







OTC焊接机器人*终加工对象就是工件与焊嘴之间的坐标的设定及使用。
1.焊接机器人的坐标系。机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。
1)基坐标系位于机器人基座。它是*便于机器人从一个位置移动到另一个位置标系。
2)工件坐标系与工件相关,通常是*适于对机器人进行编程的坐标系。
3)工具坐标系定义机器人到达预设目标时所使用工具的位置。
4)大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。它适用于微动控制、一般移动以及处理具有若干机器人或外轴移动机器人的工作站和工作单元。
5)用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。
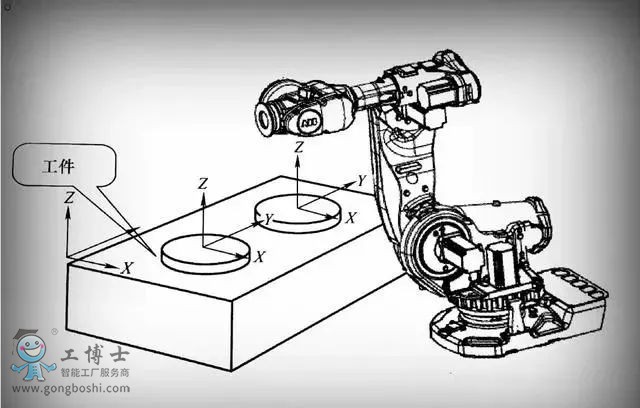
焊接机器人工作站中的工件
工件是拥有特定附加属性的坐标系,它主要用于简化编程(因置换特定任务和工件进程等而需要编辑程序时)。创建工件可用于简化对工件表面的微动控制。可以创建若干不同的工件,这样就必须选择一个用于微动控制的工件。使用夹具时,有效载荷是一个重要因素。为了尽可能**地定位和操纵工件,必须考虑工件重量。必须选择一个用于微动控制,如下图所示。
3.工件坐标系的定义
工件坐标系:它定义工件相对于大地坐标系(或其他坐标系)的位置,如下图所示。
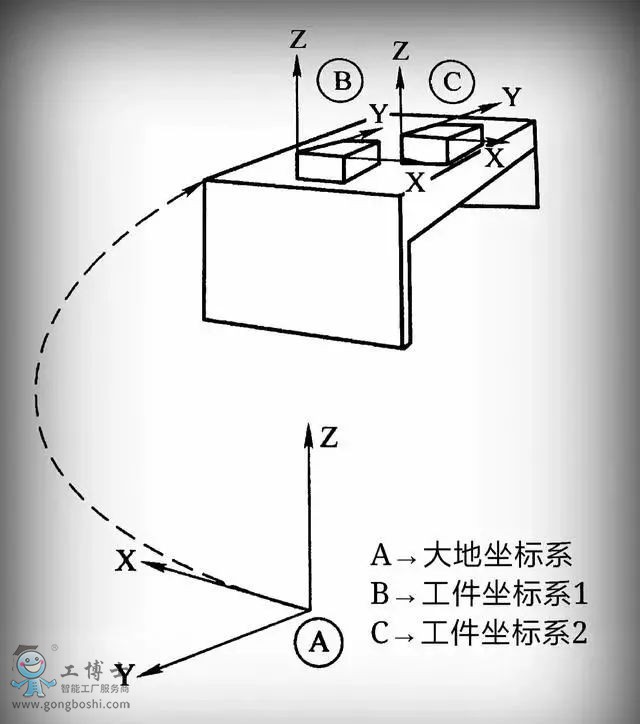
工件坐标系必须定义于两个框架:用户框架(与大地基座相关)和工
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2151
2151











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









