






文档内容:研究1080P高清视频信号的视频图像格式以及需要转换的AV视频信号的图像格式
时间节点:2014/12/12~2014/12/13
一、 视频格式描述
1、 标清数字视频
标清数字视频亮度信号采样频率:13.5MHz;
每帧数据共625行,每行864个数据,即864*625;
行分奇偶两场,每场有效行288;
每行中有效数据720个,消隐数据144个;
帧速率为25帧/S;
13.5MHz = 864*625*25
2、 高清数字视频
高清数字视频高亮信号采样频率:74.25MHz;
每帧数据共1125行,每行2640个数据,即2640*1125;
行分奇偶两场,每场有效行540;
每行中有效数据1920个,消隐数据720个;
帧速率为25帧/S;
74.25MHz = 2640*1125*25
3、同步字节
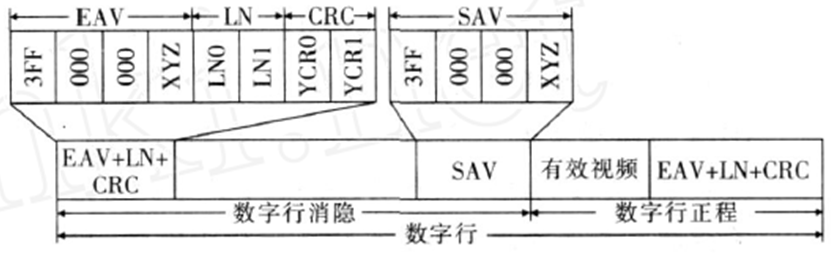
视频信号中的同步字节时嵌入在视频数据中的,用4个特征字节来表示,分别为EAV和SAV。EAV与SAV之间的数据被称为行消隐区。SAV和EAV为视频的定时基准码,SAV存在于每个视频数据块的开始,EAV存在于每个视频数据块的终止。
标清和高清在行消隐区的标志位上也有区别,标清视频数据在EAV后直接接行消隐区,而高清视频数据紧随EAV后接行号LV和CRC校验码再接行消隐区。高清信号的数字行的定时关系如下所示:
4、亮度信号与色差信号
高清视频信号中一帧画面亮度像素(Y)为1920*1080,两个色差信号(Cb/Cr)像素各为960*1080。当数字设备向外输出每帧内的像素数据时,按次序进行时分复用。亮度信号Y与经过时分复用的色差信号CbCr处理为20bit的数据字。每个数据字对应一个色差采取样和一个亮度取样,复用次序如下:
(Cb1,Y1) (Cr1,Y2) (Cb3,Y3) (Cr3,Y4)….
上述次序中Yi表示每行的第i个亮度有效取样,Cbi、Cri表示与Yi取样点位置相同的色差Cb和Cr分量的取样。由于色差信号取样频率是亮度信号取样频率的一般,所以色差信号的序号i仅取奇数值。
5、行扫描数字场
高清视频的行扫描数字场定时关系如下所示:
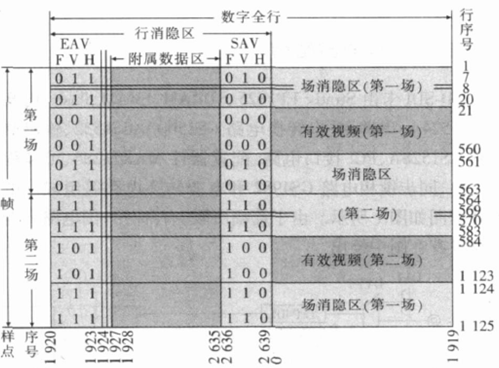
一帧总行数为1125,其中1124~1125、1~20行位于第一场数字场消隐区,共22行;561~583行位于第二消隐区,共23行。故每帧消隐区为45行。
21~560行为第一场有效视频区,共540行;584~1123为第二场有效视频区,共540行。两场合计1080行,即为一帧的有效视频行数。
6、输入高清视频信号的相关变量
由第5小节中的行扫描数字场中可以看到一个视频信号的一帧图像包括多中信息,如场消隐、有效视频信号、行消隐、第一场第二场等。我们输入的高清信号也就包括能够指示上述几个信息的信号。有如下:
Filed:场信号,用于指示一个图像中所处的场区,Field为低表示奇场,为高表示偶场;
Vsync:场同步信号,用于指示一帧图像中有效的视频信息所处的位置,当为低时,表示传输的场消隐区,当为高时,表示传输的有效视频信息行。配合Field信号我们可以判断有效视频信息的起始行;
Hsync:行同步信号,用于指示有效视频行中的有效视频像素和数字行消隐等信息。为高表示为有效视频的像素,为低表示为定是基准码CRC等信息。

















 9万+
9万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









