介绍的正则化项被称为L2正则化(因为其约束条件对应于\(\|w\|_2^2\leq C\)),L2正则化非常常用
这里介绍的L1正则化,约束条件对应于\(\|w\|_1\leq C\),一般使用L1正则化是为了得到更稀疏的参数w(w中很多项都是0,这样实际的参数数量少很多,从而可以加速预测过程)
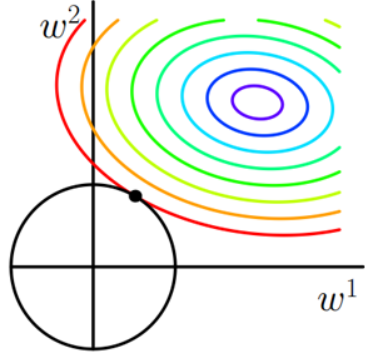
为什么L1正则化可以得到更加稀疏的参数向量w呢?首先我们回顾一下,在有约束条件时最优的\(w_{REG}\),\(\nabla_wE_{in}(w_{REG})\)方向应该与约束边界法向量平行,换言之,就是\(E_{in}\)的等高线与约束边界相切于\(w_{REG}\),如上图所示
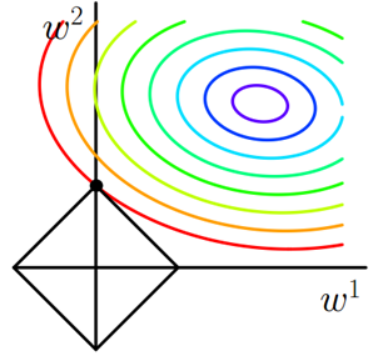
L1正则化相当于是要求\(\|w\|_1\leq C\),当参数数量为2时,在坐标系里看就是一个正菱形,我们再把\(E_{in}\)的等高线图画在坐标系里,可见等高线相切于菱形的顶点的概率更高,对应的w中的0也就更多了,这就解释了为何L1正则化可以得到更加稀疏的参数向量w
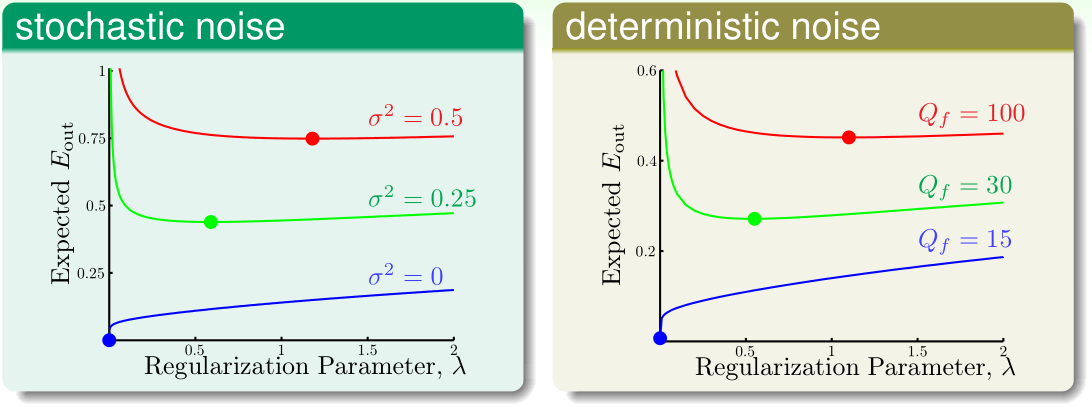
在有随机噪声\(\sigma^2\)和确定噪声\(Q_f\)的两种情况下,随着噪声强度不断变大,\(E_{out}\)最小的\(\lambda\)也随之变大
Lecture 15:Validation
Model Selection Problem
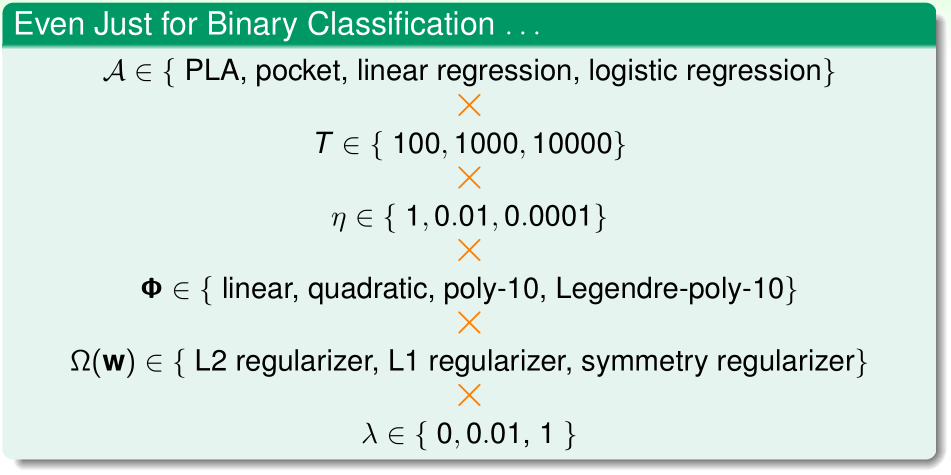
在机器学习中,我们经常遇到模型选择问题。例如在二分类问题中:
- 1、选择最佳的学习算法:PLA/口袋算法/线性回归实现二分类/逻辑回归
- 2、梯度下降算法中的学习率的选择
- 3、特征变换函数\(\Phi\)的选择
- 4、正则化项的选取
- 5、正则化参数\(\lambda\)的选取
我们可以把模型选择问题抽象为:
现在给定训练集\(\mathcal D\),有M个假设函数集\(\mathcal H_1,\cdots,\mathcal H_M\),它们对应M个学习算法\(\mathcal A_1,\cdots,\mathcal A_M\)
这些学习算法分别选出了每个集合\(E_{in}(E_{aug})\)最小的假设函数\(g_i=\mathcal A_i(\mathcal D)\)
我们要从M个\(g_i\)里选一个最优的\(g_{m^*}\),使得\(E_{out}(g_{m^*})\)尽可能小
显然,我们不能再拿训练集\(\mathcal D\)去计算每个\(E_{in}(g_i)\)来近似估计\(E_{out}(g_i)\),因为往往过拟合的\(g_i\)的\(E_{in}\)更小
Validation
交叉验证就是把大小为n的原始训练集\(\mathcal D\)拆成:大小为n-k的训练集\(\mathcal D_{train}\),和,大小为k的验证集\(\mathcal D_{val}\)
我们用假设函数h在验证集上的误差\(E_{val}(h)\)来近似估计\(E_{out}(h)\)
令\(\mathcal H=\{g_1^-,\cdots,g_M^-\}\)
其中\(g_1^-=\mathcal A_1(\mathcal D_{train}),\cdots,g_M^-=\mathcal A_M(\mathcal D_{train})\)
然后,我们选其中\(E_{val}(g_i^-)\)最小的i作为\(m^*\)
\[m^*=\arg \min_{i} E_{val}(g_i^-)\]
\[g_m^-=\mathcal A_{m^*}(\mathcal D_{train})\]
根据Lecture 4 \(\mathcal H\)为有限集时的不等式,有:
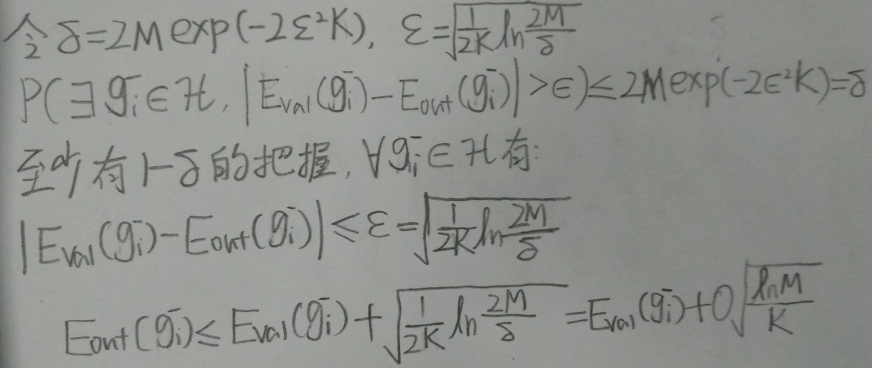
该不等式对\(g_m^-\in \mathcal H\)同样成立:

由于\(M=|\mathcal H|\)很小,所以\(E_{out}(g_m^-),E_{val}(g_m^-)\)非常接近,而且验证集样本数K越大,二者接近的程度也就越大。
最后,我们用整个原始训练集\(\mathcal D\)对\(\mathcal A_{m^*}\)重新训练一次,得到最终的\(g_{m^*}=\mathcal A_{m^*}(\mathcal D)\)
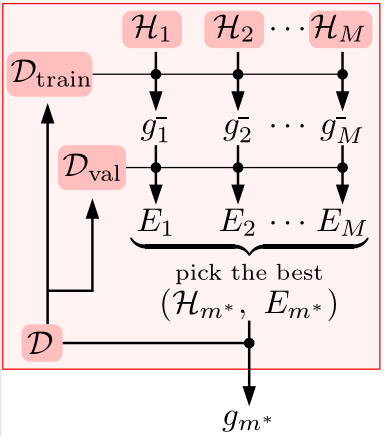
整个模型选择的流程如上图所示
在K很小时,训练样本损失不多,我们有\(E_{out}(g)\approx E_{out}(g^-)\)
在K很大时,根据刚刚推出的结论,我们有\(E_{out}(g^-)\approx E_{val}(g^-)\)
一般而言,验证集大小K选取为N/5比较合适
Leave-One-Out Cross Validation
Leave-One-Out Cross Validation在CS229中已经提及,这里不赘述它的具体实现
令\(e_i=\)用第i个训练样本当验证数据,其他n-1个样本训练出的\(g_i^-=\mathcal A(\mathcal D-(x^{(i)},y^{(i)}))\),在验证数据\((x^{(i)},y^{(i)})\)上得到的误差\(err(g_i^-(x^{(i)}),y^{(i)})\)
则通过Leave-One-Out Cross Validation得到的验证误差
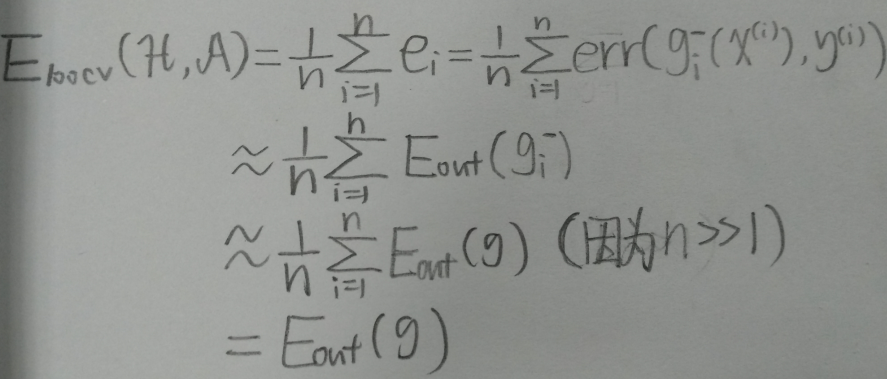
表明Leave-One-Out Cross Validation得到的验证误差是可以近似估计\(E_{out}(\mathcal A(\mathcal D))\)的
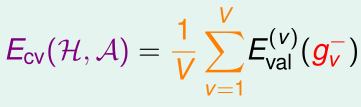
V-Fold Class Validation
V-Fold Class Validation是Leave-One-Out Cross Validation和原始的交叉验证方法的折中,它将训练集拆成互不相交的、大小相同的V份,每次只用其中V-1份训练,用剩下那一份交叉验证,获得\(E_{val}^{(i)}(g_i^-)\),最终得到的验证误差为
V-Fold Class Validation在CS229中也提过,这里不再赘述














 4194
4194











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









