







简介:本教程将带领你深入了解UWB定位技术,使用STM32微控制器和ESP8266 WiFi模块构建一个完整的UWB定位系统。通过实践任务,你将掌握UWB通信、STM32编程、多点定位算法、服务器通信协议和嵌入式软件开发等知识。本教程包含完整的源码,涵盖硬件电路设计、软件实现和测试验证,让你快速上手并应用UWB定位技术。 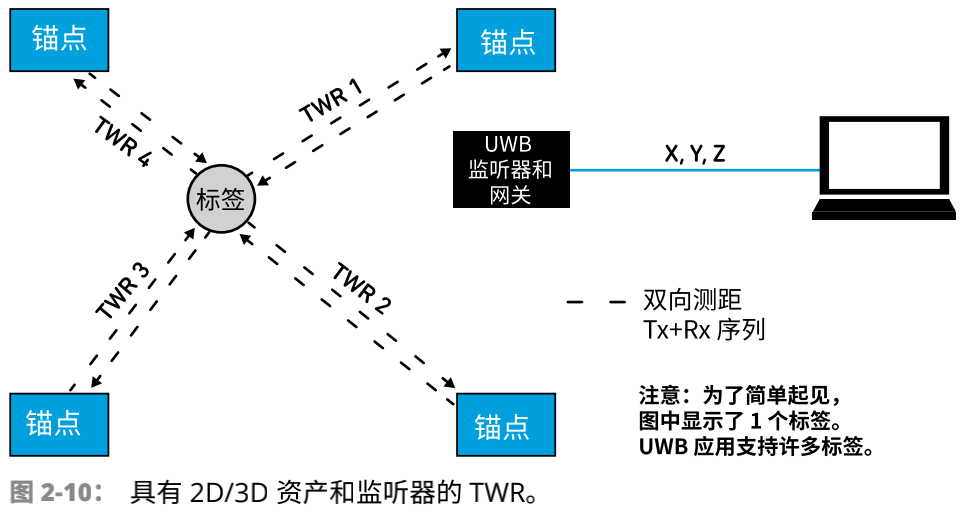
1. UWB定位技术原理
1.1 UWB技术概述
超宽带(UWB)是一种无线通信技术,利用了极宽的频谱(大于500 MHz)来传输数据。与传统的窄带技术不同,UWB使用脉冲传输技术,具有以下特点:
- 高带宽:极宽的频谱允许高数据速率传输。
- 低功率:脉冲传输技术可以降低功耗,延长设备续航时间。
- 抗干扰性强:宽频谱特性使其不易受到其他无线信号的干扰。
2. DW1000芯片驱动与接口
2.1 DW1000芯片简介
DW1000芯片是一款超宽带(UWB)收发器,专为精确定位应用而设计。它集成了一个低功耗MCU、一个UWB收发器和一个射频前端。DW1000芯片支持双向测距(TWR)和时差到达(TDoA)定位技术,可实现厘米级的定位精度。
2.2 DW1000芯片寄存器和命令
DW1000芯片具有丰富的寄存器和命令,用于配置和控制芯片。寄存器分为只读寄存器和可写寄存器,可通过SPI或UART接口访问。命令用于触发特定操作,例如启动测距或设置芯片模式。
2.3 DW1000芯片驱动程序设计
2.3.1 SPI接口驱动
SPI接口是DW1000芯片常用的接口之一。SPI接口驱动程序负责初始化SPI接口,配置SPI参数,并实现寄存器读写操作。
// SPI接口初始化
void spi_init(void)
{
// 配置SPI参数
SPI_InitTypeDef spi_init_struct;
spi_init_struct.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
spi_init_struct.Direction = SPI_DIRECTION_2LINES;
spi_init_struct.DataSize = SPI_DATASIZE_8BIT;
spi_init_struct.FirstBit = SPI_FIRSTBIT_MSB;
spi_init_struct.Mode = SPI_MODE_MASTER;
spi_init_struct.NSS = SPI_NSS_SOFT;
spi_init_struct.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
spi_init_struct.CRCPolynomial = 7;
// 初始化SPI接口
SPI_Init(&spi_init_struct);
// 使能SPI接口
SPI_Cmd(ENABLE);
}
// SPI寄存器读操作
uint8_t spi_read_reg(uint8_t addr)
{
// 发送读命令
SPI_SendData8(SPI_CMD_READ | addr);
// 接收寄存器值
return SPI_ReceiveData8();
}
// SPI寄存器写操作
void spi_write_reg(uint8_t addr, uint8_t data)
{
// 发送写命令
SPI_SendData8(SPI_CMD_WRITE | addr);
// 发送寄存器值
SPI_SendData8(data);
}
2.3.2 UART接口驱动
UART接口也是DW1000芯片常用的接口之一。UART接口驱动程序负责初始化UART接口,配置UART参数,并实现命令发送和接收操作。
// UART接口初始化
void uart_init(void)
{
// 配置UART参数
UART_InitTypeDef uart_init_struct;
uart_init_struct.BaudRate = 115200;
uart_init_struct.WordLength = UART_WORDLENGTH_8B;
uart_init_struct.StopBits = UART_STOPBITS_1;
uart_init_struct.Parity = UART_PARITY_NONE;
uart_init_struct.Mode = UART_MODE_TX_RX;
uart_init_struct.HardwareFlowControl = UART_HARDWARECONTROL_NONE;
// 初始化UART接口
UART_Init(&uart_init_struct);
// 使能UART接口
UART_Cmd(ENABLE);
}
// UART命令发送
void uart_send_cmd(uint8_t *cmd, uint8_t len)
{
// 发送命令
for (uint8_t i = 0; i < len; i++) {
UART_SendData8(cmd[i]);
}
}
// UART命令接收
uint8_t uart_recv_cmd(uint8_t *cmd, uint8_t len)
{
// 接收命令
uint8_t recv_len = 0;
for (uint8_t i = 0; i < len; i++) {
if (UART_ReceiveData8(&cmd[i])) {
recv_len++;
}
}
return recv_len;
}
3. STM32 GPIO、定时器、串口外设编程
3.1 GPIO外设编程
3.1.1 GPIO引脚配置
1. GPIO引脚模式配置
void GPIO_Mode_Config(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_Mode_TypeDef GPIO_Mode)
{
// 1. 使能GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOx, ENABLE);
// 2. 清除GPIOx_CRL/GPIOx_CRH寄存器的指定位
GPIOx->CRL &= ~(0xF << (GPIO_Pin * 4));
// 3. 设置GPIOx_CRL/GPIOx_CRH寄存器的指定位
GPIOx->CRL |= ((uint32_t)GPIO_Mode << (GPIO_Pin * 4));
}
参数说明:
- GPIOx:GPIO端口地址
- GPIO_Pin:GPIO引脚号
- GPIO_Mode:GPIO引脚模式
2. GPIO引脚输出类型配置
void GPIO_OType_Config(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_OType_TypeDef GPIO_OType)
{
// 1. 使能GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOx, ENABLE);
// 2. 清除GPIOx_CRL/GPIOx_CRH寄存器的指定位
GPIOx->CRL &= ~(0x03 << (GPIO_Pin * 4));
// 3. 设置GPIOx_CRL/GPIOx_CRH寄存器的指定位
GPIOx->CRL |= ((uint32_t)GPIO_OType << (GPIO_Pin * 4));
}
参数说明:
- GPIOx:GPIO端口地址
- GPIO_Pin:GPIO引脚号
- GPIO_OType:GPIO引脚输出类型
3.1.2 GPIO中断处理
1. GPIO中断配置
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)
{
// 1. 使能AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// 2. 清除EXTICR寄存器的指定位
AFIO->EXTICR[GPIO_PortSource] &= ~(0x0F << (GPIO_PinSource * 4));
// 3. 设置EXTICR寄存器的指定位
AFIO->EXTICR[GPIO_PortSource] |= ((uint32_t)GPIO_PortSource << (GPIO_PinSource * 4));
}
参数说明:
- GPIO_PortSource:GPIO端口源
- GPIO_PinSource:GPIO引脚源
2. GPIO中断使能
void GPIO_EXTILineCmd(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource, uint8_t Cmd)
{
// 1. 使能EXTI时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// 2. 清除EXTI寄存器的指定位
EXTI->IMR &= ~(1 << GPIO_PinSource);
// 3. 设置EXTI寄存器的指定位
EXTI->IMR |= ((uint32_t)Cmd << GPIO_PinSource);
}
参数说明:
- GPIO_PortSource:GPIO端口源
- GPIO_PinSource:GPIO引脚源
- Cmd:中断使能/禁止命令
3.2 定时器外设编程
3.2.1 定时器配置
1. 定时器时钟配置
void TIM_ClockConfig(TIM_TypeDef *TIMx, uint32_t TIM_ClockSource, uint32_t TIM_ClockPrescaler)
{
// 1. 使能定时器时钟
if (TIMx == TIM1)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
}
else if (TIMx == TIM2)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
}
else if (TIMx == TIM3)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
}
else if (TIMx == TIM4)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
}
// 2. 设置定时器时钟源和分频系数
TIMx->CR1 = (TIMx->CR1 & ~TIM_CR1_CKD) | TIM_ClockSource;
TIMx->PSC = TIM_ClockPrescaler;
}
参数说明:
- TIMx:定时器地址
- TIM_ClockSource:定时器时钟源
- TIM_ClockPrescaler:定时器时钟分频系数
2. 定时器模式配置
void TIM_ModeConfig(TIM_TypeDef *TIMx, uint32_t TIM_Mode)
{
// 1. 清除TIMx_CR1寄存器的指定位
TIMx->CR1 &= ~TIM_CR1_DIR;
// 2. 设置TIMx_CR1寄存器的指定位
TIMx->CR1 |= TIM_Mode;
}
参数说明:
- TIMx:定时器地址
- TIM_Mode:定时器模式
3.2.2 定时器中断处理
1. 定时器中断配置
void TIM_ITConfig(TIM_TypeDef *TIMx, uint16_t TIM_IT, uint8_t Cmd)
{
// 1. 清除TIMx_DIER寄存器的指定位
TIMx->DIER &= ~(TIM_IT);
// 2. 设置TIMx_DIER寄存器的指定位
TIMx->DIER |= (TIM_IT & Cmd);
}
参数说明:
- TIMx:定时器地址
- TIM_IT:定时器中断类型
- Cmd:中断使能/禁止命令
3.3 串口外设编程
3.3.1 串口配置
1. 串口时钟配置
void USART_ClockConfig(USART_TypeDef *USARTx, uint32_t USART_ClockSource, uint32_t USART_ClockPrescaler)
{
// 1. 使能串口时钟
if (USARTx == USART1)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
}
else if (USARTx == USART2)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
}
else if (USARTx == USART3)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
}
// 2. 设置串口时钟源和分频系数
USARTx->CR1 = (USARTx->CR1 & ~USART_CR1_CKD) | USART_ClockSource;
USARTx->BRR = USART_ClockPrescaler;
}
参数说明:
- USARTx:串口地址
- USART_ClockSource:串口时钟源
- USART_ClockPrescaler:串口时钟分频系数
2. 串口模式配置
void USART_ModeConfig(USART_TypeDef *USARTx, uint32_t USART_Mode)
{
// 1. 清除USARTx_CR1寄存器的指定位
USARTx->CR1 &= ~USART_CR1_M;
// 2. 设置USARTx_CR1寄存器的指定位
USARTx->CR1 |= USART_Mode;
}
参数说明:
- USARTx:串口地址
- USART_Mode:串口模式
3.3.2 串口中断处理
1. 串口中断配置
void USART_ITConfig(USART_TypeDef *USARTx, uint16_t USART_IT, uint8_t Cmd)
{
// 1. 清除USARTx_CR1寄存器的指定位
USARTx->CR1 &= ~(USART_IT);
// 2. 设置USARTx_CR1寄存器的指定位
USARTx->CR
# 4. 三角定位、多边形定位算法实现
## 4.1 三角定位算法
### 4.1.1 距离测量
**双向测距法**
双向测距法是通过两个节点同时发送和接收信号来计算距离。
```python
import time
# 节点1发送信号
node1.send_signal()
# 节点2接收信号
node2.receive_signal()
# 计算时间差
time_diff = node2.receive_time - node1.send_time
# 计算距离
distance = time_diff * speed_of_light / 2
单向测距法
单向测距法仅需一个节点发送信号,另一个节点接收信号。
import time
# 节点1发送信号
node1.send_signal()
# 节点2接收信号
node2.receive_signal()
# 计算时间差
time_diff = node2.receive_time - node1.send_time
# 计算距离
distance = time_diff * speed_of_light
4.1.2 位置计算
三角定位
三角定位算法利用三个已知位置的锚节点和一个待定位节点的距离测量值来计算其位置。
import numpy as np
# 锚节点坐标
anchor1 = (x1, y1)
anchor2 = (x2, y2)
anchor3 = (x3, y3)
# 待定位节点与锚节点的距离
d1 = distance_to_anchor1
d2 = distance_to_anchor2
d3 = distance_to_anchor3
# 构建方程组
A = 2 * np.array([[x1 - x3, y1 - y3],
[x2 - x3, y2 - y3]])
b = np.array([d1**2 - d3**2 + x1**2 - x3**2 + y1**2 - y3**2,
d2**2 - d3**2 + x2**2 - x3**2 + y2**2 - y3**2])
# 求解方程组
x, y = np.linalg.solve(A, b)
# 输出待定位节点坐标
print("待定位节点坐标:", (x, y))
4.2 多边形定位算法
4.2.1 距离测量
多边形测距法
多边形测距法利用多个已知位置的锚节点和一个待定位节点的距离测量值来计算其位置。
import numpy as np
# 锚节点坐标
anchors = [(x1, y1), (x2, y2), (x3, y3), (x4, y4)]
# 待定位节点与锚节点的距离
distances = [d1, d2, d3, d4]
# 构建约束方程
constraints = []
for i in range(len(anchors)):
constraints.append(np.array([2 * (x - anchors[i][0]), 2 * (y - anchors[i][1]), 1]))
# 构建目标函数
objective = np.array([d**2 for d in distances])
# 求解二次规划问题
result = scipy.optimize.minimize(objective, x0=[0, 0], constraints=constraints)
# 输出待定位节点坐标
print("待定位节点坐标:", (result.x[0], result.x[1]))
4.2.2 位置计算
多边形定位
多边形定位算法利用多边形测距法计算的待定位节点距离测量值来计算其位置。
import numpy as np
# 锚节点坐标
anchors = [(x1, y1), (x2, y2), (x3, y3), (x4, y4)]
# 待定位节点与锚节点的距离
distances = [d1, d2, d3, d4]
# 构建约束方程
constraints = []
for i in range(len(anchors)):
constraints.append(np.array([2 * (x - anchors[i][0]), 2 * (y - anchors[i][1]), 1]))
# 构建目标函数
objective = np.array([d**2 for d in distances])
# 求解二次规划问题
result = scipy.optimize.minimize(objective, x0=[0, 0], constraints=constraints)
# 输出待定位节点坐标
print("待定位节点坐标:", (result.x[0], result.x[1]))
5. ESP8266 WiFi模块初始化与通信
5.1 ESP8266 WiFi模块简介
ESP8266 WiFi模块是一款低功耗、低成本的WiFi通信模块,广泛应用于物联网和无线通信领域。它集成了TCP/IP协议栈、无线通信接口和微控制器,可以轻松实现WiFi连接和数据传输。
5.2 ESP8266 WiFi模块初始化
ESP8266 WiFi模块的初始化主要包括以下步骤:
// 初始化GPIO引脚
gpio_init();
// 初始化串口
uart_init();
// 初始化WiFi模块
wifi_init();
// 设置WiFi模式
wifi_set_mode(WIFI_MODE_STATION);
// 连接WiFi网络
wifi_connect(ssid, password);
代码逻辑分析:
- 初始化GPIO引脚,为WiFi模块提供数据传输接口。
- 初始化串口,用于与WiFi模块进行通信。
- 初始化WiFi模块,配置模块的工作模式。
- 设置WiFi模式为STA模式,即作为客户端连接到WiFi网络。
- 连接WiFi网络,传入WiFi名称(ssid)和密码(password)。
5.3 ESP8266 WiFi模块通信
ESP8266 WiFi模块支持多种通信方式,包括TCP/IP通信、UDP通信和自定义通信协议。
5.3.1 TCP/IP通信
TCP/IP通信是一种面向连接的通信方式,具有可靠性高、数据传输顺序性好等特点。
// 创建TCP客户端
tcp_client = tcp_new();
// 连接TCP服务器
tcp_connect(tcp_client, ip_address, port);
// 发送数据
tcp_write(tcp_client, data, len);
// 接收数据
data = tcp_read(tcp_client, len);
代码逻辑分析:
- 创建TCP客户端,用于与服务器建立连接。
- 连接TCP服务器,传入服务器IP地址和端口号。
- 发送数据,传入数据缓冲区和数据长度。
- 接收数据,传入数据缓冲区和数据长度。
5.3.2 UDP通信
UDP通信是一种无连接的通信方式,具有速度快、开销低等特点。
// 创建UDP客户端
udp_client = udp_new();
// 发送UDP数据
udp_send(udp_client, ip_address, port, data, len);
// 接收UDP数据
data = udp_recv(udp_client, len);
代码逻辑分析:
- 创建UDP客户端,用于发送和接收UDP数据。
- 发送UDP数据,传入服务器IP地址、端口号、数据缓冲区和数据长度。
- 接收UDP数据,传入数据缓冲区和数据长度。
6. HTTP、MQTT或自定义通信协议
6.1 HTTP协议概述
HTTP(超文本传输协议)是一种用于在万维网上传输数据的无状态协议。它通常用于客户端(如浏览器)与服务器(如Web服务器)之间的通信。
HTTP协议基于请求-响应模型,其中客户端向服务器发送请求,服务器响应请求并返回数据。HTTP请求包含以下信息:
- 方法:指定请求类型(例如GET、POST、PUT、DELETE)
- URI:标识请求资源的统一资源标识符(URL)
- HTTP版本:指定所使用的HTTP协议版本
- 标头:包含有关请求的附加信息(例如内容类型、内容长度)
- 主体:包含请求数据的可选部分
HTTP响应包含以下信息:
- 状态代码:表示请求的状态(例如200 OK、404 Not Found)
- 标头:包含有关响应的附加信息(例如内容类型、内容长度)
- 主体:包含响应数据的可选部分
6.2 MQTT协议概述
MQTT(消息队列遥测传输)是一种轻量级消息传递协议,专为物联网(IoT)设备而设计。它基于发布/订阅模型,其中设备可以订阅主题并接收发布到该主题的消息。
MQTT协议使用TCP作为传输协议,并使用以下消息类型:
- 连接:用于建立客户端和服务器之间的连接
- 发布:用于发布消息到主题
- 订阅:用于订阅主题
- 取消订阅:用于取消订阅主题
- PINGREQ:用于检查客户端和服务器之间的连接
- PINGRESP:用于响应PINGREQ消息
6.3 自定义通信协议设计
在某些情况下,使用HTTP或MQTT协议可能并不合适,因此需要设计自定义通信协议。自定义协议的设计应考虑以下因素:
6.3.1 数据格式
自定义协议应定义用于表示数据的格式。这可以是二进制格式、文本格式或JSON格式。
6.3.2 通信流程
自定义协议应定义通信流程,包括消息类型、消息格式和消息交换顺序。
以下是一个简单的自定义通信协议示例:
sequenceDiagram
participant Client
participant Server
Client->>Server: Connect
Server->>Client: Connected
Client->>Server: Request data
Server->>Client: Data response
该协议定义了以下消息类型:
- Connect:用于建立客户端和服务器之间的连接
- Connected:用于响应连接请求
- Request data:用于请求数据
- Data response:用于响应数据请求
简介:本教程将带领你深入了解UWB定位技术,使用STM32微控制器和ESP8266 WiFi模块构建一个完整的UWB定位系统。通过实践任务,你将掌握UWB通信、STM32编程、多点定位算法、服务器通信协议和嵌入式软件开发等知识。本教程包含完整的源码,涵盖硬件电路设计、软件实现和测试验证,让你快速上手并应用UWB定位技术。

















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









