






目前在基于相关滤波的跟踪算法中,有几种比较新的特征加权融合方法和模板更新方式。
1 计算当前帧跟踪结果和目标模板的欧式距离
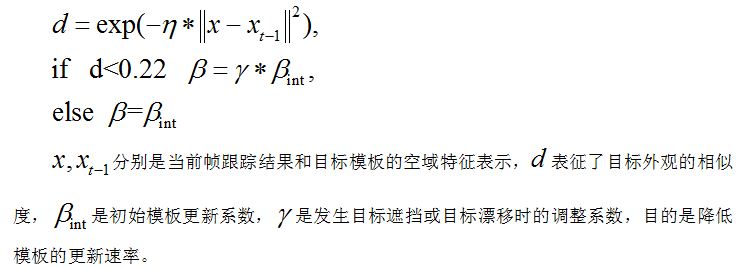
该策略直接利用当前帧的跟踪结果和目标模板进行对比,即衡量目标外观的相似度,若当前帧估计的目标和之前帧累计更新的目标模板由较大的特征差异,那么就不更新模板(很可能目标发生了部分遮挡)或者以较小的更新系数来更新模板。

MOSSE算法将PSR指标引入相关滤波跟踪领域,来评判滤波输出响应图的质量好坏。
参考文献: Bolme D S, Beveridge J R, Draper B A, et al. Visual object tracking using adaptive correlation filters[C]// IEEE Conference on Computer Vision and Pattern Recognition, 2010: 2544-2550.
参考文献:王暐, 王春平, 李军,等. 特征融合和模型自适应更新相结合的相关滤波目标跟踪[J]. 光学精密工程, 2016, 24(8):2059-2066.

参考文献:Liu T, Wang G, Yang Q. Real-time part-based visual tracking via adaptive correlation filters[C]// Computer Vision and Pattern Recognition. IEEE, 2015:4902-4912.


参考文献: 李宗民, 王国瑞, 刘玉杰,等. 基于相关滤波器的自适应目标跟踪[J]. 图学学报, 2017, 38(2):198-203.
7 基于模板互更新的模板更新方式
对于采用两种特征的相关滤波跟踪算法,特征1和特征2滤波器模板的更新十分重要,基于模板互更新的思想是:在目标跟踪的过程中,特征1具有较好的目标分辨性,而特征2描述目标能力较弱,已经不能适应目标的外观变化,这时就利用特征1的跟踪结果来进行特征2的滤波器模板更新,并增加特征2的更新系数,使其尽快适应当前的目标变化,同时适当降低特征1的滤波器模板更新系数。















 1434
1434











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









