






本篇我们继续来学习西门子S7-200 SMART的PID回路控制,首先介绍一下如何配置PID向导。在工具菜单功能区单击PID按钮打开PID回路向导对话框,选择要组态的回路,最多可组态8个回路,这里我们选择回路0。
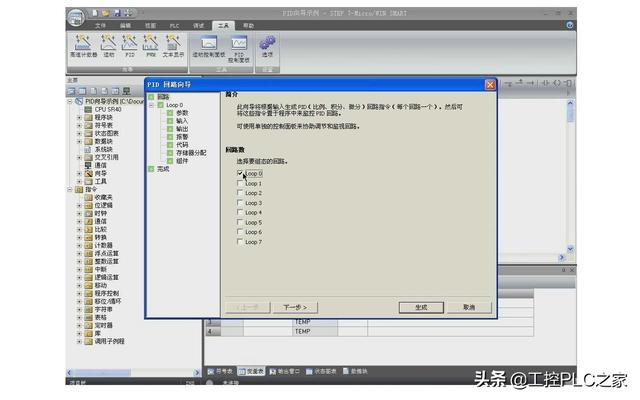
选择回路0
在左侧的树视图中单击回路0节点,在此定义回路名称。单击参数节点,在此设置回路参数,如果不需要比例作用,增益设置为0.0,如果不需要积分作用,积分时间设置为无穷大值INF,如果不需要微分作用,微分时间设置为0.0,采样时间是PID控制回路对反馈采样以及重新计算输出值的时间间隔,这里我们均采用默认值,后面在实验中进行自整定。
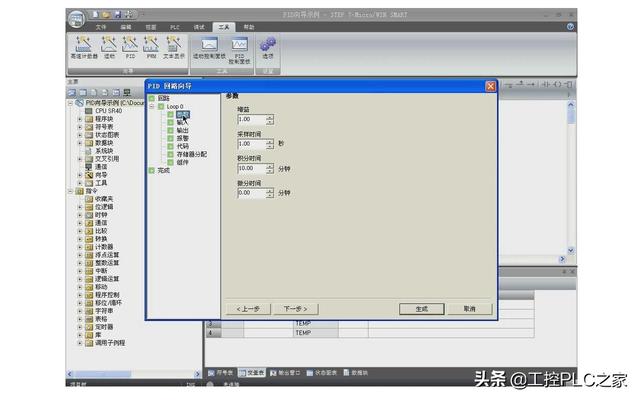
设置回路参数
单击输入节点,在此指定回路过程变量的标定方式,根据外接模拟量输入情况,类型选择単极型,标定选项中设置过程变量范围0到27648,对应回路设定值范围0.0到100.0,该值是给定值占过程变量量程的百分比,在本例中也可以认为是工程量温度值。
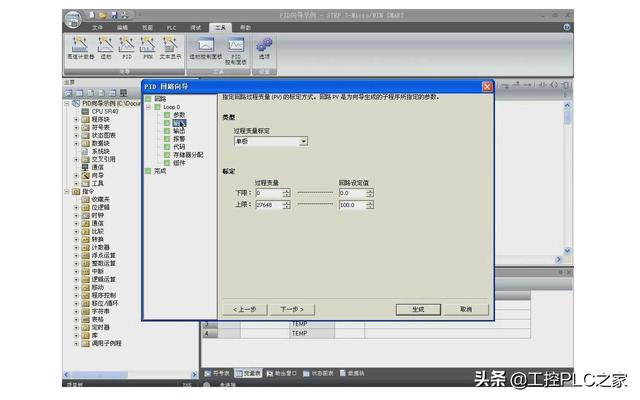
设置输入参数
点击输出节点,在此指定回路输出的标定方式,根据外接输出信号类型选择数字量,循环时间即PWM输出的周期,采用默认值0.1秒。
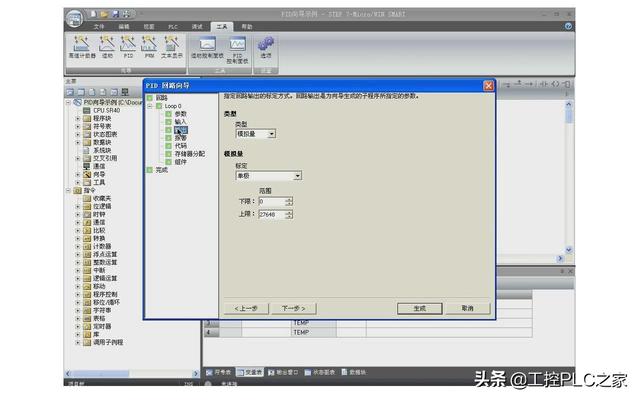
设置输出参数
单击报警节点,在此设定回路报警选项,启用下限报警、上限报警、模拟量输入错误报警,指定报警上下限值以百分比表示,以及模拟量输入模块连接到PLC的位置。
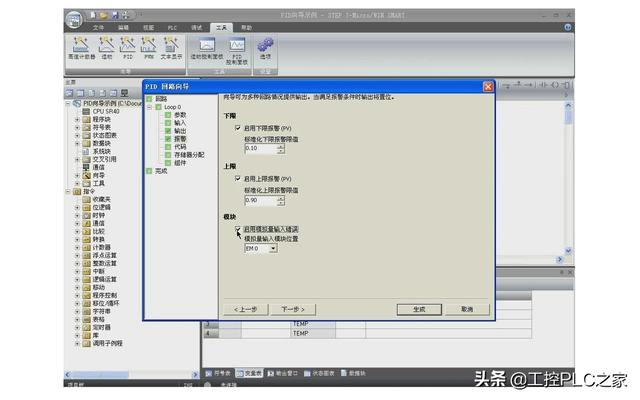
报警参数设置
单击代码节点,在此自定义向导生成的子程序和中断程序的名称,选择添加PID的手动控制,当处于手动模式时不执行PID计算,回路输出由程序控制。单击存储器分配节点,PID向导为完成PID运算需要120个字节的位存储器,为其指定起始地址,要保证程序中没有使用这些存储器,单击建议按钮向导将自动设定当前程序中未用的位存储器,这里我们采用VB0为起始地址。
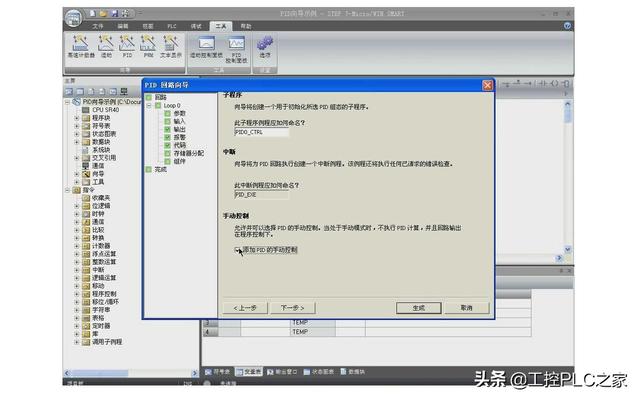
添加PID手动控制
单击组件节点,在此列出了PID向导生成的组件,包括一个初始化PID的子程序、一个用于循环执行PID功能的中断程序、一个120个字节的数据页以及一个符号表,单击生成按钮完成PID向导配置,向导生成的项目组件添加到了项目中。

项目组件列表
查看向导生成的项目组件。在项目树中展开程序块下的向导文件夹,双击初始化PID子程序打开,该子程序是加密的,可以查看相关的子程序调用说明,变量表列出了子程序的接口参数定义,编程调用时可参考。双击PID功能中断子程序打开,该中断子程序也是加密的,请注意PID向导使用了定时中断0,编程时不能再使用此中断,否则会引起PID运行错误。
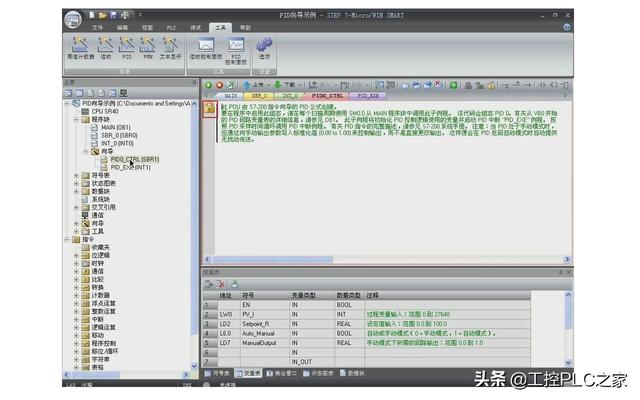
查看项目组件
展开符号表下的向导文件夹,双击PID符号表打开,在此可以查看PID回路相关参数的符号及地址信息,不可更改,编程时可参考。展开数据块下的向导文件夹,双击PID数据页打开,该数据页是加密的,在此可以查看PID回路的PID算法相关参数,这样PID向导就配置完成了。
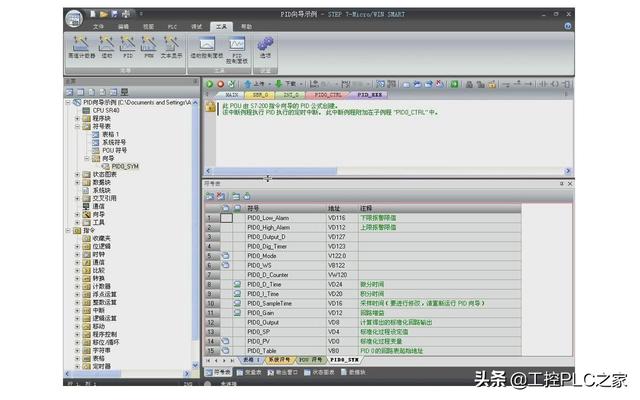
PID符号表
本篇文章中我们学习了西门子S7-200 SMART PID回路控制,配置PID向导、查看项目组件,在下篇文章中我们将继续学习西门子S7-200 SMART PID回路控制的其他内容,欢迎大家持续关注!

















 1933
1933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









