







简介:CAN总线是一种关键的多主站串行通信协议,在燃料电池轿车动力系统中承担着数据交换、故障诊断、能量管理、安全控制、简化布线和提高系统扩展性的重要角色。本文档详细探讨了CAN总线在2007年燃料电池轿车中的具体应用案例,展示了它如何优化动力系统的性能和可靠性,对于理解CAN总线在实际动力系统中的应用具有重要参考价值。 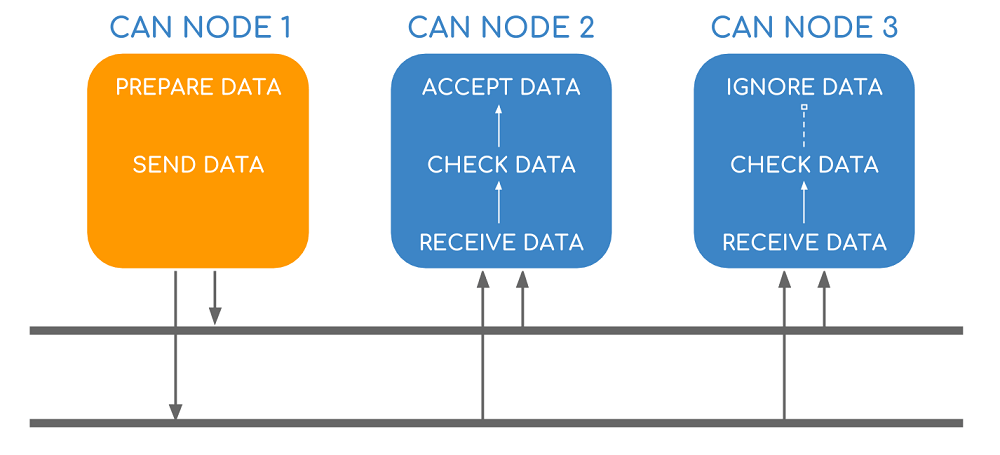
1. CAN总线基础及在汽车电子领域的应用
1.1 CAN总线的基本概念与原理
控制器局域网络(CAN)总线是一种可靠的车载网络通信协议,最初由德国博世公司为汽车应用设计。它基于“多主”通信机制,支持节点间无需主机控制即可进行数据交换。CAN总线采用非破坏性仲裁技术和消息优先级概念,确保高优先级的消息能即时传输,而不会被低优先级的消息干扰。在数据包中,ID标识符用于仲裁,并决定消息的优先级。
1.2 CAN总线在汽车电子领域的应用概述
随着汽车电子技术的发展,CAN总线已经成为汽车内部通信的行业标准。它被广泛应用于引擎控制单元(ECU)、变速箱控制单元、防抱死制动系统(ABS)以及其他各种车辆控制系统之间。CAN总线使得车辆上的各种电子控制模块能够高效地共享信息,增强了车辆性能与安全,同时降低了线束复杂度和生产成本。
1.3 CAN总线与工业自动化的关系
除了在汽车领域发挥重要作用外,CAN总线同样在工业自动化领域有广泛应用。特别是在制造系统中,如机器人控制、运动控制、过程自动化等,CAN总线提供了一种分散式控制与实时数据交换的解决方案。利用CAN总线,工业设备可以实现无缝集成,提升生产效率和可靠性。此协议的高可靠性和实时性,使得它成为工业应用中不可或缺的通信工具。
2. ```
第二章:燃料电池轿车动力系统分析
2.1 燃料电池轿车动力系统概述
燃料电池轿车的动力系统是一种将化学能直接转换为电能的装置,它避免了内燃机中能量转换的中间环节,从而大大提高了能量转换效率。这种动力系统的核心组件是燃料电池堆,它通过将氢气和氧气进行电化学反应,生成水和电能。
燃料电池的动力系统通常包括以下部分:燃料电池堆、空气供应系统、氢气供应系统、冷却系统和控制系统。这些系统相互协作,确保动力系统的高效和稳定运行。
燃料电池堆由多个单电池组成,单电池之间通过串联和并联的方式连接起来,从而达到所需的电压和电流。空气供应系统负责向燃料电池堆提供适量的氧气,而氢气供应系统则提供所需的氢气。冷却系统用于维持燃料电池堆的温度在一个稳定的范围内,以保证反应效率。控制系统则是动力系统的大脑,负责监控和调节整个系统的运行状态。
2.2 动力系统各组件的功能与协作
燃料电池堆是动力系统的核心,它的主要功能是电化学反应,生成电能。反应产生的副产品是水和少量热能,这些副产品可以被利用来加热车辆,以提高能源的综合利用率。
空气供应系统包含空气压缩机和相应的管道,它的功能是提供足够的氧气供燃料电池堆使用。通过精确控制进入燃料电池堆的氧气量,可以有效地控制电池的输出功率。
氢气供应系统主要由氢气罐和相关的输送管道组成。它的任务是确保氢气安全、稳定地输送到燃料电池堆。由于氢气易燃易爆,因此在设计和运行氢气供应系统时,安全措施至关重要。
冷却系统的作用是将燃料电池堆在反应过程中产生的多余热量传递出去,防止过热。冷却系统通常采用液体冷却的方式,使用冷却液循环来带走多余的热量。
控制系统是动力系统的重要组成部分,它通过传感器和执行器来监测各个系统的状态,如温度、压力、湿度等,然后根据预设的程序或动态调整,指挥各个系统协同工作,以保证动力系统的高效和稳定输出。
2.3 CAN总线在动力系统中的角色与功能
CAN总线在燃料电池轿车动力系统中扮演着至关重要的角色。它作为动力系统中各个组件之间数据通信的桥梁,确保信息可以快速、准确地传输。
在燃料电池轿车中,CAN总线不仅用于动力系统的实时数据交换,它还在监控整个动力系统的运行状态、诊断系统故障等方面发挥作用。通过CAN总线网络,控制系统可以接收到空气供应系统、氢气供应系统、冷却系统及燃料电池堆本身的工作参数,并实时调整各系统的运行状态以达到最优工作点。
CAN总线还能够支持动力系统的扩展性和升级。在未来的系统升级中,通过增加新的节点或者调整控制逻辑,可以进一步提高系统的性能,或者增加新的功能,如远程监控和数据记录等。
此外,CAN总线还可以帮助实现系统的故障诊断和维护。当系统出现异常时,CAN总线上可以迅速传递诊断信息和故障代码,让技术人员快速定位问题所在,及时进行维修和更换,保障车辆的安全运行。
在燃料电池轿车动力系统中,CAN总线技术的应用极大地提高了系统的控制精度和可靠性,也为将来进一步的技术创新和优化预留了空间。
这一章节展示了燃料电池轿车动力系统的详尽组成和工作原理,并分析了CAN总线在这一系统中的关键作用。通过深入的解释,提供了技术细节和实际应用案例,从而使得内容对IT行业和相关行业中的专业人士具有吸引力。
# 3. 数据交换与实时通信机制
## 3.1 数据交换的基本要求与挑战
在汽车电子领域,数据交换是确保车辆各个控制单元间通信准确无误的关键。数据交换的实现需要遵循以下几个基本要求:数据的实时性、准确性和完整性。汽车电子控制单元之间需要频繁交换控制命令、状态信息和故障诊断数据,这些信息的传递必须以极短的延迟完成,以保证系统的同步性和可靠性。数据交换面临的挑战包括电磁干扰、恶劣的环境条件以及有限的带宽资源。
### 电磁干扰
汽车环境中的电磁干扰问题是数据交换的一大挑战。从发动机的点火系统到电力驱动器,再到其它各种电子控制单元的开关操作,都会产生干扰信号。电磁干扰可能导致数据传输错误,影响数据的准确性和完整性。为了减少干扰的影响,采用了差分信号传输技术,如在CAN总线中使用的差分信号。
### 环境条件
汽车所处的环境条件多变,温度、湿度和震动等因素对数据交换的稳定性构成威胁。极端温度条件可能会导致电子元件性能的波动,进而影响信号的传输。湿度增加可能会造成电路短路的风险,震动则可能影响连接器的稳定性。因此,汽车电子设计时必须考虑到这些因素,确保数据交换系统能在各种环境下稳定工作。
### 带宽资源限制
数据交换还受到带宽资源的限制。虽然CAN总线具有较高的通信效率和良好的容错性,但相比其他高速网络协议,如以太网,其带宽仍然有限。在设计通信协议时,需要合理分配带宽资源,确保关键任务获得足够的传输优先级和带宽,同时要优化数据包的大小和格式,以适应有限的带宽。
## 3.2 CAN总线实时通信的优势与案例分析
CAN总线作为一种实时通信协议,已被广泛应用于汽车电子领域。与传统的通信总线相比,CAN总线具有许多优势,特别是在实时通信方面。
### 实时性
CAN总线采用优先级机制,可以确保高优先级消息迅速获得总线访问权限,从而实现更快的响应时间。这种优先级机制使得时间关键的任务,如发动机控制、刹车系统响应,能够在规定的时间内完成数据交换。
### 容错性
CAN总线在设计时就考虑到了容错性。它利用差分信号传输技术,增加了通信的可靠性。在任何节点检测到通信错误时,总线会自动执行错误处理流程,不影响整个网络的运行。
### 案例分析:实时通信在故障诊断中的应用
在汽车故障诊断系统中,实时通信是一个非常关键的应用场景。以一个实际案例来说明:当车辆的ABS(防抱死制动系统)检测到传感器故障时,系统会立即通过CAN总线发送故障信号。相关控制单元,如制动控制模块和车身控制模块,会接收到这个信号,并根据预定的故障处理策略做出反应。这个过程需要在极短的时间内完成,以确保车辆的安全。CAN总线的实时性使得整个系统能即时响应故障信号,从而有效地进行故障诊断和处理。
下面是一段用于故障诊断的CAN总线通信示例代码:
```c
// CAN消息发送函数
void CAN_SendDiagnosisMessage(uint16_t messageID, uint8_t *data, uint8_t dataLength) {
CAN_Message msg;
msg.id = messageID;
msg.length = dataLength;
memcpy(msg.data, data, dataLength);
CAN_Transmit(&msg); // CAN发送函数
}
// CAN消息接收处理函数
void CAN_ReceiveMessage() {
CAN_Message msg;
CAN_Receive(&msg); // CAN接收函数
if (msg.id == DIAGNOSIS_MESSAGE_ID) {
// 处理故障诊断消息
HandleDiagnosisMessage(msg.data, msg.length);
}
}
// 故障处理函数
void HandleDiagnosisMessage(uint8_t *data, uint8_t length) {
// 解析故障代码
uint16_t errorCode = (data[0] << 8) | data[1];
// 执行故障处理逻辑...
}
3.3 实时通信在故障诊断中的应用
故障诊断的重要性
故障诊断系统对于确保汽车电子系统的稳定性和安全性至关重要。它可以帮助维修技师快速定位问题,减少车辆停机时间,提高维修效率。CAN总线使得实时通信在故障诊断中得到广泛应用,特别是在现代汽车中,需要对大量的传感器和执行器进行监控。
实时故障诊断流程
实时故障诊断的过程包括信号采集、故障判断、信息存储和信息传输。CAN总线系统在信号采集和信息传输上发挥着至关重要的作用。当一个控制单元检测到异常信号时,它会将故障信息打包成CAN消息,并通过总线发送出去。其他的控制单元会接收这些信息,并结合自身数据进行进一步的分析,以确定故障的性质和严重程度。
实时通信优化策略
为了提高故障诊断的实时性和准确性,一些优化策略被实施:
- 使用高优先级的CAN消息ID来传输故障诊断信息,确保在总线繁忙的情况下,故障信息也能得到优先处理。
- 引入实时诊断协议(例如UDS - Unified Diagnostic Services),该协议定义了车辆内部诊断系统之间如何交换故障数据。
- 故障代码的标准化,这使得制造商和维修技师可以使用统一的故障代码表来识别和处理问题。
下面是一个故障诊断消息处理的流程图,使用了mermaid格式进行展示:
graph TD
A[开始] --> B[信号采集]
B --> C{异常检测}
C -->|是| D[生成故障消息]
C -->|否| B
D --> E[发送CAN故障消息]
E --> F[接收故障消息]
F --> G[解析故障代码]
G --> H[故障处理]
H --> I[信息存储]
I --> J[结束]
通过这个流程图,我们可以清晰地了解实时故障诊断的过程。CAN总线实时通信确保了故障信息的快速传递,使得整个故障诊断过程更为高效。
4. 故障诊断与能量管理优化策略
4.1 故障诊断系统的组成与工作原理
故障诊断系统是现代汽车电子系统中不可或缺的一部分,它能够在出现故障时提供实时反馈,帮助工程师快速定位问题,减少车辆停机时间,提高安全性。故障诊断系统通常由以下几个关键部分组成:
- 传感器单元 :负责收集车辆运行时的各类数据,如温度、压力、速度等,为故障诊断提供必要的原始数据。
- 控制单元(ECU) :接收传感器数据并进行处理,利用预设的算法和参数判断是否存在故障。
- 通信网络(如CAN总线) :作为ECU之间以及ECU与诊断设备之间的数据交换媒介。
- 诊断设备 :可以是一个手持设备或集成在车辆内的系统,用于读取故障代码,显示故障信息。
- 用户接口 :提供给驾驶员或维修人员的界面,如仪表盘上的警告灯、信息显示屏等。
在工作原理上,当传感器检测到异常数据,这些数据会被发送到控制单元。ECU将这些数据与内部的故障判断逻辑相比较,一旦检测到超出正常范围的参数,ECU会生成一个故障代码,并通过CAN总线发送至诊断设备。此时,驾驶员可能会看到一个警告信号,提示进行进一步的检查。维修人员将使用诊断设备读取故障代码,确定问题所在,并进行修复。
示例代码块与逻辑分析
下面是一个简化的例子,展示如何通过编程模拟一个故障诊断的逻辑过程:
// 假设有一个函数用来读取传感器数据
float readSensorData(int sensorId) {
// 返回传感器的读数
// 此处仅为示例,实际情况下应该返回真实传感器的读数
return 100.0;
}
// 一个判断是否存在故障的函数
bool checkForFault(float sensorData) {
if (sensorData < 50.0 || sensorData > 150.0) {
// 该条件假定传感器数据在50到150范围内为正常
// 如果读数超出此范围,则认为存在故障
return true;
}
return false;
}
// 主函数模拟故障诊断过程
int main() {
float sensorData = readSensorData(1); // 假设传感器ID为1
if (checkForFault(sensorData)) {
// 如果存在故障,则记录故障代码
// 假定代码为0x0123
recordFaultCode(0x0123);
// 可以在这里添加发送故障代码到诊断设备的逻辑
}
return 0;
}
// 一个记录故障代码的函数
void recordFaultCode(int code) {
// 这里可以将故障代码发送至CAN总线或者存储起来
// 该过程可能涉及到CAN总线的驱动程序调用和数据封装
// 这里仅为示例,不展示具体实现细节
}
在上述代码中, readSensorData 函数模拟从传感器读取数据的过程, checkForFault 函数判断传感器数据是否正常。若数据超出预设范围,则通过 recordFaultCode 函数记录故障代码,该函数的实现在真实环境中可能还会涉及到发送故障代码到CAN总线或进行日志记录等操作。
参数说明
-
sensorId:传感器ID,用于指定要读取数据的传感器。 -
sensorData:传感器数据,表示传感器读数的数值。 -
code:故障代码,用于标识具体的故障类型。
4.2 故障代码管理的重要性与实践
故障代码管理是故障诊断系统中关键的环节之一。有效的故障代码管理不仅能帮助工程师快速定位问题,还能辅助进行故障预测和车辆维护,延长车辆使用寿命。故障代码通常由制造商预先定义,包含具体的故障信息和可能的维修建议。
表格展示故障代码示例
下面是一个简化的故障代码表的示例,实际情况下,这些代码会更加详细且复杂:
| 代码编号 | 说明 | 潜在原因 | 行动建议 | |----------|------|----------|-----------| | 0x0123 | 发动机功率下降 | 燃油泵故障 | 检查燃油泵和相关电路 | | 0x0234 | 刹车系统失效 | 刹车传感器损坏 | 更换传感器并检查刹车系统 | | 0x0345 | 空调不制冷 | 制冷剂不足 | 补充制冷剂或检查泄漏点 |
在实践中,故障代码管理通常需要一个数据库来存储和管理故障代码信息,以便于工程师能够快速查询和分析。此外,车辆的ECU也会实时更新故障代码,并在某些情况下,比如故障持续存在或变得更加严重时,会通过CAN总线发送到诊断设备。通过管理故障代码,技术人员可以了解车辆的维护历史、频发故障和潜在问题,对车辆进行全面的健康评估。
4.3 能量管理的策略与CAN总线的作用
随着电子控制单元(ECU)数量的增加,对车辆各部件的能量分配和管理变得越来越复杂。CAN总线在能量管理系统中扮演了关键角色,它不仅传输数据,还能够在不同的ECU之间协调能量的使用,优化系统性能。
CAN总线在能量管理中的应用
能量管理策略通常包括:
- 电池能量监控 :通过CAN总线监控电池充放电状态,预测剩余续航能力,为驾驶员提供及时的充电建议。
- 优化发动机运转效率 :根据实时数据,调整燃油喷射和点火时机,保证发动机高效运转。
- 电动车辆的能量回收 :在制动时,通过CAN总线控制电动机工作模式,将动能转换为电能回充至电池中。
为了实现这些策略,各ECU之间需要实时、准确地交换数据,例如电池状态、环境温度、车辆负载等。通过CAN总线的实时数据交换和高效的消息处理能力,能量管理系统可以迅速作出响应,提高能效和延长车辆续航里程。
代码块与逻辑分析
以下是一个示例代码块,描述了如何根据电池状态和环境温度来调整发动机的工作参数:
// 假设的函数用来获取电池状态和环境温度
BatteryStatus getBatteryStatus() {
// 返回电池的状态信息
// ...
}
TemperatureReading getAmbientTemperature() {
// 返回环境温度的读数
// ...
}
// 主函数中根据获取的数据调整发动机参数
int main() {
BatteryStatus status = getBatteryStatus();
TemperatureReading temp = getAmbientTemperature();
if (status.chargeLevel < 30 && temp.value < 0) {
// 如果电池电量低于30%,并且环境温度低于0度
// 需要调整发动机参数,例如降低输出功率,以节省能量
adjustEngineParameters(lowPowerMode);
} else if (status.chargeLevel > 70 && temp.value > 25) {
// 如果电池电量高于70%,并且环境温度高于25度
// 可以利用多余的电量提高输出功率,提升车辆性能
adjustEngineParameters(highPerformanceMode);
}
return 0;
}
// 调整发动机参数的函数
void adjustEngineParameters(EngineMode mode) {
// 实现与CAN总线通信的逻辑,发送调整发动机参数的指令
// ...
}
在上述代码中, getBatteryStatus 函数和 getAmbientTemperature 函数分别用于获取电池状态和环境温度的读数。根据这些数据, main 函数判断车辆当前的工作模式,并调用 adjustEngineParameters 函数来发送适当的消息到CAN总线,以调整发动机的运行参数。
通过这种方式,CAN总线不仅确保了数据的实时交换,还使得能量管理系统能够根据车辆当前的运行条件,做出最合适的工作参数调整,优化整体性能。这展示了CAN总线在现代汽车能量管理中不可或缺的作用。
5. 安全性、系统扩展性与布线简化
5.1 安全控制策略的设计与实施
在当今的汽车电子领域,安全性是设计的首要考虑因素之一。特别是在使用了高度集成的CAN总线系统后,安全控制策略的设计与实施变得尤为重要。安全控制策略需要确保在极端情况下系统能够做出正确响应,防止故障和潜在的危险。
设计安全控制策略首先要进行危害分析和风险评估,明确哪些部件或者系统可能会对安全构成威胁。基于这些分析,系统工程师需要设计出一套完善的监控机制,这些机制能够实时检测系统运行状态,并在检测到异常时,快速准确地执行安全措施。比如,安全相关的控制单元可能会启动紧急制动程序或者对车辆的其他电子控制单元(ECU)发出安全警告。
在实施过程中,需要对CAN总线上的安全关键信息进行加密和优先级处理,以确保这些信息能够被安全控制器及时接收并作出反应。此外,还需要实施故障安全(Fail-Safe)或故障安全关闭(Fail-Safe Shutdown)策略,保证在任何单点故障情况下,系统能够安全地将车辆带入停车状态。
5.2 CAN总线系统的扩展性与升级路径
CAN总线系统的扩展性是指系统能够容纳更多的节点,同时保持数据通信的可靠性。这一特性对于汽车制造厂来说至关重要,因为车辆设计的迭代更新需要增加更多功能,这通常意味着更多的电子控制单元需要加入到CAN总线网络中。
为了实现系统的扩展性,设计人员在最初设计CAN总线系统时就要考虑物理布线、带宽分配以及节点的可识别性。例如,通过使用CAN FD(Flexible Data-rate)技术,可以提升数据传输速率,并为未来的技术升级预留空间。同时,使用模块化设计可以确保在不改动整体架构的情况下,增加新的功能模块。
升级路径的规划同样重要。它通常包括软件和硬件的兼容性评估,确保新加入的ECUs能够与旧有的系统兼容,并且能够无缝地升级软件功能。同时,车辆制造商需要制定一套有效的ECU固件和控制软件更新策略,如通过OTA(Over-The-Air)技术实现远程更新。
5.3 电缆布线简化与系统重量降低的策略
随着电子功能的不断增多,车辆内部的线缆数量也在急剧增加,这不仅增加了成本,还提升了车辆重量。因此,布线简化和减轻系统重量成为了制造商追求的目标。
实现布线简化的一个有效策略是引入区域网络架构,如将多个ECU按照功能相近原则分为几个区域网络,然后通过网关连接到主CAN总线上。这样可以显著减少跨区域的线缆数量,同时降低信号传输的干扰。
系统重量的降低主要依赖于使用轻质材料和减少不必要的线路。例如,制造商可以使用轻质的复合材料来替代传统的铜线,并采用双绞线或同轴电缆替代传统的多芯电缆。同时,为了进一步减少线束重量,可以使用CAN总线技术的低压差分信号传输方式,减少线束的直径和重量。
5.4 技术文件《2007ZDH2007LW***.pdf》的深入分析与未来展望
最后,对于汽车制造商和工程师来说,技术文件的深入分析是确保设计符合最新安全和性能标准的关键。技术文件《2007ZDH2007LW***.pdf》可能包含有关车辆CAN总线网络的详细设计说明、安全协议和升级指南等重要信息。
通过深入研究该技术文件,工程师可以了解CAN总线在车辆中的具体实现方式,比如如何定义报文标识符、如何设置数据帧格式、如何处理网络错误和数据故障。此外,该文件可能还涉及如何扩展网络、增加新节点,以及如何升级系统软件而不影响车辆的其他功能。
对于未来展望,技术文件的分析将指导工程师预测和适应未来技术的发展趋势,例如,随着自动驾驶技术的普及,车辆内的数据量将大幅增加,这就需要对现有的CAN总线系统进行升级,比如引入更高性能的CAN FD或者转向更先进的车辆通信标准,如以太网等。此外,随着车辆电气化程度的提高,对于电池管理系统和电力分配的精确控制将变得越来越重要,这也需要对现有的CAN总线网络进行优化和改造,以适应新的需求。
简介:CAN总线是一种关键的多主站串行通信协议,在燃料电池轿车动力系统中承担着数据交换、故障诊断、能量管理、安全控制、简化布线和提高系统扩展性的重要角色。本文档详细探讨了CAN总线在2007年燃料电池轿车中的具体应用案例,展示了它如何优化动力系统的性能和可靠性,对于理解CAN总线在实际动力系统中的应用具有重要参考价值。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









