






Formulation
假设你是一个机器人,在一条长长的马路的一头出发,期间经历了各种加速减速啥的。请问,你怎么知道自己在每一个时刻的具体位置呢?
你可能会说,这太简单了,你只要知道初始状态和两个加速度,你就能知道每个时刻的速度和位置了啊。问题当然没有那么简单,因为测量误差的存在,速度是不准的。简单点说,当机器人认为自己速度是0.2m/s的时候,它的实际速度很可能是0.21m每秒。这样的测量误差累计起来可能越来越大。
于是你想了个办法,给机器人装上个测距仪不就好了了,机器人实时测量自己离出发点的位置。但还是同样的问题,有测量就有误差。
既然测量误差不可避免,我们就要想想,我们应该多相信我们的测量呢?还有没有其他什么我们可以参考的信息吗?有,那就是预测。
开始之前,我们先定义清楚几个概念。
- 首先机器人有两个测量的传感器,一个测量距离,一个测量速度。这里距离就是状态,而速度就是状态的变化。
- 除了传感器之外,我们还可以对机器人下一位置进行预测。
- 根据过去数据对状态的预测数据 和 当前的测量数据,我们对当前状态及状态的变化进行估计。
class Robot:
def __init__(self, state=0, speed=0):
self.state = state
self.speed = speed
# 机器人的实际位置
self.actual_locations = [state]
# 为了简化模型,这是一个只会做匀加速运动的机器人
# 但其实gh-filter不需要是匀加速运动,根本不care你是什么运动
def run(self, acc=0, t=0):
if t <= 0: return
for i in range(t):
s1 = self.speed
s2 = self.speed + acc
self.state += (s1 + s2) / 2.0
self.speed = s2;
self.actual_locations.append(self.state)我们让机器人走起来,先加速8秒,然后匀速运动一段,然后再减速。
robot = Robot()
robot.run(1,8)
robot.run(0,3)
robot.run(-1,8)
robot.show_locatons()
注意了哟,上面这个图是真实位置,而实际上机器人根本不知道自己的真实位置,也不知道自己的速度,它只能通过测距仪来测量其位置。但是测距仪的测量总是会有一定的误差,有测量就有误差,有误差就有估计。
再来一遍,有测量就有误差,有误差就有估计。
我们假设这个误差的大小和速度有关,速度越大测距误差越大。然后我们画出测量传感器返回的结果看看。
def __init__(self, state=0, speed=0):
...
self.measure_locations = []
def run(self, acc=0, t=0):
...
for i in range(t):
....
# 测量的位置为真实位置加测量误差
self.measure_locations.append(self.state + self.speed * np.random.randn())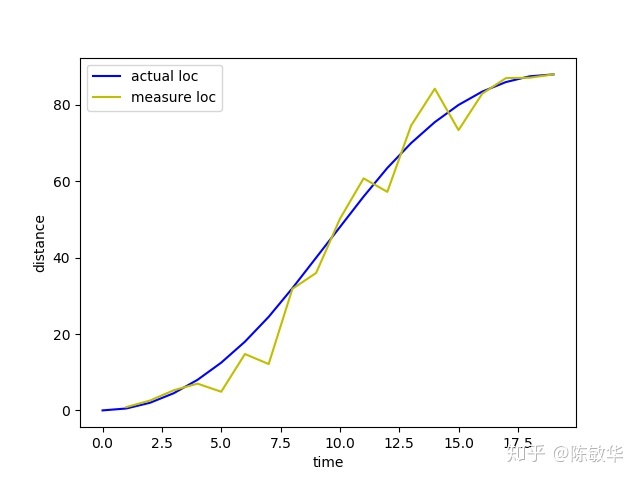
Alpha beta filter
上面的图中我们看到,虽然黄色的线并没有偏离蓝色的线太多,但是每个时刻的测量误差还是太大,我们希望通过某种技术将这个波动缩小。
这就是信号处理计算里面的滤波技术,滤除噪声(测量误差),保留信号。
That's why we call it "filter".
我们先假设这个机器人比较便宜,上面的测距仪质量非常差。机器人慢慢向前移动的过程中,测距仪返回的数字一直都是1m, 1.5m, 2.8m。 这时测距仪突然抽风了一下,返回了一个400m给机器人。机器人一下就懵逼了,“我前一秒还在2.8米的位置呢,怎么一下就跑这么远了?”。如果机器人还更聪明一点,它可能还会怀疑,“是不是我的测距仪错了?,那我到底现在在哪儿呢?”
“既然我前一秒的位置是在2.8米的地方,如果那时候我的位置没错的话,加上我还知道这段时间我运行的速度,那我应该可以算出我的位置。”机器人接着想。
“可是如果我的测距仪没坏呢?如果有一个运动飞快的人在一秒钟的时间内把我带到了这儿呢?或者我其实刚才丢掉了一些数据,其实我已经运动了半个小时了呢?”
“我到底该相信我的预测,还是相信我的测量?”,我们的机器人此时问出了最关键最关键的那个问题,“预测?还是测量?”
小孩才做选择,成年人全都要。既要预测,也要测量。不管信息对不对,不丢掉任何信息。
再来一遍哦,既要预测,也要测量,不丢掉任何信息。
先说说预测吧,要想预测,机器人得先知道自己的速度(状态变化的快慢)。一开始机器人不知道自己啥速度,就先认为自己速度是0吧,然后通过运动,他发现自己的位置在变化,于是它就可以根据这个位置的变化来计算自己的速度了。
在计算自己速度的过程中,机器人也很小心,因为它知道自己是一个便宜货(哭),他的传感器老是返回一些离谱的位置数据,这就导致它在计算自己位置的时候很容易出错,而位置一错速度的估计就错了,速度一错,位置的预测也就错了。这下好了,预测跟着测量一起错,还能相信谁?
于是机器人想到了那两个字,「惯性」。“和位置不可能说变就变一样,速度也不可能说变就变,一般情况下,每个时刻的速度应该和前一时刻的速度差不多才对。”,机器人接着想,“更棒的是,我预测出的位置和我测量的位置间的差,可能正反应了我速度的变化,我应该把这个也用上”。于是机器人决定自己测自己的速度。
class Robot:
def __init__(self, state=0, speed=0, g=0.5, h=0.5):
self.state = state
self.speed = speed
# 机器人的实际位置
self.actual_locations = [state]
self.measure_locations = []
self.measure_speed = 0.0 # 初始速度不知道,就先0吧
self.estimate_locations = [0.0]
self.est_state = 0.0 # 初始位置不知道在哪,就先0吧
self.g = 0.5
self.h = 0.5
# 这是一个只会做匀加速运动的机器人(匀速运动也是一种匀加速运动)
def run(self, acc=0, t=0):
if t <= 0: return
for i in range(t):
s1 = self.speed
s2 = self.speed + acc
self.state += (s1 + s2) / 2.0
self.speed = s2
# 测量位置等于实际位置加测量噪声
measure_state = self.state + self.speed * np.random.randn()
# 预测位置等于上一个时刻的预测位置 + 机器人认为的自己的速度
pred_state = self.est_state + self.measure_speed * 1
# residual 测量与预测的差距
residual = measure_state - pred_state
# 根据 residual 和上一个时刻机器人认为的自己的位置计算新的速度
self.measure_speed = self.measure_speed + self.h * residual
# 结合测量与预测估计当前位置
self.est_state = pred_state + self.g * residual注意上面代码中的g和h(通常在0到1之间),这两个系数用于表示机器人更相信自己的预测计算,还是传感器返回的测量数据。g和h越接近于0,表明机器人越相信自己的预测,也就是越相信自己的经验,而g和h越接近于1,则表示机器人越相信传感器传回的测量数据。
实验
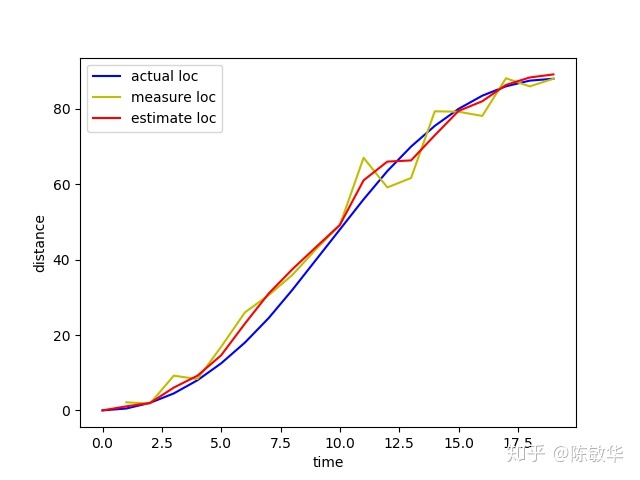
我们先来个折中一点的机器人,g=0.5, h=0.5。它既不迷信自己的测量,也不偏向自己的预测能力。我们看到位置估计的曲线相比测量值平滑了不少,而且和实际值还是非常接近的。
尤其值得注意的是,图中有几个时刻测量位置已经远远偏离了实际位置,但是机器人还是通过alpha beta filter尽可能地过滤掉了这种测量噪声,让估计值比较靠近实际值。
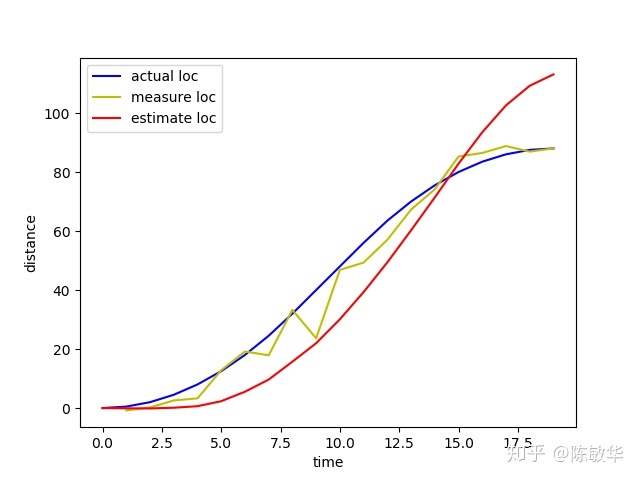
下面请欣赏g=0.1, h=0.1版的蜜汁自信机器人,这家伙基本不太care传感器说啥,非常相信自己的经验。他热衷于预测,却对身边事物缺少观察,曲线平滑少有变化,真是个固执的家伙!
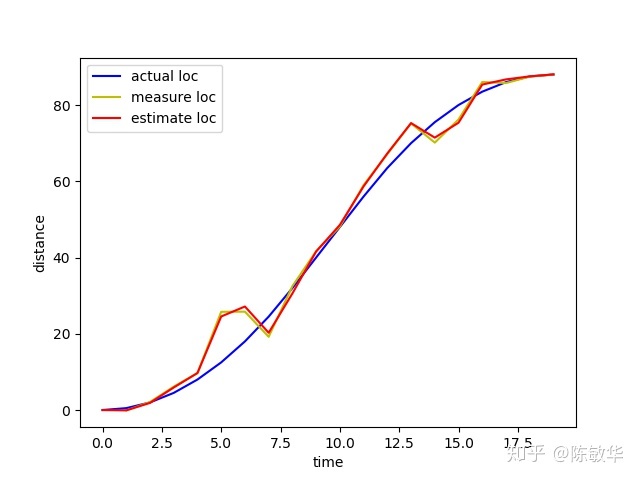
而下面这位g=0.9, h=0.9的机器人则非常相信它的传感器了,红线和黄线基本贴一起了。这家伙的毛病是几乎只观察不思考,要是哪天传感器坏了,它不知道会以为自己在哪里呢。
小结
本文中我们用alpha beta filter设计了一个机器人,它只要用一个距离传感器,就能比较准确的估计出自己当前的位置。
g和h的值是设计中的关键。如果传感器的质量非常好,或者更general的说,测量信号的信噪比更高,则可以考虑将g和h设置大一点。而如果估计的数字变化率相对比较低的,或者说状态的惯性比较大的话,则可以考虑将g和h设置小一点。具体的设置就case by case了。
而 alpha beta filter 真正的内核所在则是:
”估计 = 预测 + 测量“
或者用更bayesian的话说:
”posterior = prior + likelihood“
或者更general一点说:
Don't lose any information.
ps: 立个flag,下次准备写篇文章讲讲卡尔曼滤波,但是感觉内容太多可能讲不太清楚,试试看吧。
ps: 代码都在github上了,这里面我会陆续写一点和「估计」啊「滤波」啊有关的东西。另外,我还打算写一点和「预测」以及「近似」相关的文章。算是我的「估计、预测、近似」三部曲计划吧。
chenminhua/estimationgithub.com
大家觉得有帮助的话记得点赞呀,不然没准过两个礼拜我就忘了这事儿了哈哈。















 1434
1434











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









