






整体思路很简单,卡尔曼滤波器就是做数据融合的,先给一个GPS的数据(z)和一个里程计数据(u),让他们融合吧。
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Tue Dec 18 19:37:13 2018
@author: sc
args explanition:
p:covariance
x:state
z:observation
u:control
Pred:predict
Est:estatemation
Q:表示过程激励噪声的协方差,它是状态转移矩阵与实际过程之间的误差。
R:表示测量噪声协方差,和仪器相关的一个特性,
"""
import numpy as np
import math
import matplotlib.pyplot as plt
Q=np.diag([0.1,0.1,math.radians(1.0),1.0])**2
R=np.diag([1.0,math.radians(40.0)])**2
dt=0.1
def motion_model(x,u):
B=np.matrix([[dt*math.cos(x[2,0]),0.0],
[dt*math.sin(x[2,0]),0.0],
[0.0,dt],
[1.0,0.0]])
x=x+B*u
return x
#def observe_model(z):
# H=
# pass
#def JacoMo(xEst,u):
# return jMo
#def JacoOb(xEst):
# return jOb
def JacoMo(x, u):
"""
Jacobian of Motion Model
motion model
x_{t+1} = x_t+v*dt*cos(yaw)
y_{t+1} = y_t+v*dt*sin(yaw)
yaw_{t+1} = yaw_t+omega*dt
v_{t+1} = v{t}
so
dx/dyaw = -v*dt*sin(yaw)
dx/dv = dt*cos(yaw)
dy/dyaw = v*dt*cos(yaw)
dy/dv = dt*sin(yaw)
"""
yaw = x[2, 0]
v = u[0, 0]
jF = np.matrix([[1.0, 0.0, -dt * v * math.sin(yaw), dt * math.cos(yaw)],
[0.0, 1.0, dt * v * math.cos(yaw), dt * math.sin(yaw)],
[0.0, 0.0, 1.0, 0.0],
[0.0, 0.0, 0.0, 1.0]])
return jF
def JacoOb(x):
# Jacobian of Observation Model
jH = np.matrix([
[1, 0, 0, 0],
[0, 1, 0, 0]
])
return jH
def ekf_estimation(xEst,pEst,z,u):
# yu ce predict
xPre=motion_model(xEst,u)
jMo=JacoMo(xEst,u) # Jacobin of motion model
jOb=JacoOb(xEst)
pPre=jMo*pEst*jMo.T+Q
s=jOb*pPre*jOb.T+R
k=pPre*jOb.T*np.linalg.inv(s)
# update estimate
H=np.matrix([
[1,0,0,0],
[0,1,0,0]
])
zPre=H*xPre
xEst=xPre+k*(z-zPre)
pEst=(np.eye(len(xEst)) - k*jOb)*pPre
return xEst,pEst
def input_data(xTrue,xImu):
u=np.matrix([1.0,0.1]).T#jiaosudu he xiansudu
xTrue=motion_model(xTrue,u)
Qsim=np.diag([0.5,0.5])**2
Rsim=np.diag([1.0,math.radians(5.0)])**2
#GPS
z=np.matrix([xTrue[0,0]+np.random.randn()*Qsim[0,0],
xTrue[1,0]+np.random.randn()*Qsim[1,1]]).T
ud=np.matrix([u[0,0]+np.random.randn()*Rsim[0,0],
u[1,0]+np.random.randn()*Rsim[1,1]]).T
xImu=motion_model(xImu,ud)
return ud,z,xTrue,xImu
if __name__=="__main__":
xEst=np.matrix(np.zeros((4,1)))
xTrue=xEst
xImu=xTrue
pEst=np.eye(4)
t=0.1
hTrue=xTrue
hEst=xEst
hz=np.zeros((2,1))
hImu=xImu
for i in range(1000):
u,z,xTrue,xImu=input_data(xTrue,xImu)
xEst,pEst=ekf_estimation(xEst,pEst,z,u)
hTrue=np.hstack((hTrue,xTrue))
hEst=np.hstack((hEst,xEst))
hImu=np.hstack((hImu,xImu))
hz=np.hstack((hz,z))
# plot
plt.cla()
plt.plot(hz[0,:],hz[1,:],".g")
plt.plot(np.array(hTrue[0,:]).flatten(),
np.array(hTrue[1,:]).flatten(),"-b")
plt.plot(np.array(hEst[0,:]).flatten(),
np.array(hEst[1,:]).flatten(),"-r")
plt.plot(np.array(hImu[0,:]).flatten(),
np.array(hImu[1,:]).flatten(),"-k")
plt.pause(0.001)
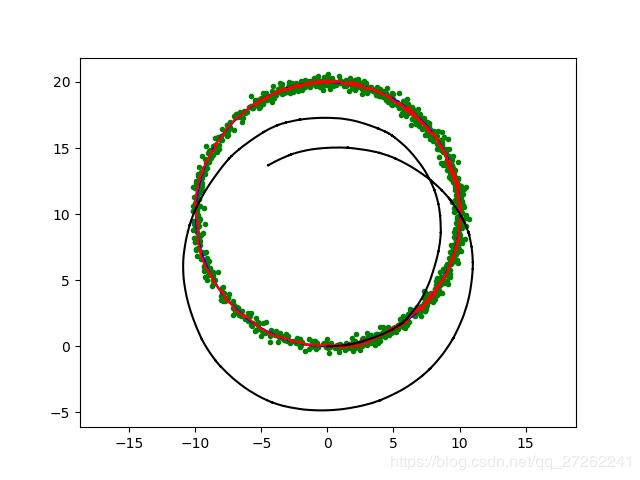
运行结果:















 957
957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









