







目录
1、世界坐标系
摄像机坐标系描述三维物体的空间信息不太方便,所以引入世界坐标系,将物体从世界坐标系转换到摄像机坐标系。
2、摄像机外参数(世界坐标系->相机坐标系)
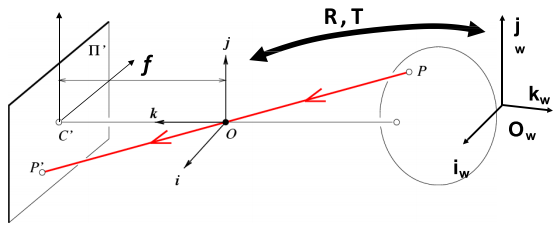
可以把世界坐标系下的点通过旋转和平移转到摄像机坐标系下,这个转换矩阵就叫相机的外参数。
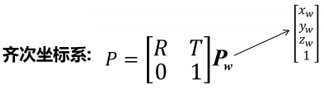
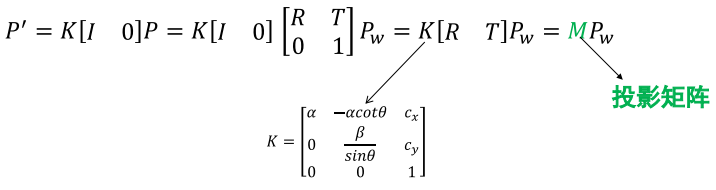
R为旋转矩阵(3*3),T为平移矩阵(3*1),Pw为世界坐标系下的点的齐次坐标(4*1),最终P也为(4*1),物理含义:世界坐标系经过R、T就会得到摄像机坐标系。外参数与摄像机排放的位置有关。
所以,完整的摄像机模型(世界坐标系下的点—>像素平面坐标系的像素)如下:
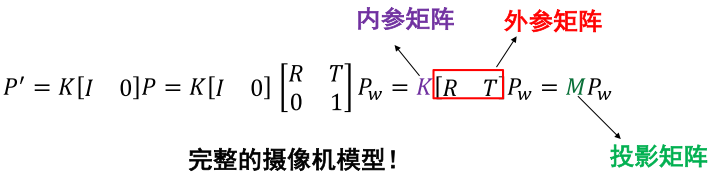
3、完整相机模型参数含义
3.1、各个符号的物理意义及其维度分别是什么
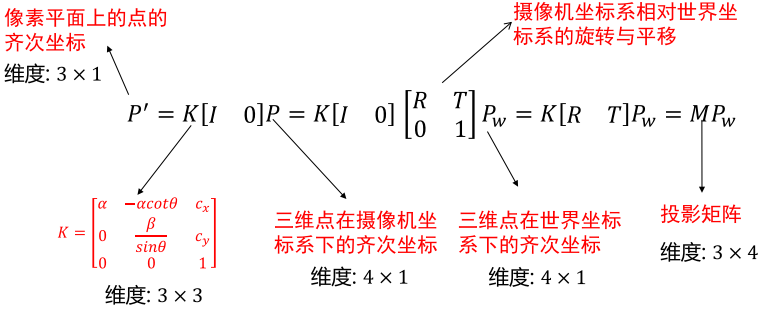
3.2、投影矩阵M有多少个自由度
外参数,旋转、平移各有3个自由度。最终,投影矩阵M有5+6=11个自由度,简单来说确定了这11个参数,M矩阵就确定了。
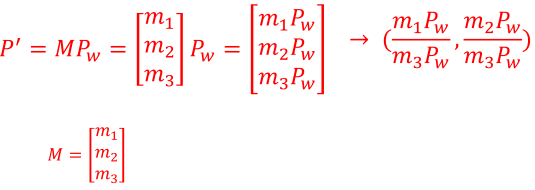
3.3、P`转换为欧式坐标如何写
把M矩阵写成行向量,M是3*4矩阵,m1、m2、m3则为1*4向量,Pw为4*1向量,mi*Pw为实数,除以最后一维,则得欧式坐标。
4、定理
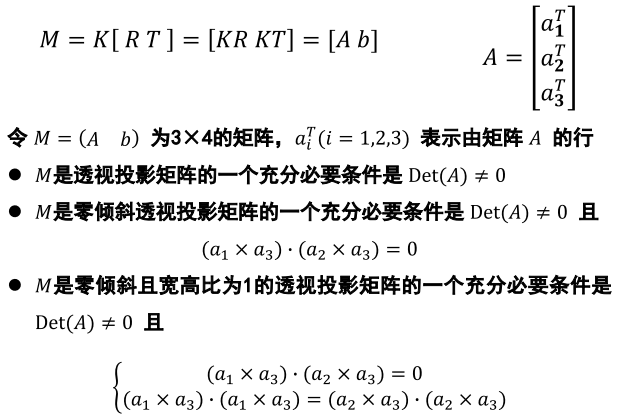
其中,ai为列向量。叉乘结果垂直于两个向量,点乘为0的向量垂直。
5、投影变换的性质
1)点投影为点;
2)线投影为线;
3)近大远小;
4)角度不再保持;
5)平行线相交。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











