






基于TI公司最新DSP芯片TMS320C6455.设计并实现了以太网通信软硬件接口。采用TMS320C6455片内以太网接口模块EMAC/MDIO,结合片外AR8031 PHY芯片,在嵌入式操作系统DSP/BIOS架构上,运用TI官方网络开发包NDK提供的协议栈,实现了底层硬件驱动程序的编制及其协议栈接口,完成了数字信号的以太网传输。用户使用ndk网络协议站来实现的udp通信, 在DSP/BISO中启动了一个任务来实现网络通信。
1.硬件设计
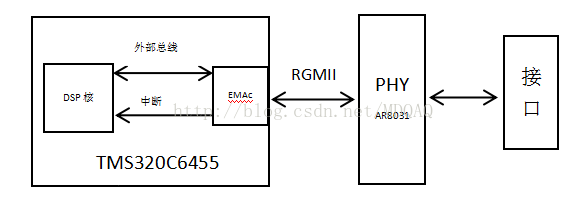
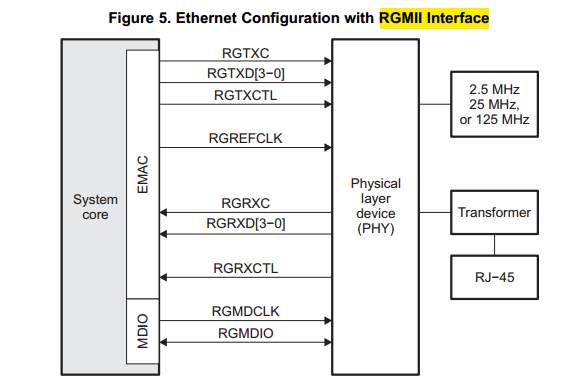
一块TMS320C6455处理器,一块AR8031 PHY芯片,和一个网络接口。C6455的EMAC接口与板上的AR8031 PHY芯片以RGMII方式连接,支持千兆双工通信模式。
整体框图:
RGMII方式连接图:
2.C6455 EMAC接口介绍
C6455的EMAC接口主要由3部分构成,包括MDIO模块、EMAC模块、EMAC控制模块。
(1)MDIO模块:通过802.3协议规定的串行通信接口,完成以太网物理层芯片的配置和管理
(2)EMAC模块:负责以太网数据包的发送和接收
(3)EMAC控制模块:作为DSP核和EMAC接口之间的桥梁,实现DSP核对EMAC模块和MDIO模块的控制
如图所示:
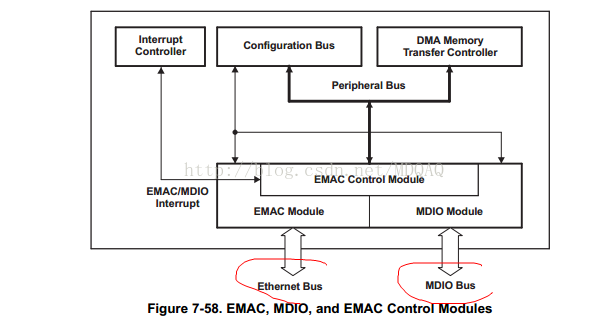
如上图所示,EMAC接口通过C6455提供的外设总线与DSP核连接,外设总线中的配置总线提供DSP核对EMAC寄存器的访问,数据总线完成DSP核与EMAC接口之间的以太网通信包的交换。此外,EMAC控制模块将EMAC模块和MDIO模块产生的18个中断信号综合在一起,对外提供一个中断信号,发往C6455的中断控制器,成为C6455处理器的第17号系统事件。C6455的DSP核在接到中断信号后,通过查询EMAC控制模块提供的中断状态寄存器判断中断产生的中断源。
3.以太网通信程序设计
本中设计的以太网通信程序是基于TI公司提供的DSP操作系统DSP/BIOS之上,由该操作系统提供时钟定时、任务同步、硬件中断管理等功能。
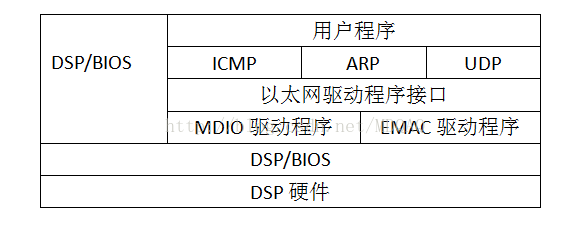
上图所示,以太网通信程序主要由DSP/BIOS操作系统、网络驱动程序和用户程序构成。
(1)DSP/BIOS操作系统:为其他模块提供定时、任务同步等服务
(2)网络驱动程序:完成以太网通信功能 主要包括以太网硬件驱动程序(MDIO驱动程序与EMAC驱动程序)和几个基本的网络协议(ICMP,ARP和UDP协议)
(3)用户程序:负责解释并执行人机界面发送的命令和数据
备注:MDIO驱动程序完成C6455 EMAC与物理芯片的交互,而EMAC驱动程序为用户程序提供了以太网通信接口。
4.MDIO驱动模块的设计
MDIO模块主要负责搜索、配置和监控外部以太网物理收发芯片。该模块主要包括如下几个部分:MDIO硬件初始化;PHY芯片搜索和配置;PHY芯片状态监控。
(1)MDIO硬件初始化
1. 读取C6455设备状态寄存器(DEVSTFAT)中的MACSEL位,确定EMAC与PHY芯片之间的连接方式。文中所涉及的信号处理板上的C6455 EMAC与PHY芯片之间采用RGMII方式连接。
2. 初始化MDIO状态机,将状态机置为初始化状态。
3. 配置MDIO访问PHY芯片的时钟并使能MDIO模块。
(2)PHY芯片搜索和配置
由于PHY芯片的搜索过程并无确定的时间,因此PHY芯片搜索和配置的实现采用状态机来实现,该状态机每隔100 ms根据查询到的PHY芯片的状态完成相应的操作并更新到下一状态。PHY芯片的搜索经过芯片复位,通信速率自协商等过程,最终与通信对端建立以太网物理层连接。
(3)PHY芯片状态监控
在以太网物理层链路的建立后,有可能由于用户拔出网线、对端机器改变通信接口速率等情况而导致链路状态改变,因此MDIO模块需要每隔一段时间对网络进行监控。文中设计的状态监控模块由DSP/BIOS操作系统每隔100 ms查询一次网络状态,状态监控程序一旦发现链路状态有所变化,则根据引起链路变化的不同原因,进入相应的处理流程。
5.EMAC驱动模块的设计
EMAC驱动模块主要负责以太网数据包的接收和发送,它是以太网驱动程序的主要组成部分。该模块主要包括:EMAC硬件初始化;EMAC接收模块;EMAC发送模块。
(1)EMAC硬件初始化
EMAC硬件初始化主要的目的是将EMAC模块置于就绪状态,此时EMAC已经可以接收和发送以太网数据包。初始化过程主要包括如下步骤:
1)禁止EMAC中断,复位EMAC的HDP寄存器、统计寄存器等,设置EMAC的MAC地址,挂接应用程序提供的回调函数等操作。
2)根据需求为发送模块和接收模块分配相应的包缓存描述符,并初始化接收模块的包缓存描述符,使之指向应用程序提供的数据接收存储块。文中设计的以太网驱动程序为接收模块分配了32个包缓存描述符,为发送模块分配了480个包缓存描述符,为发送和接收模块共分配了64块存储块,每个存储块大小为4 096个字节。图6是接收模块初始化完成后,接收描述符和接收存储块之间的关系。
3)配置MAC的是否为多播地址,使能以太网中断,EMAC处于就绪状态。
(2)EMAC接收模块
EMAC接收模块主要由EMAC中断来驱动。当EMAC硬件接收完一个或多个包数据时,会向DSP核发出一个接收完成中断。DSP核在接收到中断后,调用应用程序提供的接收数据回调函数处理接收到的数据,并返回给中断服务程序一个空闲的存储块,中断服务程序将该存储块重新链接到接收存储块链表,完成接收数据流程。
(3)EMAC发送模块
EMAC发送模块主要由一个发送接口函数ethSendPacket(char*Buffer,int Length)构成,用户程序通过调用该函数完成以太网数据的发送。该函数参数中,Buffer表示应用程序需要发送的数据,Length表示发送数据的长度。该函数首先将Buffer中的数据拷贝到空闲的存储块,并将该储存块加入如图7所示的WaitQueue队列中,WaitQueue队列表示等待加入EMAC发送队列(DescQueue)的存储块。ethSendPacket函数接着检查EMAC发送队列DescQueue是否有空闲的发送描述符,如果有,将WaitQueue链表中的存储块加入到DeseQueue.EMAC硬件将通过相应的描述符,将DescQueue中的数据发送出去。
当数据发送完成后,EMAC向DSP核发出一个发送完成中断。发送完成中断服务程序将发送后的存储块从DescQueue中移除并交还给应用程序,然后将使用过的发送描述符置为空闲状态,以便下次发送数据时使用。
6.ARP/ICMP/UDP网络协议模块的设计
为了与上位机完成网络通信,信号处理机还必须提供基本的网络通信协议。文中在设计时,主要提供了ARP/ICMP/UDP 3种网络协议。
(1)ARP协议:主要完成信号处理机IP地址和MAC地址的转换
(2)ICMP协议:主要完成测试信号处理机与上位机之间的网络连通性
(3)UDP协议:主要完成实际指令和数据的通信。














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









