






 海康机器人新一代3D激光轮廓传感器利用激光三角测量原理,提供高速、非接触式的三维数据采集,适用于高精度3D检测需求。传感器内置宽动态图像处理和数据融合算法,最高帧率可达10K Hz,支持多种触发模式,便于用户快速部署。在汽车行业、PCB行业和3C行业中,该传感器能提高缺陷检测准确性和产品质量。
海康机器人新一代3D激光轮廓传感器利用激光三角测量原理,提供高速、非接触式的三维数据采集,适用于高精度3D检测需求。传感器内置宽动态图像处理和数据融合算法,最高帧率可达10K Hz,支持多种触发模式,便于用户快速部署。在汽车行业、PCB行业和3C行业中,该传感器能提高缺陷检测准确性和产品质量。
随着视觉检测方案在工业领域的逐步深入,除常规的定位、测量、缺陷、字符识别等2D应用以外,高精密器件生产质检、成品组装等工序中衍生出更多高精度3D检测需求,拦截异常工件,提升产品质量。
海康机器人新一代3D激光轮廓传感器,基于激光三角测量原理,实现在线、高速、非接触式三维数据采集,结合后端测量软件,实时把控产品生产品质。
"本期新品 · 3D激光轮廓传感器
海康机器人新一代3D激光轮廓传感器,硬件内置宽动态图像处理和数据融合算法,结合芯片和激光精准的时序控制,实时输出3D点云数据,最高帧率可达10K Hz。同时,传感器支持多种触发模式接入,确保在非匀速运动场景下的相机控制和数据采集。此外,产品易用性方面,宽动态模式、ROI选择、一键调参等功能,方便用户快速部署。
■ 高帧率高精度数据输出
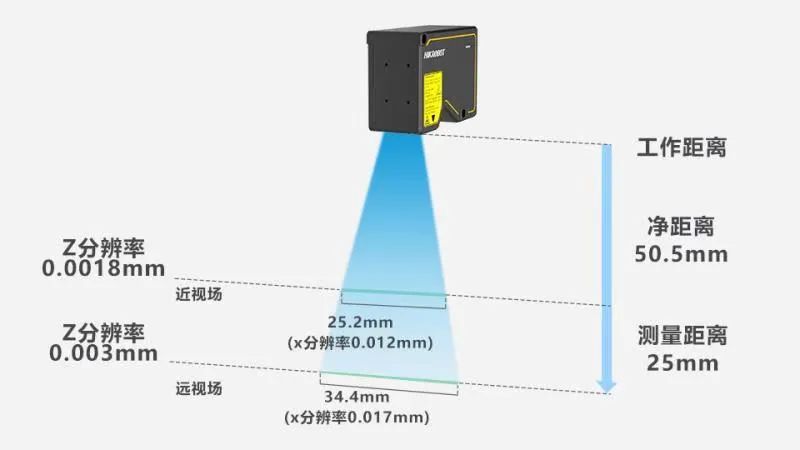
相机内部集成图像处理和亚像素、宽动态算法,传感器可直接输出微米级3D点云数据,帧率最高可达10KHz;同时还可支持输出轮廓数据、深度图和亮度图。

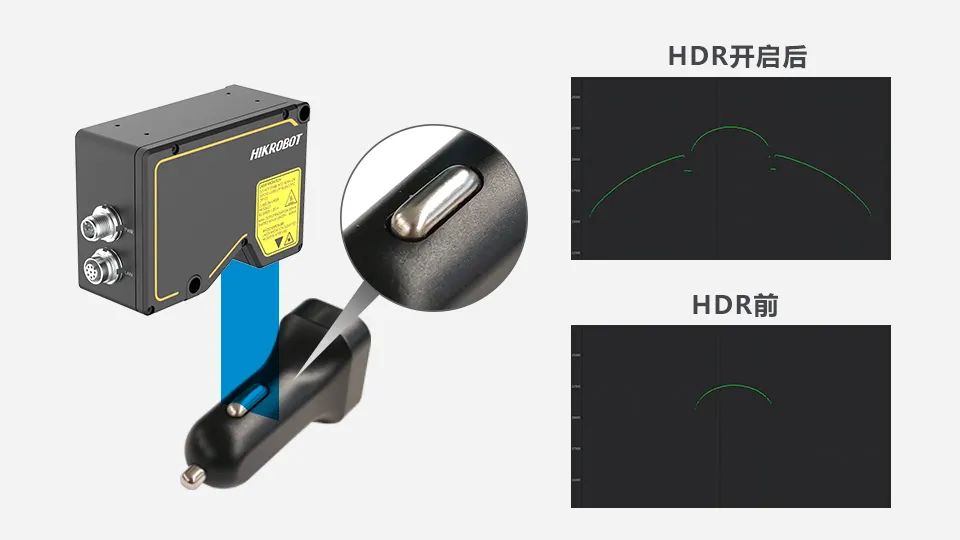
■ HDR模式
相机可支持HDR模式,能够适应不同场景,精准采集不同材质的轮廓,兼容性更好。
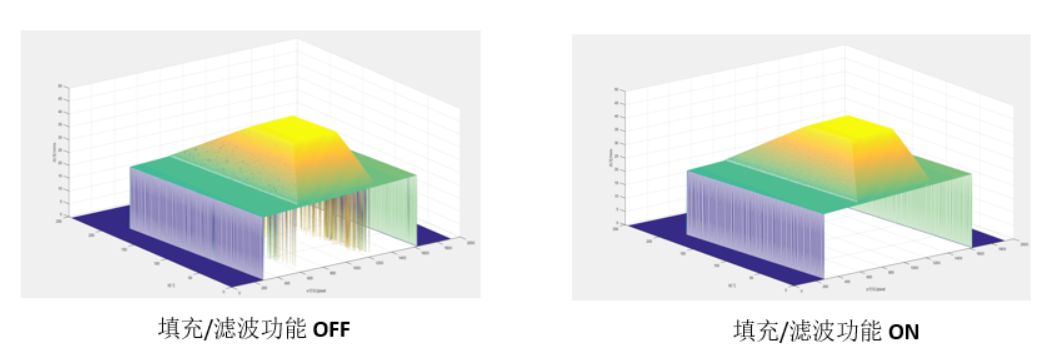
■ 图像滤波
相机支持单帧/帧间空点填充和滤波功能,弥补因材质、角度、盲区等原因导致的小范围数据缺失。
■ 快捷部署
在推荐的架设条件下,相机内置三组ROI设定,通过指示灯的状态,快速识别被测物是否脱离视野范围,帮助用户快速部署。
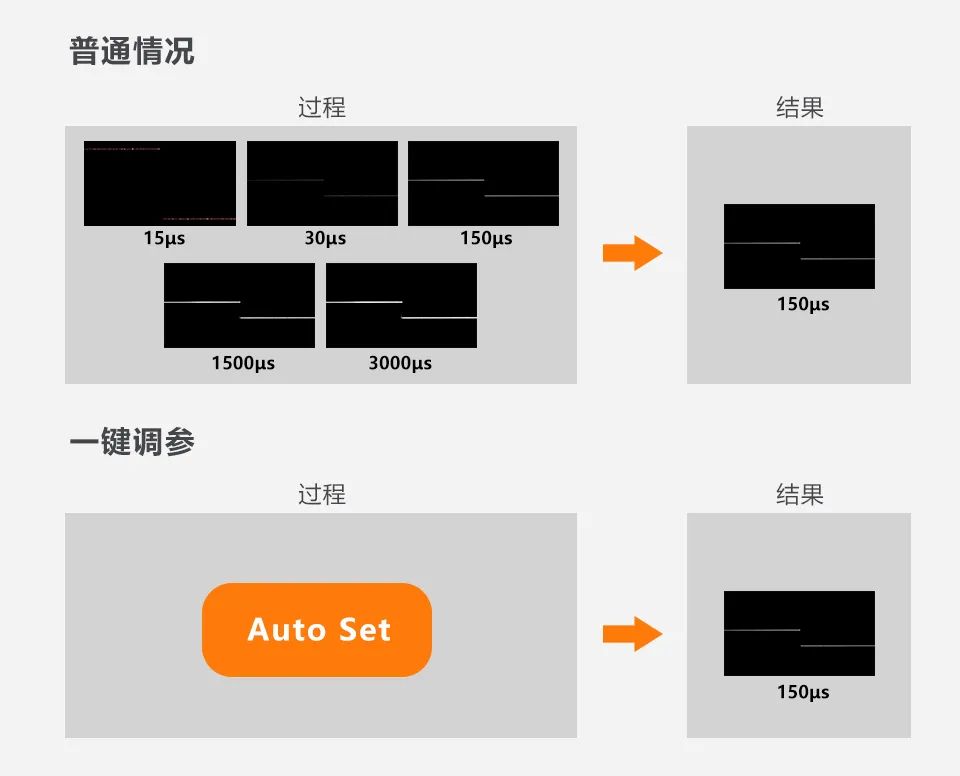
■ 一键调参
针对均匀材质的目标,相机可支持AutoSet功能一键调整相机曝光和增益参数,使轮廓数据效果达到最佳。
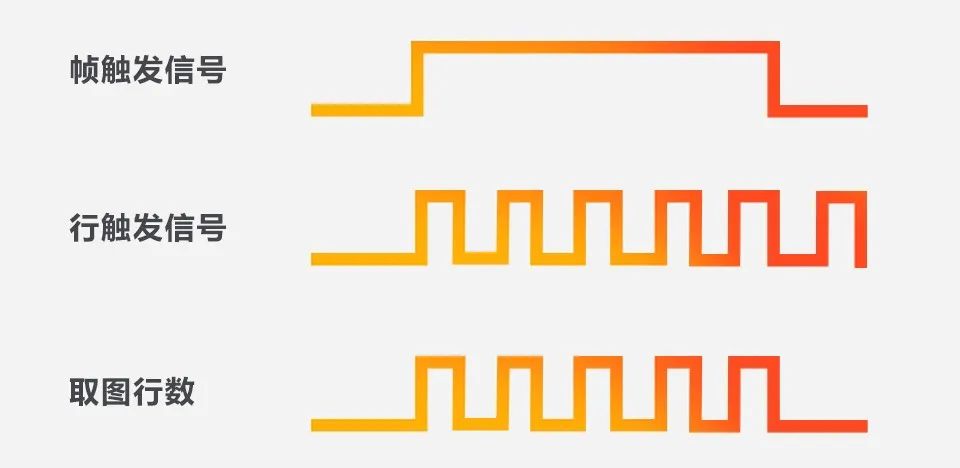
■ 双触发控制
双触发控制:在流水线连续检测场景下,支持帧触发和行触发相结合的双触发模式,用户可灵活、精准控制被测物的三维轮廓采集过程,单次触发得到固定行数的点云数据。除此之外,相机还支持硬触发、软触发、编码器触发信号接入,实现精准控制。
行业应用场景
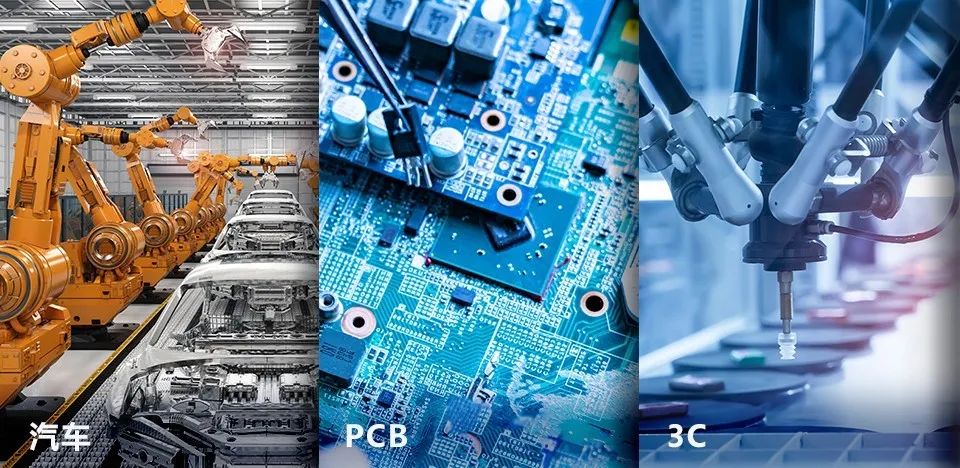
■ 汽车行业
汽车制造行业应用中对表面颜色过深,反光严重的目标物体做特征识别,2D相机需进行难度极高的打光方案,且识别正确率无法保证。新一代3D激光轮廓传感器不依赖外界光源,可在降低方案复杂度的同时,实现高精度的3D信息获取。
■ PCB行业
PCB板上贴片电阻是否存在缺陷需要多方位的视觉系统去检测,采用传统的2D相机难以检测出电阻虚焊引起的高度变化,新一代3D激光轮廓传感器可以扫描全部器件的三维特征,提高缺陷产品检出率,提升产品质量。
■ 3C行业
3C行业中,器件外型的提取,结构尺寸的测量以及产品标识的检测都决定着成品的质量。新一代3D激光轮廓传感器可利用精准的点云坐标和智能算法,输出高精度的3D数据。
往期回顾
朗誉科技∣超重载AGV行业引领者,不懈追求匠心精品
Stäubli WFT 携手Wiferion开发无线快速充电AGV
【产品速递】Velodyne Lidar推出了用于自主移动机器人和最后一英里交付的固态传感器
德国IDS推出新型Ensenso N40/N45 3D工业相机
现代汽车将以近10亿美元的价格收购波士顿动力(Boston Dynamics
|
|
| |





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









