







目录
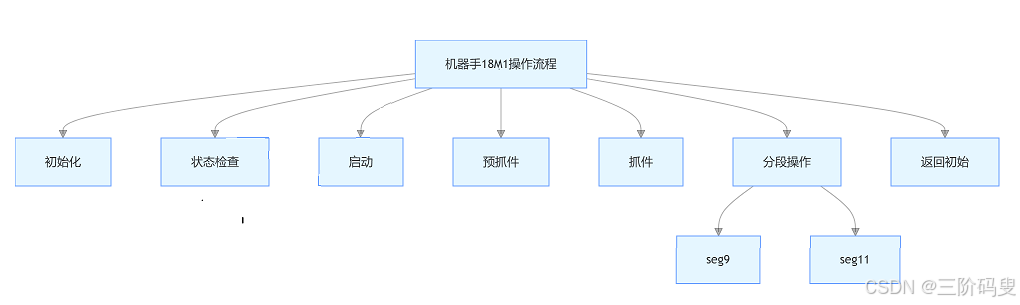
通过西门子 TIA Portal 软件对名为XXM1 的抓手机器人顺控器进行了完整的流程配置与测试。以下是关键操作步骤的整理与说明:
核心顺控流程
-
初始化阶段
- 步骤 2:标注 xx
m1 init,初始化顺控器逻辑,包括参数复位或初始状态设置。 - 步骤 3:标注 xx
m1 check state,检查初始化后的状态是否正常,确保无错误。
- 步骤 2:标注 xx
-
启动与预抓件
- 步骤 5:标注 xx
m1 start,触发顺控器启动,开始循环流程。 - 步骤 6:标注 xx
m1 pre pick,进入预抓件阶段,涉及机械臂移动至指定位置。
- 步骤 5:标注 xx
-
抓件与分段操作
- 步骤 7:标注 xx
m1 pick,执行实际抓件动作,确认机械臂正确抓取工件。 - 步骤 8:标注 xxm
1 seg 9,进入顺控器第 9 分段,放件前的准备。 - 步骤 10:标注 xx
m1 seg 11,进入第 11 分段,放件后离开动作。
- 步骤 7:标注 xx
-
循环结束与复位
- 步骤 11:标注 xx
m1 ret,触发循环结束并返回初始状态,完成一次完整流程。
- 步骤 11:标注 xx
关键细节
- 顺控器结构:通过屏幕截图描述,顺控器包含互锁、事件、动作等逻辑,涉及多个步骤(如
S_初始化、S_等待车型、S_抓件等)。 - 背景数据块:关联
DB2182数据块,存储抓手机器人顺控器的参数与状态。
潜在问题与建议
- 分段逻辑验证:建议检查顺控器分段(如第 9、11 段)的触发条件与动作是否与设计一致。
- 界面布局优化:若频繁调整选项卡,可考虑自定义 TIA Portal 界面以提高操作效率。
总结
通过逐步操作完成抓手机器人 XXM1 的顺控器流程,覆盖初始化、状态检查、抓件、放件及循环复位全周期。具体的过渡逻辑及机械臂运动轨迹是否精准,需结合工作现场的实际情况了解。
附录1:思维导图
附录2:鼠标点击grpah步骤流程
| 步骤 | 操作内容 | 关键注释 | 相关数据块 / 界面元素 |
|---|---|---|---|
| 1 | 鼠标拖动结束(Admin 窗格) | - | Siemens.Automation.Portal |
| 2 | 添加注释 | XXm1 init | DB2182(背景数据块) |
| 3 | 添加注释 | XXm1 check state | 顺控器步骤(S7-S_等待车型) |
| 4 | 鼠标拖动结束(选项卡) | - | TaskCardContainerFrame |
| 5 | 添加注释 | XXm1 start | 顺控器步骤(S_S818M1 启动) |
| 6 | 添加注释 | XXm1 pre pick | 预抓件指令(T3-T_允许预抓件 x) |
| 7 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











