开运算是先进行腐蚀(Erosion),然后再进行膨胀(Dilation),主要用于去除图像中的小噪声。使用开运算可以去除较小的白色噪声点,同时保留大部分的前景物体。
import cv2 import numpy as np # 读取图像 img = cv2.imread('dige.png') if img is None: print("Error: Unable to read the image.") exit() # 创建卷积核 kernel = np.ones((5, 5), np.uint8) # 进行开运算 opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel) # 显示结果 cv2.imshow('Opening', opening) cv2.waitKey(0) cv2.destroyAllWindows()
import cv2 import numpy as np # 读取图像 img = cv2.imread('dige.png') if img is None: print("Error: Unable to read the image.") exit() # 创建卷积核 kernel = np.ones((5, 5), np.uint8) # 进行闭运算 closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel) # 显示结果 cv2.imshow('Closing', closing) cv2.waitKey(0) cv2.destroyAllWindows()
img = cv2.imread('dige.png') if img is None: print("Error: Unable to read the image.") exit()
使用 cv2.morphologyEx 函数进行开运算。cv2.MORPH_OPEN 表示开运算。
:
closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)
使用 cv2.morphologyEx 函数进行闭运算。cv2.MORPH_CLOSE 表示闭运算。
:
使用 OpenCV 的 imshow 函数显示操作结果,并等待用户按下键盘任意键后关闭所有窗口:
cv2.imshow('Opening', opening) cv2.waitKey(0) cv2.destroyAllWindows()
cv2.imshow('Closing', closing) cv2.waitKey(0) cv2.destroyAllWindows()
总结
通过以上代码,你可以看到开运算和闭运算在图像处理中的效果。开运算用于去除小的白色噪声点,闭运算用于填充前景物体中的小孔洞。
细说一下里面卷积核的计算:
好的,让我们更详细地探讨卷积核在形态学操作中的作用和计算过程。
卷积核(Kernel)
卷积核是一个小矩阵,用于扫描图像并针对覆盖区域进行特定操作。常见的卷积核通常是方形的,例如 3x3、5x5,在你的代码中使用的是 5x5 的卷积核。
kernel = np.ones((5, 5), np.uint8)
这个卷积核是一个 5x5 大小的矩阵,所有元素都为1。其类型为无符号8位整数(np.uint8)。
形态学操作
形态学操作包括腐蚀(Erosion)和膨胀(Dilation),以及由这两个基本操作组合而成的开运算(Opening)和闭运算(Closing)。这两种操作的计算过程如下:
腐蚀(Erosion)
腐蚀操作的目的是缩小前景对象。具体过程如下:
- 卷积核移动:将卷积核放在图像上的某个位置。
- 最小值替换:计算卷积核覆盖区域内所有像素的最小值,并将该最小值替换中心像素值。
例如,假设图像是 8x8,卷积核是 3x3:
原图像: [[ 1, 2, 3, 4, 5, 6, 7, 8], [ 2, 3, 4, 5, 6, 7, 8, 9], [ 3, 4, 5, 6, 7, 8, 9, 10], [ 4, 5, 6, 7, 8, 9, 10, 11], [ 5, 6, 7, 8, 9, 10, 11, 12], [ 6, 7, 8, 9, 10, 11, 12, 13], [ 7, 8, 9, 10, 11, 12, 13, 14], [ 8, 9, 10, 11, 12, 13, 14, 15]] 3x3卷积核移动到某个位置,例如左上角: [[ 1, 2, 3], [ 2, 3, 4], [ 3, 4, 5]]
在这个位置,最小值是1,将这个值替换中心像素(即图像的(1,1)位置)。
膨胀(Dilation)
膨胀操作的目的是扩展前景对象。具体过程如下:
- 卷积核移动:将卷积核放在图像上的某个位置。
- 最大值替换:计算卷积核覆盖区域内所有像素的最大值,并将该最大值替换中心像素值。
例如,假设图像是 8x8,卷积核是 3x3:
原图像: [[ 1, 2, 3, 4, 5, 6, 7, 8], [ 2, 3, 4, 5, 6, 7, 8, 9], [ 3, 4, 5, 6, 7, 8, 9, 10], [ 4, 5, 6, 7, 8, 9, 10, 11], [ 5, 6, 7, 8, 9, 10, 11, 12], [ 6, 7, 8, 9, 10, 11, 12, 13], [ 7, 8, 9, 10, 11, 12, 13, 14], [ 8, 9, 10, 11, 12, 13, 14, 15]] 3x3卷积核移动到某个位置,例如左上角: [[ 1, 2, 3], [ 2, 3, 4], [ 3, 4, 5]]
在这个位置,最大值是5,将这个值替换中心像素(即图像的(1,1)位置)。
开运算(Opening)
开运算是先腐蚀后膨胀:
- 腐蚀:削减前景物体,去除小的白色噪声点。
- 膨胀:恢复腐蚀后的前景物体,使其保持原来的形状和大小。
闭运算(Closing)
闭运算是先膨胀后腐蚀:
- 膨胀:扩展前景物体,填充小孔洞。
- 腐蚀:恢复膨胀后的前景物体,使其保持原来的形状和大小。
示例代码
以下是使用卷积核进行开运算和闭运算的代码示例:
import cv2 import numpy as np # 读取图像 img = cv2.imread('dige.png') if img is None: print("Error: Unable to read the image.") exit() # 创建卷积核 kernel = np.ones((5, 5), np.uint8) # 进行开运算 opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel) cv2.imshow('Opening', opening) cv2.waitKey(0) cv2.destroyAllWindows() # 进行闭运算 closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel) cv2.imshow('Closing', closing) cv2.waitKey(0) cv2.destroyAllWindows()
通过这些操作,你可以去除图像中的噪声或填补图像中的孔洞,从而获得更干净的图像。希望这些解释能帮助你理解卷积核在形态学操作中的计算过程。如果你有更多问题或需要进一步的解释,请随时提问!
梯度=膨胀-腐蚀
pie = cv2.imread('pie.png')
kernel = np.ones((7,7),np.uint8)
dilate = cv2.dilate(pie,kernel,iterations = 5)
erosion = cv2.erode(pie,kernel,iterations = 5)
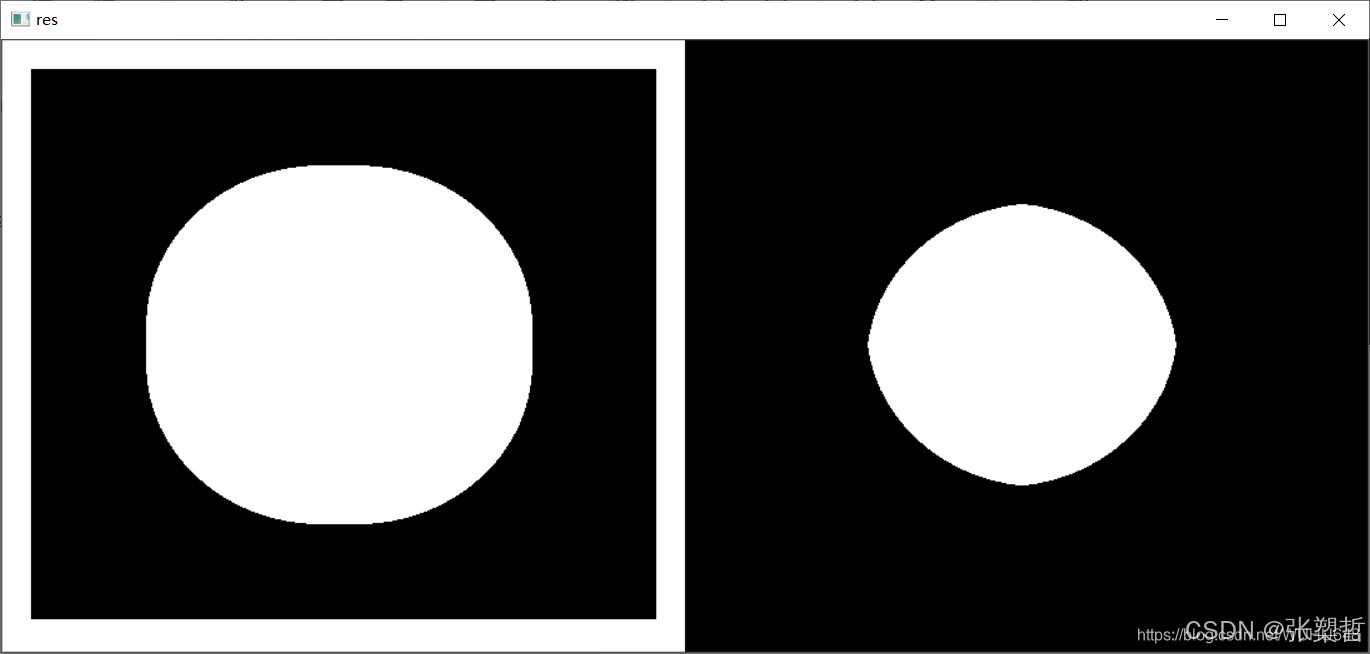
res = np.hstack((dilate,erosion))
cv2.imshow('res', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
你已经展示了如何进行膨胀和腐蚀操作,并将结果水平堆叠在一起显示。然而,如果你希望计算图像的梯度(即膨胀图像与腐蚀图像之间的差异),你需要执行一个减法操作。梯度可以突出显示图像的边缘。
这里是修改后的代码,它计算梯度并显示结果:
import cv2 import numpy as np # 读取图像 pie = cv2.imread('pie.png') if pie is None: print("Error: Unable to read the image.") exit() # 创建卷积核 kernel = np.ones((7, 7), np.uint8) # 进行膨胀操作 dilate = cv2.dilate(pie, kernel, iterations=5) # 进行腐蚀操作 erosion = cv2.erode(pie, kernel, iterations=5) # 计算梯度 gradient = cv2.subtract(dilate, erosion) # 显示膨胀、腐蚀和梯度图像 res = np.hstack((dilate, erosion, gradient)) cv2.imshow('Results: Dilate | Erode | Gradient', res) cv2.waitKey(0) cv2.destroyAllWindows()
解释
:
pie = cv2.imread('pie.png') if pie is None: print("Error: Unable to read the image.") exit()
:
kernel = np.ones((7, 7), np.uint8)
:
dilate = cv2.dilate(pie, kernel, iterations=5)
:
erosion = cv2.erode(pie, kernel, iterations=5)
:
gradient = cv2.subtract(dilate, erosion)
使用 cv2.subtract 函数计算膨胀图像和腐蚀图像之间的差异,得到梯度图像。
:
res = np.hstack((dilate, erosion, gradient)) cv2.imshow('Results: Dilate | Erode | Gradient', res) cv2.waitKey(0) cv2.destroyAllWindows()
将膨胀图像、腐蚀图像和梯度图像水平堆叠在一起,并显示结果。
这个代码会显示一个窗口,其中包含膨胀图像、腐蚀图像和梯度图像的对比。膨胀图像将对象的边缘扩展,而腐蚀图像将边缘收缩。梯度图像将显示对象边缘的差异,突出显示边缘信息。
希望这解释清楚了梯度的计算过程以及如何在图像中显示它!如果你有更多问题,请随时提问。
gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('gradient', gradient)
cv2.waitKey(0)
cv2.destroyAllWindows()
你提供的代码通过调用OpenCV的 cv2.morphologyEx 函数并使用 cv2.MORPH_GRADIENT 形态学操作符来计算图像的梯度。这种方法简化了之前手动计算梯度(膨胀减去腐蚀)的过程。下面是更详细的解释以及完整的代码范例:
代码说明
import cv2 import numpy as np # 读取图像 pie = cv2.imread('pie.png') if pie is None: print("Error: Unable to read the image.") exit() # 创建卷积核 kernel = np.ones((7, 7), np.uint8) # 计算梯度 gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel) # 显示梯度图像 cv2.imshow('Gradient', gradient) cv2.waitKey(0) cv2.destroyAllWindows()
详细解释
:
pie = cv2.imread('pie.png') if pie is None: print("Error: Unable to read the image.") exit()
读取名为 pie.png 的图像,并检查是否成功读取。如果失败,打印错误消息并退出程序。
:
kernel = np.ones((7, 7), np.uint8)
创建一个 7x7 大小的卷积核,所有元素均为1,类型为无符号8位整数。
:
gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)
使用 cv2.morphologyEx 函数计算形态学梯度,cv2.MORPH_GRADIENT 操作符会自动执行膨胀减去腐蚀的操作。这一步可以突出显示图像中的边缘。
:
cv2.imshow('Gradient', gradient) cv2.waitKey(0) cv2.destroyAllWindows()
使用OpenCV的 cv2.imshow 函数显示计算得到的梯度图像,并等待一个按键事件。按下任意键后,关闭所有OpenCV窗口。
总结
使用 cv2.morphologyEx 函数结合 cv2.MORPH_GRADIENT 形态学操作符,可以简化梯度计算过程,并直接获得包含边缘信息的梯度图像。这样不仅代码更简洁,而且效率更高。
希望这些解释能帮助你更好地理解这段代码。如果你有任何进一步的问题或需要更多相关信息,请随时提问!
这个梯度对杂质的处理是怎样的?
形态学梯度在处理图像中的杂质时具有一定的特点和局限性。为了理解梯度对杂质的处理效果,我们需要深入探讨形态学梯度的工作原理以及在不同情况下的表现。
形态学梯度的工作原理
形态学梯度是通过以下公式计算的:
[ \text{Gradient} = \text{Dilation} - \text{Erosion} ]
- 膨胀(Dilation):将图像中的每个像素替换为其邻域中的最大值。膨胀操作会使物体的边界向外扩展,填补小的孔洞,并连接断开的部分。
- 腐蚀(Erosion):将图像中的每个像素替换为其邻域中的最小值。腐蚀操作会使物体的边界向内收缩,去除小的噪声点和孤立像素。
通过计算膨胀和腐蚀的差值,形态学梯度可以有效地提取图像中的边缘。
杂质处理效果
:
- 腐蚀操作会去除图像中的小噪声点和孤立像素,但也会使边界收缩。
- 膨胀操作会填补小孔洞,连接断开的部分,但也会使边界扩展。
- 形态学梯度结合了这两者的操作,能够突出主要的边缘结构,但对于非常小的噪声点,可能仍然会保留一些。
:
- 较大的杂质在膨胀和腐蚀操作下可能会部分保留。这取决于杂质的大小和形状以及使用的卷积核大小。
- 使用较大的卷积核能够更有效地去除较大杂质,但同时也会影响到图像中的细节。
示例代码
以下示例代码展示了如何使用形态学梯度来处理图像中的边缘,并比较不同卷积核大小对杂质处理的效果:
import cv2 import numpy as np # 读取图像 img = cv2.imread('image_with_noise.png', cv2.IMREAD_GRAYSCALE) if img is None: print("Error: Unable to read the image.") exit() # 创建不同大小的卷积核 kernels = [np.ones((3, 3), np.uint8), np.ones((7, 7), np.uint8), np.ones((11, 11), np.uint8)] # 计算不同卷积核下的形态学梯度 gradients = [cv2.morphologyEx(img, cv2.MORPH_GRADIENT, kernel) for kernel in kernels] # 显示原始图像和不同卷积核下的梯度图像 cv2.imshow('Original Image', img) cv2.imshow('Gradient 3x3', gradients[0]) cv2.imshow('Gradient 7x7', gradients[1]) cv2.imshow('Gradient 11x11', gradients[2]) cv2.waitKey(0) cv2.destroyAllWindows()
解释
:
img = cv2.imread('image_with_noise.png', cv2.IMREAD_GRAYSCALE) if img is None: print("Error: Unable to read the image.") exit()
读取含有噪声的图像,并转换为灰度图。如果读取失败,打印错误消息并退出程序。
:
kernels = [np.ones((3, 3), np.uint8), np.ones((7, 7), np.uint8), np.ones((11, 11), np.uint8)]
创建不同大小的卷积核,分别为 3x3、7x7 和 11x11。
:
gradients = [cv2.morphologyEx(img, cv2.MORPH_GRADIENT, kernel) for kernel in kernels]
使用 cv2.morphologyEx 函数结合 cv2.MORPH_GRADIENT 操作符,计算不同卷积核大小下的形态学梯度。
:
cv2.imshow('Original Image', img) cv2.imshow('Gradient 3x3', gradients[0]) cv2.imshow('Gradient 7x7', gradients[1]) cv2.imshow('Gradient 11x11', gradients[2]) cv2.waitKey(0) cv2.destroyAllWindows()
使用 OpenCV 的 cv2.imshow 函数显示原始图像和不同卷积核大小下的梯度图像,并等待一个按键事件。按下任意键后,关闭所有OpenCV窗口。
总结
形态学梯度可以有效地提取图像中的边缘,并处理部分杂质。对于小的噪声点和孤立像素,梯度操作结合膨胀和腐蚀的效果,能够在一定程度上去除这些杂质。对于较大的杂质,选择合适大小的卷积核可以改善处理效果。
希望这些解释和示例代码能帮助你理解形态学梯度对杂质的处理。如果你有进一步的问题或需要更多相关信息,请随时提问!



























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











