






udacity 无迹卡尔曼滤波(UKF)python版本。根据网上的C++版本改写,方便大家参考。
参考的博客:
1无迹卡尔曼滤波(Unscented Kalman Filter, UKF):理论和应用_无迹卡尔曼滤波 python实现-CSDN博客
2无人驾驶技术——无损卡尔曼滤波(UKF)_c++ ukf-CSDN博客
感谢作者的无私分享。
一、引用的库
略。
二、定义矩阵类
略。
三、创建sigma点
使用当前状态估计和协方差矩阵生成sigma点。
def GenerateSigmaPoints():
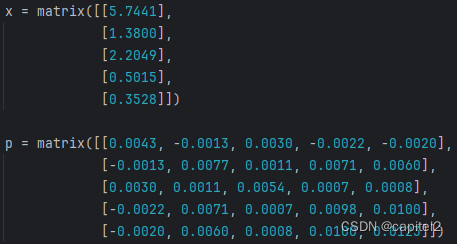
x = matrix([[5.7441], [1.3800], [2.2049], [0.5015], [0.3528]])
p = matrix([[0.0043, -0.0013, 0.0030, -0.0022, -0.0020],
[-0.0013, 0.0077, 0.0011, 0.0071, 0.0060],
[0.0030, 0.0011, 0.0054, 0.0007, 0.0008],
[-0.0022, 0.0071, 0.0007, 0.0098, 0.0100],
[-0.0020, 0.0060, 0.0008, 0.0100, 0.0123]])
n_x = 5
lambda1 = 3 - n_x
Xsig = matrix([[0] * 11 for _ in range(5)])
A = matrix([[0] * 5 for _ in range(5)])
A = p.Cholesky()
A = A.transpose();
#print(A)
n_x = 5
for row in range(n_x):
Xsig.value[row][0] = x.value[row][0]
for col in range(n_x):
for row in range(n_x):
Xsig.value[row][col + 1] = x.value[row][0] + sqrt(3) * A.value[row][col]
Xsig.value[row][col + 1 + n_x] = x.value[row][0] - sqrt(3) * A.value[row][col]
print(Xsig)
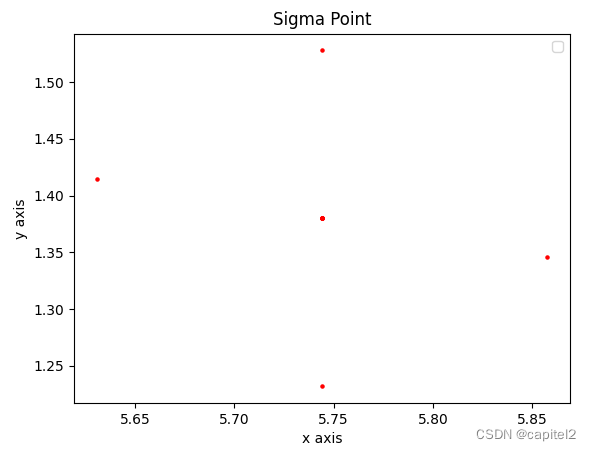
3.1 生成的sigma点值

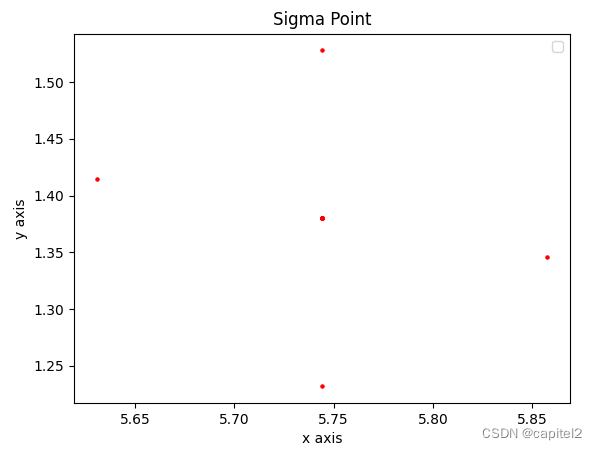
3.2显示Sigma点
如下图示:
3.3 原始均值与方差
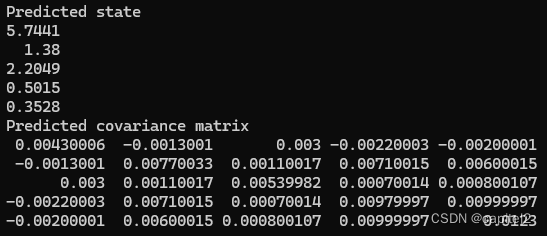
3.5生成sigma点的均值与方差
3.6结论
生成的sigma点保持了原始状态分布的均值与方差,代表了原始状态分布的均值与方差。
四、扩充sigma点
增加噪音状态量。
def AugmentedGenerateSigmaPoints():
x = matrix([[5.7441],
[1.3800],
[2.2049],
[0.5015],
[0.3528]])
p = matrix([[0.0043, -0.0013, 0.0030, -0.0022, -0.0020],
[-0.0013, 0.0077, 0.0011, 0.0071, 0.0060],
[0.0030, 0.0011, 0.0054, 0.0007, 0.0008],
[-0.0022, 0.0071, 0.0007, 0.0098, 0.0100],
[-0.0020, 0.0060, 0.0008, 0.0100, 0.0123]])
n_x = 5
n_aug = 7
lambda1 = 3 - n_aug
std_a = 0.2
std_yawdd = 0.2
Xsig_aug = matrix([[0] * 15 for _ in range(7)])
x_aug = matrix([[0] * 1 for _ in range(7)])
p_aug = matrix([[0] * 7 for _ in range(7)])
for row in range(n_x):
x_aug.value[row] = x.value[row]
for col in range(n_x):
for row in range(n_x):
p_aug.value[row][col] = p.value[row][col]
p_aug.value[5][5] = std_a * std_a
p_aug.value[6][6] = std_yawdd * std_yawdd
A = matrix([[0] * 7 for _ in range(7)])
A = p_aug.Cholesky()
A = A.transpose();
# print(A)
for row in range(n_aug):
Xsig_aug.value[row][0] = x_aug.value[row][0]
for col in range(n_aug):
for row in range(n_aug):
Xsig_aug.value[row][col + 1] = x_aug.value[row][0] + sqrt(3) * A.value[row][col]
Xsig_aug.value[row][col + 1 + n_aug] = x_aug.value[row][0] - sqrt(3) * A.value[row][col]
print(Xsig_aug)
4.1显示Sigma点
如下图示:
五、预测sigma点
对每个 sigma sigma点进行状态转移,得到预测状态
def SigmaPointPrediction():
n_x = 5
n_aug = 7
Xsig_aug = matrix([[5.7441, 5.85768, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.63052, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441],
[1.38, 1.34566, 1.52806, 1.38, 1.38, 1.38, 1.38, 1.38, 1.41434, 1.23194, 1.38, 1.38, 1.38, 1.38, 1.38],
[2.2049, 2.28414, 2.24557, 2.29582, 2.2049, 2.2049, 2.2049, 2.2049, 2.12566, 2.16423, 2.11398, 2.2049, 2.2049, 2.2049, 2.2049],
[0.5015, 0.44339, 0.631886, 0.516923, 0.595227, 0.5015, 0.5015, 0.5015, 0.55961, 0.371114, 0.486077, 0.407773, 0.5015, 0.5015, 0.5015],
[0.3528, 0.299973, 0.462123, 0.376339, 0.48417, 0.418721, 0.3528, 0.3528, 0.405627, 0.243477, 0.329261, 0.22143, 0.286879, 0.3528, 0.3528],
[0, 0, 0, 0, 0, 0, 0.34641, 0, 0, 0, 0, 0, 0, -0.34641, 0],
[0, 0, 0, 0, 0, 0, 0, 0.34641, 0, 0, 0, 0, 0, 0, -0.34641]])
Xsig_pred = matrix([[0] * 15 for _ in range(5)])
delta_t = 0.1
for col in range(15):
p_x = Xsig_aug.value[0][col]
p_y = Xsig_aug.value[1][col]
v = Xsig_aug.value[2][col]
yaw = Xsig_aug.value[3][col]
yawd = Xsig_aug.value[4][col]
v_a = Xsig_aug.value[5][col]
v_b = Xsig_aug.value[6][col]
if (fabs(yawd) > 0.001):
px_p = p_x + v / yawd * (sin(yaw + yawd * delta_t) - sin(yaw))
py_p = p_y + v / yawd * (cos(yaw) - cos(yaw + yawd * delta_t))
else:
px_p = p_x + v * delta_t * cos(yaw)
py_p = p_y + v * delta_t * sin(yaw)
v_p = v
yaw_p = yaw + yawd * delta_t
yawd_p = yawd
px_p = px_p + 0.5 * v_a * delta_t * delta_t * cos(yaw)
py_p = py_p + 0.5 * v_a * delta_t * delta_t * sin(yaw)
v_p = v_p + v_a * delta_t
yaw_p = yaw_p + 0.5 * v_b * delta_t * delta_t
yawd_p = yawd_p + v_b * delta_t
Xsig_pred.value[0][col] = px_p
Xsig_pred.value[1][col] = py_p
Xsig_pred.value[2][col] = v_p
Xsig_pred.value[3][col] = yaw_p
Xsig_pred.value[4][col] = yawd_p
print(Xsig_pred)
5.1显示预测点
如下图所示:
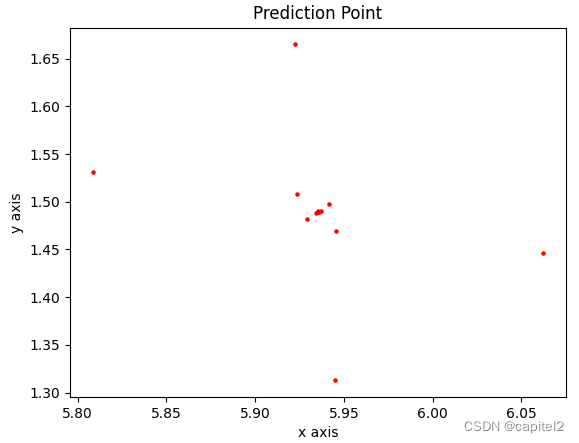
六、预测mean以及covariance
根据预测状态计算均值和协方差。
def PredictMeanAndCovariance():
n_x = 5
n_aug = 7
lambda1 = 3 - n_aug
Xsig_pred = matrix([[5.9374, 6.0640, 5.925, 5.9436, 5.9266, 5.9374, 5.9389, 5.9374, 5.8106, 5.9457, 5.9310, 5.9465, 5.9374, 5.9359, 5.93744],
[1.48, 1.4436, 1.660, 1.4934, 1.5036, 1.48, 1.4868, 1.48, 1.5271, 1.3104, 1.4787, 1.4674, 1.48, 1.4851, 1.486],
[2.204, 2.2841, 2.2455, 2.2958, 2.204, 2.204, 2.2395, 2.204, 2.1256, 2.1642, 2.1139, 2.204, 2.204, 2.1702, 2.2049],
[0.5367, 0.47338, 0.67809, 0.55455, 0.64364, 0.54337, 0.5367, 0.53851, 0.60017, 0.39546, 0.51900, 0.42991, 0.530188, 0.5367, 0.535048],
[0.352, 0.29997, 0.46212, 0.37633, 0.4841, 0.41872, 0.352, 0.38744, 0.40562, 0.24347, 0.32926, 0.2214, 0.28687, 0.352, 0.318159]])
weights = matrix([[0] * 15 for _ in range(1)])
x = matrix([[0] * 1 for _ in range(5)])
p = matrix([[0] * 5 for _ in range(5)])
x_diff = matrix([[0] * 1 for _ in range(5)])
x_diff_w = matrix([[0] * 1 for _ in range(5)])
weights.value[0][0] = lambda1 / (lambda1+ n_aug)
weight = 0.5 / (lambda1 + n_aug)
for col in range(1, 15):
weights.value[0][col] = weight
for col in range(15):
for row in range(5):
x.value[row][0] = x.value[row][0] + weights.value[0][col] * Xsig_pred.value[row][col]
M_PI = 3.1415926
for col in range(15):
for row in range(5):
x_diff.value[row][0] = Xsig_pred.value[row][col] - x.value[row][0]
while(row == 3 and x_diff.value[row][0] > M_PI):
x_diff.value[row][0] = x_diff.value[row][0] - 2 * M_PI
while(row == 3 and x_diff.value[row][0] < -M_PI):
x_diff.value[row][0] = x_diff.value[row][0] + 2 * M_PI
x_diff_w.value[row][0] = weights.value[0][col] * x_diff.value[row][0]
p = p + x_diff_w.__mul__(x_diff.transpose())
print(x)
print(p)
七、预测测量值
def PredictRadarMeasurement():
n_x = 5
n_aug = 7
n_z = 3
lambda1 = 3 - n_aug
std_radr = 0.3
std_radphi = 0.0175
std_radrd = 0.1
weights = matrix([[0] * 15 for _ in range(1)])
x = matrix([[0] * 1 for _ in range(5)])
p = matrix([[0] * 5 for _ in range(5)])
z_diff = matrix([[0] * 1 for _ in range(3)])
z_diff_w = matrix([[0] * 1 for _ in range(3)])
Zsig = matrix([[0] * 15 for _ in range(3)])
z_pred = matrix([[0] * 1 for _ in range(3)])
S = matrix([[0] * 3 for _ in range(3)])
R = matrix([[0] * 3 for _ in range(3)])
Xsig_pred = matrix([[5.9374, 6.0640, 5.925, 5.9436, 5.9266, 5.9374, 5.9389, 5.9374, 5.8106, 5.9457, 5.9310, 5.9465, 5.9374, 5.9359, 5.93744],
[1.48, 1.4436, 1.660, 1.4934, 1.5036, 1.48, 1.4868, 1.48, 1.5271, 1.3104, 1.4787, 1.4674, 1.48, 1.4851, 1.486],
[2.204, 2.2841, 2.2455, 2.2958, 2.204, 2.204, 2.2395, 2.204, 2.1256, 2.1642, 2.1139, 2.204, 2.204, 2.1702, 2.2049],
[0.5367, 0.47338, 0.67809, 0.55455, 0.64364, 0.54337, 0.5367, 0.53851, 0.60017, 0.39546, 0.51900, 0.42991, 0.530188, 0.5367, 0.535048],
[0.352, 0.29997, 0.46212, 0.37633, 0.4841, 0.41872, 0.352, 0.38744, 0.40562, 0.24347, 0.32926, 0.2214, 0.28687, 0.352, 0.318159]])
weights.value[0][0] = lambda1 / (lambda1+ n_aug)
weight = 0.5 / ( lambda1 + n_aug)
for col in range(1, 15):
weights.value[0][col] = weight
for col in range(15):
p_x = Xsig_pred.value[0][col]
p_y = Xsig_pred.value[1][col]
v = Xsig_pred.value[2][col]
yaw = Xsig_pred.value[3][col]
yawd = Xsig_pred.value[4][col]
th_2 = sqrt(p_x * p_x + p_y * p_y)
rho_z = th_2
yaw_z = atan2(p_y, p_x)
rhod_z = (p_x * cos(yaw) * v + p_y * sin(yaw) * v) / th_2
Zsig.value[0][col] = rho_z
Zsig.value[1][col] = yaw_z
Zsig.value[2][col] = rhod_z
#print(Zsig)
for col in range(15):
for row in range(3):
z_pred.value[row][0] = z_pred.value[row][0] + weights.value[0][col] * Zsig.value[row][col]
M_PI = 3.1415926
for col in range(15):
for row in range(3):
z_diff.value[row][0] = Zsig.value[row][col] - z_pred.value[row][0]
while (row == 1 and z_diff.value[row][0] > M_PI):
z_diff.value[row][0] = z_diff.value[row][0] - 2 * M_PI
while (row == 1 and z_diff.value[row][0] < -M_PI):
z_diff.value[row][0] = z_diff.value[row][0] + 2 * M_PI
z_diff_w.value[row][0] = weights.value[0][col] * z_diff.value[row][0]
#print(z_diff)
S = S + z_diff_w.__mul__(z_diff.transpose())
R = matrix([[std_radr * std_radr, 0, 0],[0, std_radphi * std_radphi, 0],[0, 0, std_radrd * std_radrd]])
S = S + R
print(z_pred)
print(S)
7.1显示预测的测量值
如下图示:
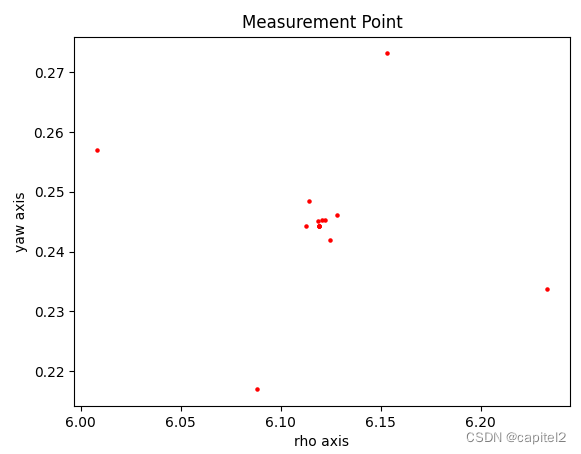
八、更新状态值
def UpdateState():
n_x = 5
n_aug = 7
n_z = 3
lambda1 = 3 - n_aug
weights = matrix([[0] * 15 for _ in range(1)])
x = matrix([[0] * 1 for _ in range(5)])
p = matrix([[0] * 5 for _ in range(5)])
x_diff = matrix([[0] * 1 for _ in range(5)])
x_diff_w = matrix([[0] * 1 for _ in range(5)])
z_diff = matrix([[0] * 1 for _ in range(3)])
z_diff_w = matrix([[0] * 1 for _ in range(3)])
Zsig = matrix([[0] * 15 for _ in range(3)])
z_pred = matrix([[0] * 1 for _ in range(3)])
z = matrix([[0] * 1 for _ in range(3)])
S = matrix([[0] * 3 for _ in range(3)])
R = matrix([[0] * 3 for _ in range(3)])
Tc = matrix([[0] * n_z for _ in range(n_x)])
K = matrix([[3] * 1 for _ in range(5)])
Xsig_pred = matrix([[5.9374, 6.0640, 5.925, 5.9436, 5.9266, 5.9374, 5.9389, 5.9374, 5.8106, 5.9457, 5.9310, 5.9465, 5.9374, 5.9359, 5.93744],
[1.48, 1.4436, 1.660, 1.4934, 1.5036, 1.48, 1.4868, 1.48, 1.5271, 1.3104, 1.4787, 1.4674, 1.48, 1.4851, 1.486],
[2.204, 2.2841, 2.2455, 2.2958, 2.204, 2.204, 2.2395, 2.204, 2.1256, 2.1642, 2.1139, 2.204, 2.204, 2.1702, 2.2049],
[0.5367, 0.47338, 0.67809, 0.55455, 0.64364, 0.54337, 0.5367, 0.53851, 0.60017, 0.39546, 0.51900, 0.42991, 0.530188, 0.5367, 0.535048],
[0.352, 0.29997, 0.46212, 0.37633, 0.4841, 0.41872, 0.352, 0.38744, 0.40562, 0.24347, 0.32926, 0.2214, 0.28687, 0.352, 0.318159]])
x = matrix([[5.93637],[1.49035],[2.20528],[0.536853],[0.353577]])
p = matrix([[0.0054342, -0.002405, 0.0034157, -0.0034819, -0.00299378],
[-0.002405, 0.01084, 0.001492, 0.0098018, 0.00791091],
[0.0034157, 0.001492, 0.0058012, 0.00077863, 0.000792973],
[-0.0034819, 0.0098018, 0.00077863, 0.011923, 0.0112491],
[-0.0029937, 0.0079109, 0.00079297, 0.011249, 0.0126972]])
Zsig = matrix([[6.1190, 6.2334, 6.1531, 6.1283, 6.1143, 6.1190, 6.1221, 6.1190, 6.0079, 6.0883, 6.1125, 6.1248, 6.1190, 6.1188, 6.12057],
[0.24428, 0.2337, 0.27316, 0.24616, 0.24846, 0.24428, 0.24530, 0.24428, 0.25700, 0.21692, 0.24433, 0.24193, 0.24428, 0.24515, 0.245239],
[2.1104, 2.2188, 2.0639, 2.187, 2.0341, 2.1061, 2.1450, 2.1092, 2.0016, 2.129, 2.0346, 2.1651, 2.1145, 2.0786, 2.11295]])
z_pred = matrix([[6.12155],[0.245993],[2.10313]])
S = matrix([[0.0946171, -0.000139448, 0.00407016],
[-0.000139448, 0.000617548, -0.000770652],
[0.00407016, -0.000770652, 0.0180917]])
z = matrix([[5.9214],[0.2187],[2.0062]])
weights.value[0][0] = lambda1 / (lambda1+ n_aug)
weight = 0.5 / ( lambda1 + n_aug)
for i in range(1, 15):
weights.value[0][i] = weight
M_PI = 3.1415926
for col in range(15):
for row1 in range(5):
x_diff.value[row1][0] = Xsig_pred.value[row1][col] - x.value[row1][0]
while (row1 == 3 and x_diff.value[row1][0] > M_PI):
x_diff.value[row1][0] = x_diff.value[row1][0] - 2 * M_PI
while (row1 == 3 and x_diff.value[row1][0] < -M_PI):
x_diff.value[row1][0] = x_diff.value[row1][0] + 2 * M_PI
x_diff_w.value[row1][0] = weights.value[0][col] * x_diff.value[row1][0]
for row2 in range(3):
z_diff.value[row2][0] = Zsig.value[row2][col] - z_pred.value[row2][0]
while (row2 == 1 and z_diff.value[row2][0] > M_PI):
z_diff.value[row2][0] = z_diff.value[row2][0] - 2 * M_PI
while (row2 == 1 and z_diff.value[row2][0] < -M_PI):
z_diff.value[row2][0] = z_diff.value[row2][0] + 2 * M_PI
Tc = Tc + x_diff_w.__mul__(z_diff.transpose())
K = Tc.__mul__(S.inverse())
z_diff = z - z_pred
while (z_diff.value[1][0] > M_PI):
z_diff.value[1][0] = z_diff.value[1][0] - 2 * M_PI
while (z_diff.value[1][0] < -M_PI):
z_diff.value[1][0] = z_diff.value[1][0] + 2 * M_PI
x = x + K.__mul__(z_diff)
KS = K.__mul__(S)
p = p - KS.__mul__(K.transpose())
print(x)
print(p)
九、功能调用
#GenerateSigmaPoints() #AugmentedGenerateSigmaPoints() #SigmaPointPrediction() #PredictMeanAndCovariance() #PredictRadarMeasurement() UpdateState()
十、关于矩阵的逆
用到函数Cholesky,
def Cholesky(self, ztol=1.0e-5):
若ztol=1.0e-5,则结果与c++程序会有差异;
若ztol=1.0e-6,则结果与c++程序基本相同。
十一、问题
(1)初始的协方差矩阵P如何获取到?
udacity例子是提前给了P的值,实际自己做项目的时候,这个P如何设置?有知道的网友请赐教。
十二、关于状态预测UT变换以及量测预测UT变换
参考第05讲 无迹卡尔曼滤波与联邦滤波_哔哩哔哩_bilibili
关于状态预测UT变换以及量测预测UT变换的介绍,得到如下图:

上图状态预测UT变换中,
(1)步骤相当于GenerateSigmaPoints()
(2)步骤相当于SigmaPointPrediction()
(3)、(4)步骤相当于PredictMeanAndCovariance()
上图量测预测UT变换中,
(1)步骤相当于GenerateSigmaPoints()
(2)、(3)、(4)步骤相当于PredictRadarMeasurement()
udacity教程中,省略了量测预测UT变换中的步骤(1),在完成状态预测UT变换的(1)、(2)、(3)、(4)步骤后,直接到了量测预测UT变换的(2)、(3)、(4)步骤。















 5719
5719











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









