







文章内容来源第一期CARA走进高校学术讲堂,如有侵权联系删除
主讲人:吴毅红

中科院自动化所,博士生导师。计算机视觉,包括摄像机标定、摄像机定位与跟踪、三维重建、多视几何学。在研课题:基于视频的实时定位与地图重建。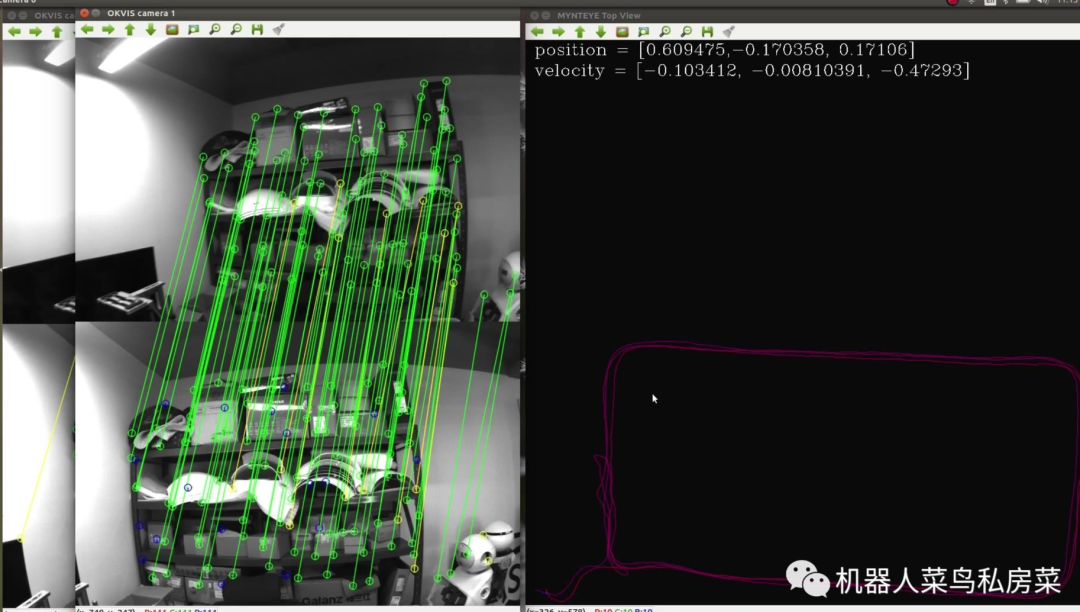

视觉定位的基本概念:根据输入的图像或视频,计算出相机在三维物理空间中的位置和姿态称为相机定位,场景中物体或运动目标在三维物理空间中的位置和姿态。
基于相机的定位

文章内容来源第一期CARA走进高校学术讲堂,如有侵权联系删除
主讲人:吴毅红
中科院自动化所,博士生导师。计算机视觉,包括摄像机标定、摄像机定位与跟踪、三维重建、多视几何学。在研课题:基于视频的实时定位与地图重建。
视觉定位的基本概念:根据输入的图像或视频,计算出相机在三维物理空间中的位置和姿态称为相机定位,场景中物体或运动目标在三维物理空间中的位置和姿态。
基于相机的定位
 1250
2511
1250
2511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















