







 本文详细介绍了如何使用C++对大族机器人Elfin05的正逆运动学进行编程,包括关节坐标系确定、DH参数表应用,以及逆运动学求解的步骤和多解生成方法。通过实例展示了杆件参数和DH参数的运用,以及如何通过Matlab和C++代码实现机器人运动学计算。
本文详细介绍了如何使用C++对大族机器人Elfin05的正逆运动学进行编程,包括关节坐标系确定、DH参数表应用,以及逆运动学求解的步骤和多解生成方法。通过实例展示了杆件参数和DH参数的运用,以及如何通过Matlab和C++代码实现机器人运动学计算。
简介
本文主要是对传统六自由度机器人进行正逆运动学求解,选取大族机器人Elfin05 为分析的对象,开发语言是C++。(完善中)
机器人正运动学
机器人正运动学推导过程
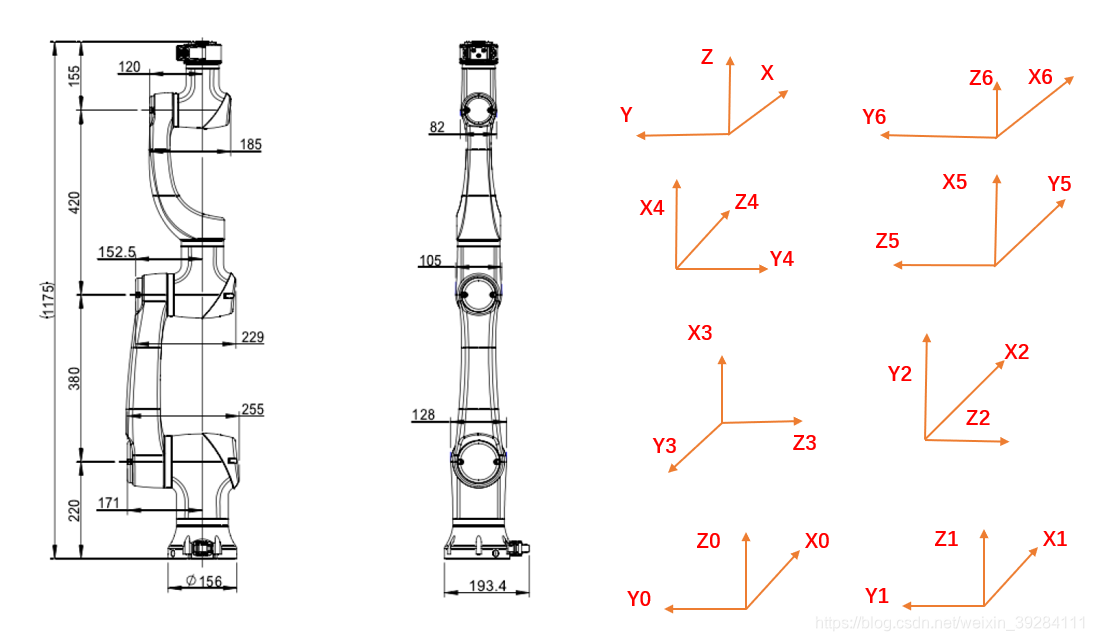
各关节坐标系确定的通用方法:
- 坐标系的Z轴,与各关节的旋转中心轴线重合
- 坐标系的X轴,与沿着相邻两个Z轴的公垂线重合
- 坐标系的Y轴,可以通过右手定则来确定
当相邻两个Z轴相交时,确定坐标系的方法如下:
- 坐标系的Y轴,沿着第一个Z轴与下一个X轴相交的延长线为Y轴
- 坐标系的X轴,可通过右手定则确定
当相邻两个Z轴平行时,确定坐标系的方法如下:
- 坐标系的X轴:沿着第一个Z轴与下一个X轴相交的延长线为Y轴
- 坐标系的X轴,可通过右手定则确定
那么:
杆1-杆2:杆长220mm,关节杆长0mm,绕z旋转0度,绕x旋转90度;
杆2-杆3:杆长0mm,关节杆长455mm,绕z旋转90度,绕x旋转0度;
杆3-杆4:杆长0mm,关节杆长0mm,绕z旋转0度,绕x旋转90度;
杆4-杆5:杆长495mm,关节杆长0mm,绕z旋转0度,绕x旋转90度;
杆5-杆6:杆长0mm,关节杆长0mm,绕z旋转90度,绕x旋转90度;
杆6-TCP:杆长-155mm,关节杆长0mm,绕z旋转0度,绕x旋转0度。
DH参数表
| i | alpha | a | d | theta | 工作范围 |
|---|---|---|---|---|---|
| 1 | 90° | 220mm | 0 | 0° | ±360° |
| 2 | 0° | 0 | 450mm | 90° | ±360° |
| 3 | 90° | 0 | 0 | 0° | ±360° |
| 4 | 90° | 495 | 0 | 0° | ±360° |
| 5 | 90° | 0 | 0 | 90° | ±360° |
| 6 | 90° | -155 | 0 | 0° | ±360° |
matlab代码块
% Link函数调用格式: L(i)=Link( [theta,D,A,alpha,sigma],‘convention’)
% 其参数与D-H参数相对应
% 前四个参数依次表示:参数‘theta’代表关节角,参数‘D’代表横距,
% 参数‘A’代表杆件长度,参数‘alpha’代表扭转角,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节,默认值为0。
% 参数 ‘convention’ 表示使用D-H参数法创建机器人模型的类型:
% ‘standard’表示采用标准D-H参数法创建机器人模型;‘modified’表示采用该改进D-H参数法创建机器人模型,默认值为'standard',代码中使用默认值。
clear;
clc;
%建立机器人模型
% theta d a alpha offset
L1=Link([0 0.220 0 pi/2 0 ],'standard'); %定义连杆的D-H参数
L2=Link([0 0 0.455 0 0 ],'standard');
L3=Link([0 0 0 pi/2 0 ],'standard');
L4=Link([0 0.495 0 pi/2 0 ],'standard');
L5=Link([0 0 0 pi/2 0 ],'standard');
L6=Link([0 -0.155 0 0 0 ],'standard');
L(1).qlim =[-2*pi, 2*pi];
L(2).qlim =[-2*pi, 2*pi];
L(3).qlim =[-2*pi, 2*pi];
L(4).qlim =[-2*pi, 2*pi];
L(5).qlim =[-2*pi, 2*pi];
L(6).qlim =[-2*pi, 2*pi];
robot=SerialLink([L1 L2 L3 L4 L5 L6],'name','manman'); %连接连杆,机器人取名manman
figure(1);
robot.display();
teach(robot);
逆运动学求解步骤
| Input: P=[x,y,z] E=[alpha,beta,gamma] // P表示机器人末端TCP的位置,E表示机器人末端TCP的姿态 Output:[q1,q2,q3,q4,q5,q6] //表示机器人的6个关节角的值 |
|---|
| 1.[n,s,a]←forward_euler(E)// 求解机器人末端TCP的旋转变换矩阵 |
| 2.Pw←E - d7a* // 求解机器人腕关节交点处wcp处的位置W |
| 3.[q1,q2,q3]←inverse_kinematic(Pw) // 解析法求解3个关节值,可求出4组解 |
| 4.R0_3←inverse_kinematic_0_3([q1,q2,q3]) // 推导正解计算基座相对于球形腕关节wcp处的变换矩阵R0_3 |
| 5.R3_6←R0_3_T[n,s,a] // 计算wcp相对于末端TCP的变换矩阵R3_6 |
| 6.[q4,q5,q6]←inverse_euler(R3_6) // 计算wcp后三个关节的值,由于3-5步骤可确定4个R0_3,而步骤6可以求出两组解,故共确定8组解。 |
| 7.generate_ik([q1,q2,q3,q4,q5,q6]) // 根据8组解寻找所有在关节角范围±2π的解并选取最近解。 |
c++代码
/**
* @description: 计算逆运动学,即计算不正确的角度,将有8个解决方案(但并非所有解决方案都有效)
* tcp.position tcp位置 ; tcp.orientation tcp方向....
* @param[in] tcp: 机器人位置+姿态[x,y,z,ox,oy,oz]
* @param[in] current: 机器人当前关节角
* @param[in & out] solutions:记录有效的解决方案
*/
void Kinematics::computeInverseKinematicsCandidates(const Pose& tcp, const JointAngles& current, std::vector<KinematicsSolutionType> &solutions)
{
// 1. 逐步计算Angle 0,在TCP 外计算Transformations Matrix T06,通过手腕长度->手腕中心点 沿着TCP方向转换TCP
// 通过手腕中心点到地面的投影的arctan计算angle 0 ,产生两个可能的解决方案,称为前向解决方案和后向解决方案
double sinx = sin(tcp.orientation[X]);
double cosx = cos(tcp.orientation[X]);
double siny = sin(tcp.orientation[Y]);
double cosy = cos(tcp.orientation[Y]);
double sinz = sin(tcp.orientation[Z]);
double cosz = cos(tcp.orientation[Z]);
// 设置转换矩阵 T06 ,左上3X3部分是zyx模型中是那个欧拉角中的旋转矩阵
// (实际上只需要第三列和第四列 除了计算所有内容以调试) x-y-z固定角 (http://www-home.htwg-konstanz.de/~bittel/ain_robo/Vorlesung/02_PositionUndOrientierung.pdf)
HomMatrix T06 ;
// 绕动轴X-Y-Z旋转(固定角)
T06 <<
cosz*cosy, cosz*siny*sinx-sinz*cosx, cosz*siny*cosx+sinz*sinx, tcp.position[0],
sinz*cosy, sinz*siny*sinx+cosz*cosx, sinz*siny*cosx-cosz*sinx, tcp.position[1],
-siny, cosy*sinx, cosy*cosx, tcp.position[2],
0, 0, 0, 1 ;
T06 *= view2Hand.inverse();
HomVector wcp_from_tcp_perspective = { 0,0, HandLength,1 }; // 第三个是末端到腕部的距离
HomVector wcp = T06 * wcp_from_tcp_perspective; // 腕部的位置
// 通过手腕位置计算在XOY平面下的投影--底角,我们有两种可能的解决方案,向前看和向后看;
// 根据tcp x 坐标的符号,我们将两个解决方案分配给向前和向后的角度
double angle0_solution1 = atan2( wcp[Y], wcp[X]);
double angle0_solution2 = atan2(-wcp[Y], -wcp[X]);
// singularity check: if we are right above the origin, keep angle0
// 奇异性检测: 如果我们在原点上方,则保持角度0
if ((fabs(wcp[Y]) < floatPrecision) && (fabs(wcp[X]) < floatPrecision)) {
angle0_solution1 = current[0];
angle0_solution2 = M_PI_set_2 - current[0];
}
// 初始化向前和向后的角度值
double angle0_forward = 0;
double angle0_backward = 0;
//判断 X 是否为非负值
bool tcpXPositive = tcp.position[X] >= 0;
if (tcpXPositive) {
angle0_forward = angle0_solution1;
angle0_backward = angle0_solution2;
} else {
angle0_forward = angle0_solution2;
angle0_backward = angle0_solution1;
}
// 2.计算anlge1和anlge2,使用joint1 , joint2 和joint3 的三角形
// 三角形的边 a= 前臂长,b=上臂长 ,c = 距离(wcp和base),用余弦定理计算角度
// 计算关节1和wcp的高度差
double z_distance_joint1_wcp = wcp[Z] - HipHeight; // TCP - 220
// 计算基座和wcp的俯视图的斜边长
double distance_base_wcp_from_top = hypothenuseLength(wcp[X],wcp[Y]); // 求解平方和
// 计算三角形的c边(门字形) z_distance_joint1_wcp 和 distance_base_wcp_from_top
double c = hypothenuseLength( z_distance_joint1_wcp , distance_base_wcp_from_top ); // 机器人J0-J1轴线相交点到机器人腕部的距离
double b = UpperArmLength; // 机器人J1-J2的轴线长
double a = TotalForearmLength; // 机器人J2-J3的轴线长
double alpha = triangleAlpha(a,b,c); // 计算TotalForearmLength对应的夹角
double gamma = triangleGamma(a,b,c); // 计算三角形的c边对应的夹角
// 翻转标志: 三角形是出于翻转位置还是非翻转位置
double flipFlag_forward = tcpXPositive ? 1.0 : -1.0;
double flipFlag_backward = tcpXPositive ? -1.0 : 1.0;
// 计算J2肘部在下和肘部在上的角度
double delta_forward = atan2(z_distance_joint1_wcp, flipFlag_forward * distance_base_wcp_from_top);
double delta_backward = atan2(z_distance_joint1_wcp, flipFlag_backward * distance_base_wcp_from_top);
// 计算angle1的4种可能 已知三边长c/b/a求角度
double angle1_forward_sol1 = - (M_PI_set_2 - ( delta_forward + alpha));
double angle1_forward_sol2 = - (M_PI_set_2 - ( delta_forward - alpha));
double angle1_backward_sol1 = - (M_PI_set_2 - ( delta_backward + alpha));
double angle1_backward_sol2 = - (M_PI_set_2 - ( delta_backward - alpha));
// 记录angle2两种可能
double angle2_sol1 = gamma - M_PI_set;
double angle2_sol2 = M_PI_set - gamma;
// 3.计算angle3 /angle4 /angle5
// 先计算旋转矩阵R03,再计算Inverse R03 (等于转置矩阵)
// 最后取出T06的R06,通过计算逆R03 × R06 得出 R36,通过求解R36 计算angle3-4-5
computeIKUpperAngles(tcp, current, PoseConfigurationType::PoseDirectionType::FRONT, PoseConfigurationType::PoseFlipType::NO_FLIP,
angle0_forward, angle1_forward_sol1, angle2_sol1, T06, solutions[0], solutions[1]);
computeIKUpperAngles(tcp, current, PoseConfigurationType::PoseDirectionType::FRONT, PoseConfigurationType::PoseFlipType::FLIP,
angle0_forward, angle1_forward_sol2, angle2_sol2, T06, solutions[2], solutions[3]);
computeIKUpperAngles(tcp, current, PoseConfigurationType::PoseDirectionType::BACK, PoseConfigurationType::PoseFlipType::NO_FLIP,
angle0_backward, angle1_backward_sol1, angle2_sol1, T06, solutions[4], solutions[5]);
computeIKUpperAngles(tcp, current, PoseConfigurationType::PoseDirectionType::BACK, PoseConfigurationType::PoseFlipType::FLIP,
angle0_backward, angle1_backward_sol2, angle2_sol2, T06, solutions[6], solutions[7]);
}
/**
* @description: 计算TCP的最后三个角度和前三个角度(2种解)
* @param[in] tcp:机器人位置+姿态
* @param[in] current:机器人当前关节角
* @param[in] poseDirection:肘部在上还是在下
* @param[in] poseFlip:翻转或非翻转
* @param[in] angle0:所计算的关节角J0
* @param[in] angle1:所计算的关节角J1
* @param[in] angle2:所计算的关节角J2
* @param[in] T06:转换矩阵T06
* @param[in & out] sol_up:解决方案(因存在两种解,分别存储)
* @param[in & out] sol_down:解决方案(因存在两种解,分别存储)
*/
void Kinematics::computeIKUpperAngles(
const Pose& tcp, const JointAngles& current,
PoseConfigurationType::PoseDirectionType poseDirection,
PoseConfigurationType::PoseFlipType poseFlip,
double angle0, double angle1, double angle2, const HomMatrix &T06,
KinematicsSolutionType &sol_up, KinematicsSolutionType &sol_down)
{
// UP
sol_up.config.poseFlip = poseFlip; // 翻转或非翻转,根据输入而定
sol_up.config.poseDirection = poseDirection; // 肘部在上或在下,根据输入而定
sol_up.config.poseTurn = PoseConfigurationType::UP; // 向上
sol_up.angles[0] = angle0;
sol_up.angles[1] = angle1;
sol_up.angles[2] = angle2;
// DOWN
sol_down.config.poseFlip = poseFlip; // 翻转或非翻转,根据输入而定
sol_down.config.poseDirection = poseDirection; // 肘部在上或在下,根据输入而定
sol_down.config.poseTurn = PoseConfigurationType::DOWN; // 向下
sol_down.angles[0] = angle0;
sol_down.angles[1] = angle1;
sol_down.angles[2] = angle2;
// 先计算旋转矩阵R03,再计算Inverse R03 (等于转置矩阵)
// 最后取出T06的R06,通过计算Inverse R03 × R06 得出 R36,通过求解R36 计算angle3-4-5
HomMatrix T01, T12, T23;
// 计算矩阵 T01-T12-T23
computeDHMatrix(HIP, angle0, T01);
computeDHMatrix(UPPERARM, (angle1 - radians(90.0)), T12);
computeDHMatrix(FOREARM, (angle2 - radians(90.0)), T23);
for (int i = 0; i < 3; ++i)
{
for (int j = 0; j < 3 ;++j)
{
if( fabs(T01(i,j)) > 0.0 && fabs(T01(i,j)) < (0.0 + floatPrecision) )
{ T01(i, j) = 0.0;}
if( fabs(T12(i,j)) > 0.0 && fabs(T12(i,j)) < (0.0 + floatPrecision) )
{ T12(i, j) = 0.0;}
if( fabs(T23(i,j)) > 0.0 && fabs(T23(i,j)) < (0.0 + floatPrecision) )
{ T23(i, j) = 0.0;}
}
}
// 根据矩阵T01-T12-T23 ,提取其姿态矩阵 R01-R12-R23
RotationMatrix R01 = T01.topLeftCorner(3,3);
RotationMatrix R12 = T12.topLeftCorner(3,3);
RotationMatrix R23 = T23.topLeftCorner(3,3);
// 求姿态矩阵 R02-R03
RotationMatrix R02 = R01*R12;
RotationMatrix R03 = R02*R23;
RotationMatrix R03_inv = R03;
// 通过手动转置来计算R03的逆 R03_inv = R03.inverse();
swap(R03_inv(0,1), R03_inv(1,0));
swap(R03_inv(0,2), R03_inv(2,0));
swap(R03_inv(1,2), R03_inv(2,1));
// 提取T06的姿态矩阵R06
RotationMatrix R06 = T06.topLeftCorner(3,3);
RotationMatrix R36 = R03_inv * R06;
// // 关节5
// sol_up.angles[4] = acos(R36(2,2));
// sol_down.angles[4] = -sol_up.angles[4];
// 所以一个非常危险的可能性是c4,s4,c5,s5,c6或s6中的任何一个都可能出现在分母中。
// 如果c5为零,将使方程退化。
if( R36(2,2) == 1 )
{
sol_up.angles[4] = atan2( sqrt(pow(R36(1,2),2) + pow(R36(0,2),2)) , R36(2,2));
sol_down.angles[4] = -sol_up.angles[4];
}
else if(R36(2,2) == 0 )
{
sol_up.angles[4] = atan2( sqrt(pow(R36(1,2),2) + pow(R36(0,2),2)) , -R36(2,2));
sol_down.angles[4] = -sol_up.angles[4];
}
else
{
sol_up.angles[4] = atan2( sqrt(pow(R36(1,2),2) + pow(R36(0,2),2)) , -R36(2,2));
sol_down.angles[4] = -sol_up.angles[4];
}
// 4.计算angle5 atan2值域[-180,180]
// 判断象限
double sin_angle4_1 = sin(sol_up.angles[4]);
double sin_angle4_2 = - sin_angle4_1;
double cos_angle4_1 = cos(sol_up.angles[4]);
// 5-6.计算angle4和angle6
// 如果angle5 手腕为0度,则有无数个解(奇异),这需要特殊处理,使角度保持在当前位置附近
if ( pow(sin_angle4_1 , 2) < floatPrecision)
{
// 保持angle4(弯头)稳定,仅移动其他角度 或 直接为零
sol_up.angles[3] = current[3] == 0 ? 0 : current[3];
sol_down.angles[3] = current[3] == 0 ? 0 : current[3];
// [-pi/2,+pi/2] 当angle5为0
double asinR36_10 ;
if( cos_angle4_1 > 0 ) // angle5 = 0
{
asinR36_10 = asin(R36(1, 0)); // [-pi/2,+pi/2]
sol_up.angles[5] = sol_up.angles[3] - asinR36_10;
sol_down.angles[5]= sol_down.angles[3] - asinR36_10;
}
else // angle5 = 180
{
asinR36_10 = asin( - R36(1, 0)); // [-pi/2,+pi/2]
sol_up.angles[5] = asinR36_10 - sol_up.angles[3];
sol_down.angles[5]= asinR36_10 - sol_down.angles[3];
}
// 通过将其置于-PI和PI区间来归一化角度
while ((abs( sol_up.angles[5] - current[5]) > abs( sol_up.angles[5] + M_PI_set - current[5]))
&& (sol_up.angles[5] + M_PI_set <= actuatorConfigType[5].maxAngle))
{
sol_up.angles[5] += M_PI_set;
sol_down.angles[5] += M_PI_set;
}
while ((abs( sol_up.angles[5] - current[5]) > abs( sol_up.angles[5] - M_PI_set - current[5]))
&& (sol_up.angles[5] - M_PI_set >= actuatorConfigType[5].minAngle))
{
sol_up.angles[5] -= M_PI_set;
sol_down.angles[5] -= M_PI_set;
}
}
else
{
// 在这里开始,sin_angle_4_x不接近 0 则
sol_up.angles[5] = atan2( - R36(2,1)/sin_angle4_1, R36(2,0)/sin_angle4_1);
sol_down.angles[5] = atan2( - R36(2,1)/sin_angle4_2, R36(2,0)/sin_angle4_2);
sol_up.angles[3] = atan2( R36(1,2)/sin_angle4_1, R36(0,2)/sin_angle4_1);
sol_down.angles[3] = atan2( R36(1,2)/sin_angle4_2, R36(0,2)/sin_angle4_2);
}
// 6轴串联关节机器人有三种奇点:腕部奇点,肩部奇点,肘部奇点。
// 1、腕部奇点发生在4轴和6轴重合(平行)时。
// 2、肩部奇点发生在腕部中心位于1轴旋转中心线时。
// 3、肘部奇点发生在腕部中心和2轴3轴一条线 。
// 解决办法:
// 1.在规划路径中尽可能的避免机器人经过奇异点。
// 2.结合机器人运动学,优化机器人反解算法,确保在奇异点附近伪逆解的稳定性 。
// 3.
}
}
求多解
/**
* @description: 根据所计算机械手逆解,生成更多的解
* @param joints[in]:各关节角度
* @param ik[in]:中间处理结果
* @param new_ik[out]:所有的解
*/
void Kinematics::generate_all_ik(const std::vector<std::vector<double>> &joints, std::vector<double> &ik, std::vector<std::vector<double>> &new_ik)
{
size_t i = ik.size();
if (i == joints.size())
{
new_ik.push_back(ik);
return;
}
//
for (auto &j : joints[i])
{
ik.push_back(j);
generate_all_ik(joints, ik, new_ik);
ik.pop_back();
}
}
/**
* @description: return all possible joint value in [min_position, max_position)
* @param[in] max_position: 最大关节角
* @param[in] min_position: 最小关节角
* @param[in] joint: 关节角
* @return[out] results :所有在关节角范围的可能存在的关节角数值
*/
std::vector<double> Kinematics::lim(const double &max_position,const double &min_position, double joint)
{
std::vector<double> results;
// 判断关节角越界问题,将越界的解 正负2 PI 缩回到关节角范围内
if (joint > max_position)
{
while (joint > max_position)
{
joint -= 2 * M_PI_set;
}
while (joint > min_position)
{
results.push_back(joint);
joint -= 2 * M_PI_set;
}
}
else if (joint < min_position)
{
while (joint < min_position)
{
joint += 2 * M_PI_set;
}
while (joint < max_position)
{
results.push_back(joint);
joint += 2 * M_PI_set;
}
}
else // 在关节角范围内
{
// 把原先的结果放进results
results.push_back(joint);
double joint_tmp = joint - 2 * M_PI_set;
while (joint_tmp > min_position)
{
results.push_back(joint_tmp);
joint_tmp -= 2 * M_PI_set;
}
joint_tmp = joint + 2 * M_PI_set;
while (joint_tmp < max_position)
{
results.push_back(joint_tmp);
joint_tmp += 2 * M_PI_set;
}
}
return results;
}
/**
* @description: return all possible joint value in [min_position, max_position) 根据关节角范围求更多的解 std::vector<KinematicsSolutionType>
* @param[in] Solution: 机械比逆接所得的8组解
* @param[out] MoreSolutions: 所有在关节角范围的可能存在的关节角数值
*/
void Kinematics::ToLimits(const std::vector<KinematicsSolutionType> &Solution, std::vector<KinematicsSolutionType> &MoreSolutions)
{
// 新的解
std::vector<std::vector<double>> new_ik;
for (size_t i = 0; i < Solution.size(); ++i)
{
auto &ik = Solution[i];
// 分配内存
std::vector<std::vector<double>> ik_joints( (NumberOfActuators-1) , std::vector<double>());
for (size_t j = 0; j < NumberOfActuators-1; ++j)
{
// 求解每个轴可用的关节角
auto joints = lim(actuatorConfigType[j].maxAngle,actuatorConfigType[j].minAngle, ik.angles[j]);
ik_joints[j] = joints;
}
// 中间结果
std::vector<double> ik_path;
// 输出
generate_all_ik(ik_joints, ik_path, new_ik);
}
for (size_t j = 0; j < new_ik.size(); ++j)
{
KinematicsSolutionType ik_new;
for (size_t k = 0; k < NumberOfActuators-1; ++k)
{
ik_new.angles[k] = new_ik[j][k];
}
MoreSolutions.push_back(ik_new);
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









