





1.三种色彩空间
- 灰度色彩空间
- BGR,即蓝-绿-红色彩空间
- HSV,H(Hue)是色调,S(Saturation)是饱和度,V(Value)表示黑暗的程度
2.傅里叶变换
- 通过傅里叶变换来介绍图像的幅度谱(magnitude specturm),图像的幅度谱是另一种图像,幅度谱图像呈现了原始图像在变化方面的一种表示
- 傅里叶变换的概念是许多常见的图像处理操作的基础,比如边缘检测或线段和形状检测。
- 高通滤波器
- 高通滤波器(HPF)是检测图像的某个区域,然后根据像素与周围像素的亮度差值来提升该像素的亮度的滤波器。
以如下的核(kernel),即滤波器矩阵为例:
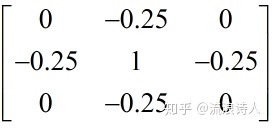
注:核是指一组权重的集合,它会应用在源图像的一个区域,并由此生成目标图像的一个像素。比如,大小为7的核意味着每49(7x7)个源图像的像素会产生目标图像的一个像素。
- 可把核看做一块覆盖在源图像上可移动的毛玻璃片,玻璃片覆盖区域的光线会按某种方式进行扩散混合后透过去。
- 计算完中央像素与周围邻近像素的亮度差值之和以后,如果亮度变化很大,中央像素的亮度会增加,反之则不会。换句话说,如果一个像素比它周围的像素更突出,就会提升它的亮度。
- 这在边缘检测上尤为有效,它采用一种称为高频提升滤波器(high boost filter)的高通滤波器。
- 高通和低通滤波器都有一个半径(radius)的属性,它决定了多大面积的临近像素参与滤波运算。
import cv2
import numpy as np
from scipy import ndimage
'''
1.傅里叶变换
'''
'''
(1)高通滤波器
'''
kernel_3x3 = np.array([[-1,-1,-1],[-1,8,-1],[-1,-1,-1]])
kernel_5x5 = np.array([[-1,-1,-1,-1,-1],
[-1,-1, 2, 1,-1],
[-1, 2, 4, 2,-2],
[-1, 1, 2, 2,-1],
[-1,-1,-1,-1,-1]])
#读取图像,指定格式为灰度图像
img = cv2.imread('./image/img6.jpg',cv2.IMREAD_GRAYSCALE)
#进行卷积运算
k3 = ndimage.convolve(img,kernel_3x3)
k5 = ndimage.convolve(img,kernel_5x5)
#模糊滤波
blurred = cv2.GaussianBlur(img,(11,11),0)
#作差
g_hpf = img - blurred
#显示图像
cv2.imshow('original',img)
cv2.imshow('3x3',k3)
cv2.imshow('5x5',k5)
cv2.imshow('g_hpf',g_hpf)
cv2.waitKey()
cv2.destroyAllWindows()最后又用一种不同的方法来实现高通滤波器:通过对图像应用低通滤波器之后,与原始图像计算差值。这样得到的效果会更好。
2 低通滤波器
- 高通滤波器是根据像素与邻近像素的亮度差值来提升该像素的亮度。低通滤波器(LPF)则是在像素与周围像素的亮度差值小于一定特征值,平滑该像素的亮度。它主要用于去噪和模糊化,比如说,高斯模糊是最常用的模糊滤波器(平滑滤波器)之一,它是削弱高频信号强度的低通滤波器。
3.边缘检测
def strokeEdges(src,blurKsize=7,edgeKsize=5):
'''
该函数实现性能更好的边缘检测
这里使用medianBlur()作为模糊函数,使用Laplacian()作为边缘检测函数。在使用medianBlur()之后,
需要将图像从BGR色彩空间转换为灰度色彩空间。在得到Laplacian()函数结果之后,需要将图像转换为
黑色边缘和白色背景(之前是白色边缘黑色背景)。然后将其归一化,并乘以源图像以便能将边缘变黑。
args:
src:源图像数据 BGR色彩空间
blurKsize:模糊滤波卷积核的宽和高 小于3,不进行模糊处理
edgeKsize:边缘检测卷积核的宽和高 return: dst:目标图像数据 灰度色彩空间
'''
if blurKsize >= 3:
#先模糊处理
blurredSrc = cv2.medianBlur(src,blurKsize)
cv2.imshow('blurredSrc',blurredSrc)
#BGR格式转化为灰度格式
graySrc = cv2.cvtColor(blurredSrc,cv2.COLOR_BGR2GRAY)
else:
graySrc = cv2.cvtColor(src,cv2.COLOR_BGR2GRAY)
cv2.imshow('graySrc',graySrc)
#边缘检测 对灰度图像检测效果更好
cv2.Laplacian(graySrc,cv2.CV_8U,graySrc,ksize = edgeKsize)
cv2.imshow('laplacian',graySrc)
#颜色反向处理 并归一化
normalizedInverseAlpha = (1.0/255)*(255 - graySrc)
cv2.imshow('normalizedInverseAlpha',normalizedInverseAlpha)
#通道分离 B,G,R 单通道图像
channels = cv2.split(src)
cv2.imshow('B',channels[0])
#计算后的结果分别与每个通道相乘
for channel in channels:
#这里是点乘,即对应元素相乘
channel[:] = channel * normalizedInverseAlpha
cv2.imshow('B1',channels[0])
#通道合并(只能合并多个单通道成为多通道)
return cv2.merge(channels)
img = cv2.imread('./image/img6.jpg',cv2.IMREAD_COLOR)
dst = strokeEdges(img)
cv2.imshow('dst',dst)
cv2.waitKey()
cv2.destroyAllWindows()
- Open CV提供了许多边缘检测滤波函数,包括以下:
- Laplacian() #作为边缘检测函数,他会产生明显的边缘线条,灰度图像更是如此。 Sobel()
- Scharr()
- 这些滤波函数都会将非边缘区域转换为黑色,边缘区域转换成白色或其他饱和的颜色。但是这些函数都容易将噪声错误的识别为边缘。缓解这个问题的方法就是在找到边缘之前对图像进行模糊处理,去除噪声。
- Open CV也提供了需要模糊滤波函数,包括以下:
- blur()
- medianBlur() #它对去除数字化的视频噪声特别有效,特别是去除彩色图像的噪声
- GaussianBlur()
- 边缘检测和模糊滤波的函数的参数有很多,但总会有一个ksize参数,它是一个奇数,表示滤波核的宽和高(以像素为单位)。
4.Canny边缘检测
Open CV还提供了一个非常方便的Canny()函数,该算法非常流行,不仅是因为它的效果,还因为在Open CV程序中实现时非常简单:
'''
Canny边缘检测
'''
can = cv2.Canny(img,200,300)
cv2.imshow('canny',can)
cv2.waitKey()
cv2.destroyAllWindows()- Canny边缘检测算法算法非常复杂,它有5个步骤,即使用高斯滤波器对图像进行去噪,计算梯度,在边缘上使用非最大抑制,在检测到的边缘上使用阈值去除假阳性,最后还会分析所有的边缘及其之间的连接,以保留真正的边缘并消除不明显的边缘。
cv2.Canny函数部分参数如下:
- 第一个参数是需要处理的原图像,该图像必须是单通道的灰度图;
- 第二个参数是阈值1。
- 第三个参数是阈值2.
其中较大的阈值2用于检测图像中明显的边缘,但是一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候较小的第一个阈值用于将这些断续的边缘连接起来。















 1290
1290











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









