







第二篇文章是在第一篇文章简单的单车道元胞自动机模型基础之上,引入三相交通流理论的核心观点,构建一个简单的单车道三相交通流模型。
三相交通流理论是德国物理学家Kerner基于多年对高速公路的时空图和数据的采集与观察,提出的一个新的交通流理论,发展至今已得到很多学者的认可与完善,但也有很多传统交通流理论学者一直在对其表示反驳。其具体理论的发展历史和实测数据的验证可以通过一些Kerner的论文著作了解一下。
刚开始读这一理论时我完全摸不着头脑(现在读过很久、写了论文也没有弄明白其中一些复杂独特的概念),但我结合实际还是能理解这一理论提出的最核心的机制:速度适配。
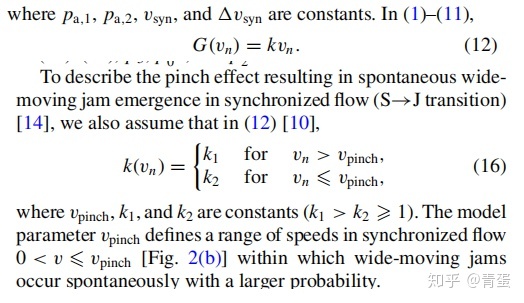
想象一下我们实际开车时的情况,如果与前车距离很远,或是根本看不到前面有车,那么我们会无所顾忌地加速前进;但当我们观察到前车距离挺近的时候,便会根据前车车速来控制自身车速尽可能与前车一致。需要注意的是,在这里强调的是车速保持一致,而不是保持一定的距离。我们开车时也可以感受到,如果与前车都开的很慢,那么保持的间距会小一些,因为这种情况下比较容易控制车速避免碰撞;如果两辆车都在高速行驶,那么作为后车保持的距离都会大一些,不会与前车贴的太近。Kerner用了关于车速与车间距的函数来描述这一关系,同时设置了在一定间距下与前车速度适配的规则。

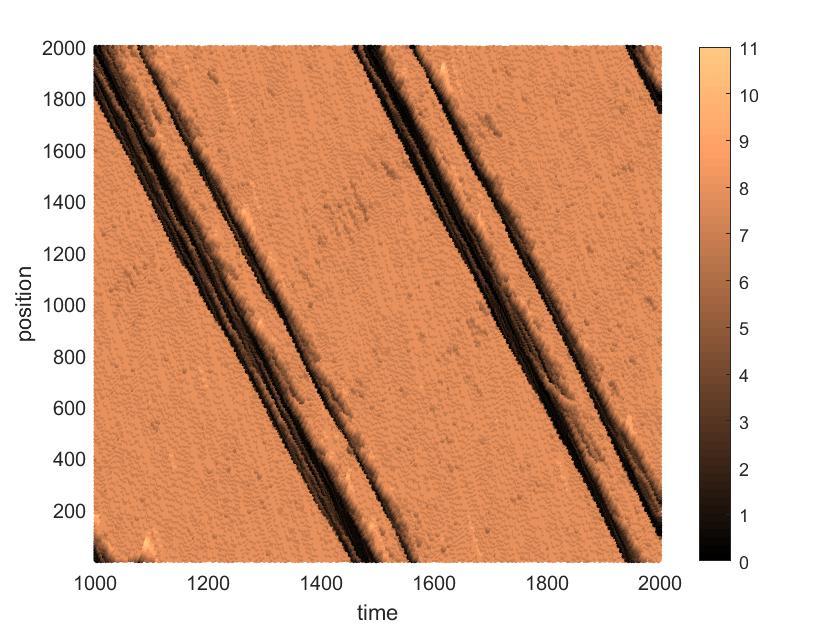
有了这一规则,仿真做出的时空相位图和流密图中形成了一种新的相位(也就是交通流的一种特定的稳定的状态),Kerner命名为了同步流,这也是三相交通流理论核心的概念。同步流是一种介于自由流与堵塞流之间的状态。就我们日常开车的情况而言,经常能感受到那么一种状态:路上车很多,不能肆无忌惮地开到最大车速行驶,但是每辆车也都不会停下来,都能保持不是很慢的车速行驶,车与车的间距有大有小,这种情况下交通流就处在一种同步流的状态。另外,与传统交通流认为拥挤从自由流中产生的不同,三相交通流认
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 128
128











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









