







简介:本文深入讨论了一个基于AT命令集的Modem操作类,该类专为VC++环境设计。通过封装AT命令集的核心功能,简化了Modem的串行通信任务,包括初始化、拨号、数据传输和挂断等。文章提出了源码中接收线程在遇到错误时可能出现的异常终止问题,并建议了几种可能的解决方案,强调了异常处理和错误恢复策略的重要性。学习和改进这个Modem类将有助于开发者掌握串口通信技术,对嵌入式系统、物联网和远程通信应用的开发尤其有益。 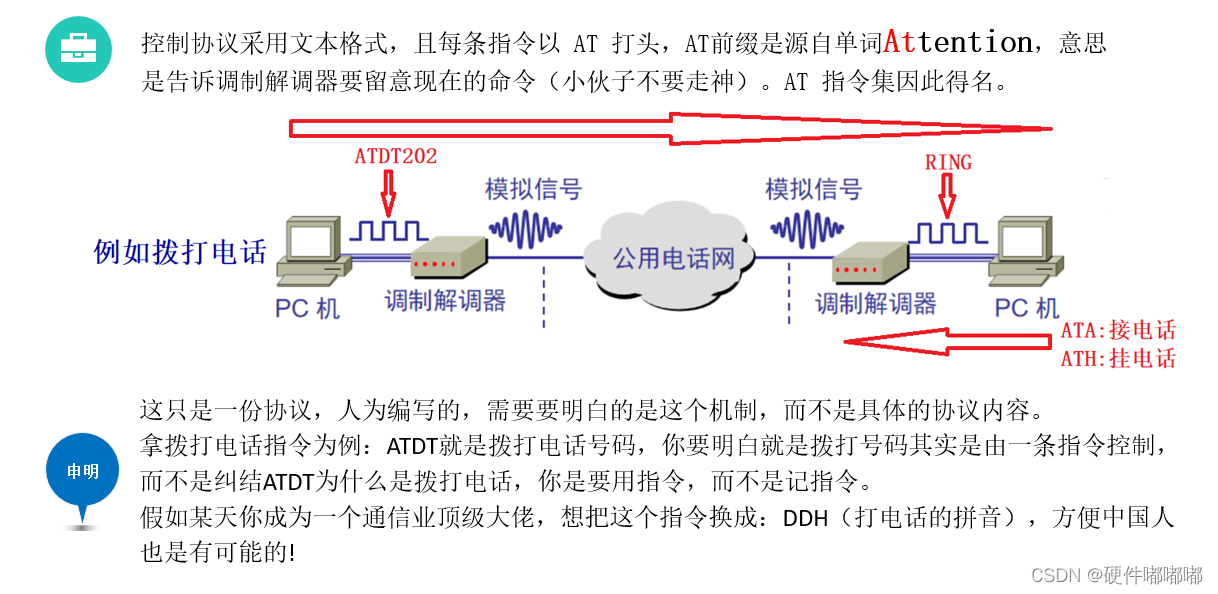
1. AT命令集基础
AT命令集是通过串行接口进行控制通讯设备(如Modem)的一系列指令,最早由Hayes公司制定,是通讯设备接口控制的工业标准。这些命令通常由电脑通过串口发送给Modem,指示Modem执行特定的功能。
历史背景
AT(Attention)命令的历史可追溯至1980年代,当时随着个人电脑的普及和电话网络的发展,Hayes推出了一系列命令,以便电脑能够控制Modem进行拨号、挂断等操作。这些命令随着通讯技术的进步被不断扩展和标准化,如今被广泛应用于各种通讯设备中。
基本语法及结构
AT命令由前缀 AT (代表Attention)和具体的指令组成,例如 ATD 用于拨打电话号码。命令结束后需添加回车符 \r 或 \r\n ,以指示命令的结束。一个典型的AT命令如下所示:
ATD***\r
这条命令指示Modem拨打数字***。
AT命令的分类和作用
AT命令主要分为几类,包括网络服务指令、音频控制指令、呼叫控制指令等,分别用于管理Modem连接、处理音频信号、设置呼叫参数等。每一类指令都有其特定的用途,例如: - AT+CMGS 用于发送短信。 - AT+CREG? 用于查询网络注册状态。
AT命令在Modem通信中的核心地位不可替代,它允许用户和设备通过简洁的文本接口与Modem进行交互,实现对网络连接的控制。
总结
AT命令集作为通信设备控制的基石,让开发者可以利用简单的文本指令与设备进行交互,实现复杂的网络通信功能。了解AT命令集的基础知识,是进行Modem通信应用开发的前提。在后续章节中,我们将深入探讨如何在实际应用中使用AT命令集,并探索如何在VC++环境下封装和使用这些命令来实现通信功能。
2. Modem通信操作类封装
2.1 Modem通信类的设计原则
2.1.1 封装的目的与优势
在现代软件开发实践中,面向对象编程(OOP)的一个重要原则是封装,它有助于将数据和处理数据的方法绑定在一起,并隐藏内部实现细节。封装对于Modem通信操作类而言尤为关键,因为它不仅简化了使用模型,还增强了代码的可维护性和可重用性。
封装可以通过定义公共接口使Modem通信操作变得简单和直观。例如,类可以提供一个初始化方法,允许调用者通过一组清晰定义的参数完成Modem的设置,而无需了解通信协议或硬件细节。这种透明度极大地降低了开发的复杂度,并有助于避免由于直接与硬件交云而引起的潜在错误。
优势方面,封装确保了接口的一致性,即使底层实现发生变化,用户代码也不需要修改。此外,封装还可以通过权限控制实现数据保护,防止外部代码意外或恶意修改对象状态。
2.1.2 类设计的结构和功能分布
为了有效地封装Modem通信操作类,我们需要考虑合理的结构和功能分布。通常,类的设计应该遵循单一职责原则,即每个类只有一个改变的理由。
在设计Modem通信操作类时,我们可以将其分为几个主要部分:
- 初始化与配置 :负责Modem的启动和设置,包括串口设置、波特率、数据位等。
- 命令发送与响应处理 :负责构造AT命令并发送到Modem,同时接收响应并进行解析。
- 状态监测与事件通知 :监控Modem的状态变化,并在检测到特定事件时(如连接或断开),通知用户或调用其他服务。
通过将这些功能分离成不同的部分,我们不仅使代码更加清晰,还能够针对每个部分单独进行测试和优化。
2.2 Modem操作类的关键方法
2.2.1 初始化与配置方法
在创建Modem操作类实例时,必须首先对其进行初始化。初始化通常包括设置通信参数和进行必要的硬件检查。以下是一个初始化方法的伪代码示例:
class Modem {
public:
bool initialize(string portName, int baudRate, int dataBits);
// 其他初始化相关方法...
};
bool Modem::initialize(string portName, int baudRate, int dataBits) {
// 打开串口
serialPort.open(portName);
if (!serialPort.is_open()) {
return false;
}
// 设置串口参数
serialPort.set_option(baudRate);
serialPort.set_option(dataBits);
// 更多初始化代码...
return true;
}
2.2.2 命令发送与响应处理
Modem操作类的核心功能之一是发送AT命令并处理响应。发送和接收通常通过串口进行,类需要提供相应的接口来封装这些操作。以下是一个简化的方法示例:
bool Modem::sendCommand(const string& command, string& response) {
// 发送命令到Modem
serialPort.write(command + "\r\n");
// 读取响应
string buffer;
char ch;
while (serialPort.readsome(&ch, 1) > 0) {
buffer += ch;
if (ch == '\n') { // 假设响应以换行符结束
break;
}
}
// 解析响应
response = parseResponse(buffer);
return !response.empty();
}
2.2.3 状态监测与事件通知
Modem的状态变化可能影响应用程序的逻辑,例如网络连接的变化。Modem操作类应能够检测这些状态变化并通知感兴趣的组件。
void Modem::addEventListener(const string& eventName, function<void()> callback) {
// 事件监听器映射表
eventListeners[eventName].push_back(callback);
}
void Modem::notifyEvent(const string& eventName) {
// 触发事件
if (eventListeners.find(eventName) != eventListeners.end()) {
for (auto& cb : eventListeners[eventName]) {
cb();
}
}
}
// 使用示例
modem.addEventListener("connectionChanged", [](){
cout << "Modem connection has changed" << endl;
});
2.3 类封装中的数据管理
2.3.1 缓冲区管理
由于Modem通信可能涉及大量数据的接收和处理,合理管理缓冲区至关重要。这通常意味着实现缓冲区的动态分配、读写管理以及溢出保护。
class BufferManager {
private:
deque<char> buffer;
size_t maxBufferSize;
public:
BufferManager(size_t maxBufferSize) : maxBufferSize(maxBufferSize) {}
void push(char data) {
if (buffer.size() >= maxBufferSize) {
buffer.pop_front(); // 删除最旧的数据
}
buffer.push_back(data);
}
string getContents() const {
return string(buffer.begin(), buffer.end());
}
// 更多缓冲区管理方法...
};
2.3.2 日志记录与错误报告
为了便于调试和问题诊断,Modem操作类应该记录通信过程中的关键事件,包括发送和接收的数据、错误和异常。日志记录可以使用标准库中的日志系统,或构建自定义日志框架。
class Logger {
public:
void log(const string& message);
void logError(const string& errorMessage);
// 其他日志相关方法...
};
void Logger::log(const string& message) {
// 将日志信息输出到控制台或文件
cout << "LOG: " << message << endl;
}
void Logger::logError(const string& errorMessage) {
// 输出错误信息,并可能同时通知相关人员
cerr << "ERROR: " << errorMessage << endl;
}
此外,日志级别可以设置为调试(Debug)、信息(Info)、警告(Warn)、错误(Error)等,以适应不同情况下的信息需求。
这样,Modem通信操作类的封装和数据管理就得到了合理的设计和实现,为后续的实现和优化打下了坚实的基础。
3. VC++环境下Modem通信
3.1 VC++开发环境的配置
3.1.1 开发工具与库的准备
在VC++环境下进行Modem通信的开发,首先要确保所需的开发工具和库文件都已经准备就绪。常用的开发工具有Visual Studio,它提供了一个集成的开发环境,便于代码编写、编译和调试。库文件通常包括Windows API函数库、串口通信库以及第三方提供的通信协议库等。开发者需要根据Modem设备的型号和通信协议的要求,下载并安装必要的SDK或API库。
3.1.2 环境设置与调试工具使用
安装完毕后,接下来是环境的配置。在Visual Studio中创建新的项目时,需要选择合适的项目模板,通常是Win32控制台应用程序或者MFC应用程序。在项目属性中配置编译器选项,链接器选项,包括指定库文件的路径、包含目录以及附加依赖项等。
在代码编写和调试阶段,了解和使用Visual Studio提供的调试工具是非常重要的。这些工具包括断点设置、变量监视、内存查看等,能够帮助开发者定位代码中的错误和性能瓶颈。特别是在处理串口通信的异步操作时,这些调试工具显得尤为重要。
3.2 在VC++中实现Modem通信
3.2.1 创建Modem通信项目
创建一个VC++项目用于实现Modem通信,通常我们会从一个基本的Win32控制台项目开始。项目创建后,首先需要包含串口通信相关的头文件,如 windows.h ,它包含了用于串口操作的Win32 API函数声明。接下来,需要编写一个初始化串口通信环境的函数,这通常涉及到调用 CreateFile 函数打开串口设备、配置串口属性(如波特率、数据位、停止位等),并准备好用于数据发送和接收的缓冲区。
HANDLE hSerial = CreateFile(L"COM3", GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0);
if (hSerial == INVALID_HANDLE_VALUE) {
// Handle error
}
DCB dcbSerialParams = {0};
dcbSerialParams.DCBlength = sizeof(dcbSerialParams);
if (!GetCommState(hSerial, &dcbSerialParams)) {
// Handle error
}
dcbSerialParams.BaudRate = CBR_9600; // 设定波特率
dcbSerialParams.ByteSize = 8; // 数据位
dcbSerialParams.StopBits = ONESTOPBIT; // 停止位
dcbSerialParams.Parity = NOPARITY; // 无校验位
if (!SetCommState(hSerial, &dcbSerialParams)) {
// Handle error
}
3.2.2 调用封装好的Modem操作类
为了提高代码的可读性和可维护性,可以创建一个Modem操作类,封装初始化、配置、命令发送、状态监测等功能。类的设计要遵循面向对象的原则,使得各个功能块独立且易于替换。在主程序中创建Modem操作类的实例,并调用相应的方法来完成通信任务。
Modem modem;
modem.initialize(L"COM3");
modem.configure(9600, 8, 1, NOPARITY);
modem.sendCommand(L"AT+CMGF=1\r\n"); // 发送AT命令
3.2.3 进行通信流程控制
在通信过程中,需要合理地控制数据的发送和接收。可以使用 WaitCommEvent 函数监听串口事件,结合多线程技术,分别处理数据发送和接收。使用 ReadFile 和 WriteFile 函数进行数据的读取和写入操作。需要注意的是,这些操作都应该是非阻塞的,并且需要考虑到错误处理和异常情况。
DWORD bytes_read;
DWORD bytes_written;
BYTE read_buffer[1024];
BYTE write_buffer[] = "AT+CMGS=\"+***\"\r";
while (true) {
if (WaitCommEvent(hSerial, &dwEvent, NULL)) {
switch (dwEvent) {
case EV_RXCHAR:
// 读取串口数据
if (!ReadFile(hSerial, read_buffer, sizeof(read_buffer), &bytes_read, NULL)) {
// Handle error
}
break;
case EV_TXEMPTY:
// 发送数据结束
break;
// 处理其他事件
}
} else {
// Handle error
}
}
3.3 Modem通信的实例分析
3.3.1 典型应用场景的实现步骤
在本节中,我们将通过一个具体的例子来讲解Modem通信的实现步骤。假设我们的应用场景是通过Modem发送和接收短信。首先,需要初始化Modem并配置好串口,然后发送AT命令设置为文本模式,接着发送AT命令以注册短信服务中心的地址,最后发送AT命令来发送短信。
3.3.2 问题诊断与调试技巧
在实际开发中,经常会遇到通信失败或者不稳定的情况。在这样的情况下,开发者需要利用已有的调试技巧来进行问题诊断。常见的问题可能包括串口未正确配置、Modem指令未正确发送或接收、线程同步问题等。使用日志记录功能可以帮助开发者记录通信过程中的关键信息,这对于定位问题非常有帮助。同时,使用调试器进行单步跟踪,观察变量和程序流程,也能够帮助开发者理解程序的运行状态。
// 示例:日志记录功能
void logMessage(const std::wstring& message) {
std::wofstream logFile(L"log.txt", std::ios::app);
logFile << message << std::endl;
logFile.close();
}
在VC++环境下实现Modem通信涉及到许多细节,本章针对开发环境配置、项目创建、封装类的使用、通信流程控制、以及问题诊断与调试等方面进行了深入探讨。在第四章中,我们将继续深入了解错误处理和异常恢复策略,以及如何优化通信流程。
4. 错误处理和异常恢复策略
在进行Modem通信的过程中,错误处理和异常恢复策略是确保通信稳定性和可靠性的关键环节。本章将深入探讨如何构建有效的错误处理机制、设计异常恢复流程,以及通过错误日志分析与优化提升整体通信系统的性能和效率。
4.1 错误处理机制的构建
4.1.1 错误类型与处理策略
在Modem通信过程中,可能遇到的错误类型包括但不限于网络错误、硬件故障、协议违规和超时等。每种错误都有其特定的处理策略。例如,网络错误可以通过重试策略来处理,而硬件故障则可能需要提醒用户进行维修或替换硬件。
为了有效地处理这些错误,我们需要构建一个结构化的错误处理机制,将错误类型进行分类,并针对每一类错误制定相应的处理策略。这通常涉及到编程时使用异常处理语句,如try-catch块,在VC++环境中捕获可能出现的异常情况。
try {
// 尝试执行的代码块
modem->SendCommand("AT+CMGS=\"+***\"");
} catch (const std::exception& e) {
// 异常捕获处理
LogError("Exception occurred: " + std::string(e.what()));
}
在上面的代码示例中,我们尝试发送一个AT命令给Modem,并使用try-catch块来捕获可能抛出的任何异常。捕获到异常后,将错误信息记录到日志中。
4.1.2 错误捕获与异常安全保证
异常安全保证是指在发生异常时,程序能够确保不留下资源泄露或其他不稳定状态。在Modem通信中,这意味着无论发生何种错误,通信系统都应保证资源的正确释放,并确保系统状态的一致性。
实现异常安全保证通常需要遵循以下原则: - 基本保证 :确保异常发生时,程序资源处于一种有效状态,但对象的不变量可能无法保持。 - 强保证 :异常发生时,程序的状态应与异常发生前完全相同,例如使用事务处理模式。 - 不抛出保证 :承诺在该操作中不会抛出异常,这对于构建异常安全的系统至关重要。
class Modem {
public:
void SendCommand(const std::string& command) {
try {
// 发送命令的实现
} catch (const std::exception& e) {
// 确保即使发生异常,Modem状态也保持一致
ResetModem();
throw;
}
}
private:
void ResetModem() {
// 重置Modem到初始状态
}
};
4.2 异常恢复流程设计
4.2.1 自动重连机制
为了提高通信系统的稳定性和可用性,自动重连机制是必不可少的。当检测到连接丢失或通信中断时,自动重连机制会尝试重新建立连接。这通常通过定时器实现,在连接失败后经过一定时间间隔后重试连接。
class Modem {
public:
void Connect() {
// 尝试连接Modem
bool connected = false;
int maxAttempts = 5;
for (int i = 0; i < maxAttempts; ++i) {
if (TryConnect()) {
connected = true;
break;
}
std::this_thread::sleep_for(std::chrono::seconds(5)); // 等待5秒后重试
}
if (!connected) {
throw std::runtime_error("Failed to connect to Modem after multiple attempts.");
}
}
private:
bool TryConnect() {
// 实现尝试连接Modem的逻辑
// 如果成功返回true,失败返回false
}
};
4.2.2 重发机制与定时器的运用
在某些情况下,网络错误或短暂的通信问题可能会导致命令发送失败。重发机制允许在初次发送失败后,自动重新发送命令,直到成功或达到最大尝试次数。
定时器的使用可以控制重发的频率和时间间隔,避免对网络和Modem设备造成不必要的压力。
class CommandSender {
public:
void SendCommandWithRetry(const std::string& command, int maxAttempts) {
int attempts = 0;
while (attempts < maxAttempts) {
if (SendCommand(command)) {
return;
}
std::this_thread::sleep_for(std::chrono::seconds(10)); // 等待10秒后重发
attempts++;
}
throw std::runtime_error("Failed to send command after " + std::to_string(maxAttempts) + " attempts.");
}
private:
bool SendCommand(const std::string& command) {
// 实现发送命令的逻辑,如果成功返回true,失败返回false
}
};
4.3 错误日志分析与优化
4.3.1 日志内容与级别设置
错误日志是调试和分析问题的关键工具。在构建错误处理机制时,需要为不同类型的错误设置合适的日志级别和内容。常见的日志级别包括DEBUG、INFO、WARNING、ERROR和CRITICAL。通过合理设置这些级别,可以更有效地过滤和检索日志信息。
enum LogLevel {
DEBUG,
INFO,
WARNING,
ERROR,
CRITICAL
};
class Logger {
public:
void LogMessage(const std::string& message, LogLevel level) {
// 实现日志记录逻辑,根据level不同进行格式化输出
}
};
4.3.2 日志分析工具与方法
错误日志的分析需要借助特定的工具和方法。日志分析工具有助于自动化地扫描、过滤和识别日志中的关键信息。常用的日志分析方法包括使用正则表达式匹配关键信息、使用日志聚合工具整合多个日志文件,以及利用脚本自动化日志的搜索和统计工作。
4.3.3 根据日志信息优化系统性能
对日志信息进行深入分析后,可以发现通信系统中的性能瓶颈和潜在问题。例如,频繁的重发机制可能表明网络连接不稳定,需要优化网络配置或选择更加稳定的通信通道。通过对日志数据的分析,可以逐步调整和优化系统配置,提高系统的整体性能和稳定性。
5. 接收线程管理与优化
在现代的网络编程中,接收线程是负责从网络接口或串口接收数据的核心组件。为了保证应用的高性能和稳定性,设计和管理接收线程显得尤为重要。本章节将探讨接收线程的设计原则,核心功能实现,以及管理优化技巧。
5.1 接收线程的设计原则
设计接收线程时需要考虑多个维度,比如架构模型的选择、同步机制、资源管理等,以确保线程的稳定性和效率。
5.1.1 多线程模型与选择理由
在Windows系统中,常见的多线程模型包括用户界面线程、工作线程和守护线程。针对接收线程,一般选择工作线程模型。工作线程专注于数据处理任务,对于系统资源的占用较小,且不会影响用户界面的响应性。选择工作线程模型的理由在于它能够高效地处理阻塞操作,如数据接收和解析,同时保持程序界面的流畅运行。
5.1.2 线程同步与资源管理
线程同步是多线程编程中不可忽视的环节。资源管理是同步机制中的一个重要方面,尤其是在接收线程中管理数据缓冲区时。资源管理不当会导致数据丢失、内存泄漏等问题。常用的同步机制包括临界区(Critical Section)、互斥锁(Mutex)和信号量(Semaphore)。例如,在数据接收过程中使用临界区可以确保缓冲区在任一时刻只被一个线程访问,保证数据完整性和线程安全。
5.2 接收线程的核心功能实现
接收线程的核心功能是能够可靠地从数据源接收数据,并将其存入缓冲区供后续处理。
5.2.1 数据接收与缓存策略
数据接收和缓存是接收线程实现中最为核心的部分。这通常涉及到IO完成端口(I/O Completion Ports)的使用,尤其在处理大量数据时,能够大幅提高系统的吞吐量和扩展性。接收线程会从完成端口中获取已经完成的异步读取操作,并将数据存入预定义大小的缓冲区中。线程安全的队列(如 ConcurrentQueue )是实现缓冲区的一个好选择,因为它可以无锁地进行入队和出队操作,并且保证了多线程访问的数据一致性。
// 示例:使用 .NET 中的 ConcurrentQueue 作为数据缓冲区
ConcurrentQueue<byte[]> bufferQueue = new ConcurrentQueue<byte[]>();
// 假设 dataReceived 是从数据源接收的数据
byte[] dataReceived = ...;
bufferQueue.Enqueue(dataReceived);
5.2.2 线程间通信机制
线程间通信机制允许不同的线程之间交换数据或信号。在接收线程中,使用线程安全的消息队列可以实现线程间的数据传递。例如,使用信号量(Semaphore)控制线程间的同步,接收线程在数据入队后通过信号量通知处理线程。
// 示例:使用信号量控制线程间的同步
HANDLE semaphore = CreateSemaphore(NULL, 0, 1, NULL);
// 接收线程接收数据并放入缓冲队列后
ReleaseSemaphore(semaphore, 1, NULL);
// 处理线程等待接收数据
WaitForSingleObject(semaphore, INFINITE);
5.3 线程管理的优化技巧
优化接收线程,不仅需要考虑功能实现,还要关注性能分析、避免死锁、饥饿现象及线程安全等问题。
5.3.1 避免死锁与饥饿现象
死锁是多线程编程中的一个常见问题,它发生在两个或多个线程互相等待对方释放资源。饥饿现象则是由于资源竞争导致某些线程长时间无法获得CPU时间片或所需资源。为了避免这些情况,可以通过合理设计资源请求顺序、使用超时机制来释放资源,以及保证线程的优先级合理分配来解决。
5.3.2 性能分析与优化方法
性能分析是优化接收线程的关键步骤。通过监控线程的CPU使用率、内存占用、线程数量等指标,可以发现性能瓶颈。常见的优化方法包括减少锁的范围和时间,使用无锁编程技术,优化数据结构和算法等。例如,在 .NET 环境下,可以使用 Stopwatch 类进行性能分析:
// 示例:使用 Stopwatch 进行性能监控
using System.Diagnostics;
Stopwatch stopwatch = Stopwatch.StartNew();
// 任务执行
long elapsedMs = stopwatch.ElapsedMilliseconds;
5.3.3 线程安全与异常处理
线程安全是接收线程设计中不可或缺的部分。为确保线程安全,需要对共享资源实施适当的锁定和同步策略。异常处理也是保证线程稳定运行的关键。例如,在捕获到异常时,应该将异常信息记录到日志中,并执行适当的恢复操作或清理资源,防止线程因异常退出。
try
{
// 线程的业务逻辑
}
catch (Exception ex)
{
// 记录异常信息到日志
LogException(ex);
// 执行清理和资源释放操作
}
优化接收线程,不仅要注重功能的实现,更要关注其稳定性、性能和可扩展性。通过上述分析,我们可以看到合理的线程设计原则、核心功能实现及管理优化对于创建一个高效的接收线程至关重要。接下来,在第六章中,我们将深入探讨串口通信技术的掌握。
6. 串口通信技术掌握
6.1 串口通信基础理论
串口通信(Serial Communication)是一种常见的数据传输方式,它将数据以位为单位逐个进行传输。与并行通信相比,串口通信的数据传输速率较慢,但具有成本低廉、连接简单的特点。在串口通信中,数据是通过一个单一的信号线按顺序进行发送和接收的。
6.1.1 串口通信的工作原理
串口通信主要依赖于 UART(通用异步收发传输器)芯片来实现数据的发送和接收。在发送端,数据首先通过一个信号变换过程转换为适合于串行传输的信号,然后通过串行接口发送出去。接收端的串口设备通过逆向过程将信号还原成数据。典型的串口通信设置包括数据位、停止位、校验位和波特率等参数的配置。
6.1.2 串口数据的发送与接收机制
在串口通信中,数据的发送和接收机制是核心。发送机制涉及数据的准备、组装成帧、串行传输和最终的信号转换。接收机制则包含信号的捕获、数据的重新组装和错误检测。通信的双方必须就传输参数达成一致,才能正确地发送和接收数据。
6.2 串口通信在Modem中的应用
Modem(调制解调器)通过串口与计算机连接,实现数据的调制和解调,最终通过电话线或其他介质传输。串口配置和参数设置在Modem通信中极为重要。
6.2.1 串口配置与参数设置
串口配置包括波特率、数据位、停止位和校验方式等。在Modem通信中,这些设置需要与远端设备相匹配。例如,一个典型的设置可能为9600波特率、8数据位、1停止位和无校验位。配置不当可能导致通信失败或数据错误。
6.2.2 Modem通信中的串口编程要点
串口编程要点涉及如何在软件层面上正确地控制Modem。这包括初始化串口、设置通信参数、打开和关闭串口、读写数据等。在VC++环境下,通常使用WinAPI函数或第三方库来实现这些功能。开发者需要对API的使用有深入理解,以确保通信过程的稳定和高效。
6.3 串口通信高级技术
随着技术的发展,串口通信已不仅仅局限于基本的通信方式,而是扩展到了更高级的应用和安全策略。
6.3.1 高级数据校验与纠错算法
为了提高数据传输的可靠性,串口通信中会采用各种数据校验和纠错算法。常见的有奇偶校验、循环冗余校验(CRC)等。这些算法可以在一定程度上检测并纠正数据传输中的错误。
6.3.2 串口通信的调试与故障排除
串口通信的调试过程往往需要借助特定的工具,如串口监视器、逻辑分析仪等。这些工具可以帮助开发者观察和分析数据流、时序问题等。故障排除则需要对通信协议、硬件配置和软件代码都有深入的了解。
6.3.3 串口通信安全策略与实施
串口通信虽然在安全方面不如网络通信那样复杂,但也需要采取一定的安全策略。例如,可以使用密码保护、数据加密和访问控制等方法来增强安全性。对于重要的通信应用,还需要考虑防篡改和防重放攻击的措施。
以上内容展示了串口通信在Modem应用中的重要性和相关技术细节。开发者需要掌握这些技术要点,才能在IT和通信领域中有效利用串口通信解决实际问题。
简介:本文深入讨论了一个基于AT命令集的Modem操作类,该类专为VC++环境设计。通过封装AT命令集的核心功能,简化了Modem的串行通信任务,包括初始化、拨号、数据传输和挂断等。文章提出了源码中接收线程在遇到错误时可能出现的异常终止问题,并建议了几种可能的解决方案,强调了异常处理和错误恢复策略的重要性。学习和改进这个Modem类将有助于开发者掌握串口通信技术,对嵌入式系统、物联网和远程通信应用的开发尤其有益。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









