







 本文介绍了如何在PDPS 15.0.2版本中进行OTC焊接机器人的Home点示教、过度点示教,以及工作站的仿真运行。通过详细步骤展示了从设置Home点,添加过度点,到确保示教点的精确性、可行性和高效性,最后进行仿真运行与验证的完整过程。
本文介绍了如何在PDPS 15.0.2版本中进行OTC焊接机器人的Home点示教、过度点示教,以及工作站的仿真运行。通过详细步骤展示了从设置Home点,添加过度点,到确保示教点的精确性、可行性和高效性,最后进行仿真运行与验证的完整过程。
上一期为大家介绍了在Process Simulate虚拟仿真软件中机器人焊接操作工艺设置、焊接操作添加到路径编辑器、焊点姿态的调整;本期,再来为大家介绍一下机器人示教编程与工作站仿真运行。
使用软件版本:PD/PS 15.0.2
一、机器人Home点示教
机器人Home点是机器人运行的起点,通常情况下它也是机器人运行的终点。
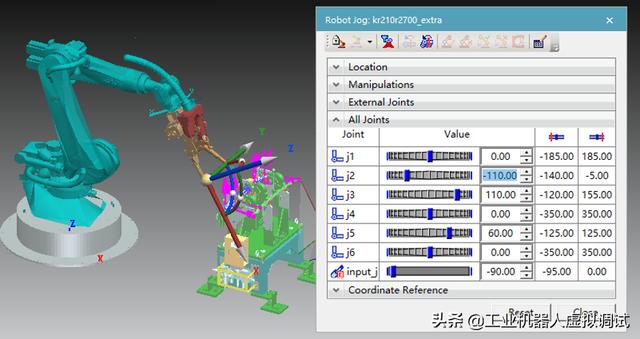
1.左侧对象树Object Tree窗口中,点选机器人kr210r2700_extra,然后在“Robot”菜单栏下,点击“Robot Jog”命令按钮,在打开的机器人手动运行面板中,移动机器人到合适位置。
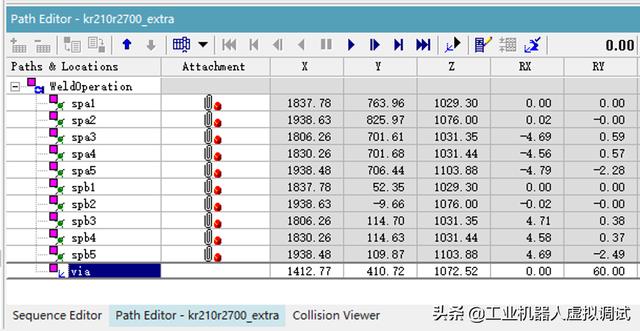
2.路径编辑器Path Editor窗口中点选机器人焊接操作WeldOperation,然后在“Operation”菜单栏下,点击“Add Current Location”命令按钮,添加机器人当前位置作为示教点。
3.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2307
2307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









