





本文简单实现一个6自由度的工业机器人仿真控制器,用户可以通过界面上6个轴的滑条控制机器人的姿态。
1.Platform and robot model
Platform——vs2008,Qt4.8.6,Coin3D3.1.3
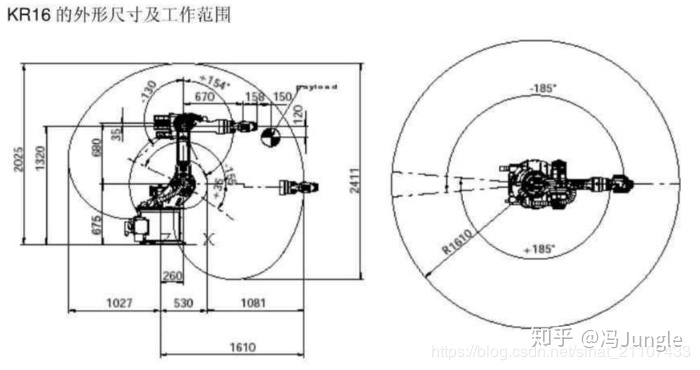
Robot model——KUKA KR16 robot,模型文件可以在官网上下载(https://www.kuka.com/)。
2.UI
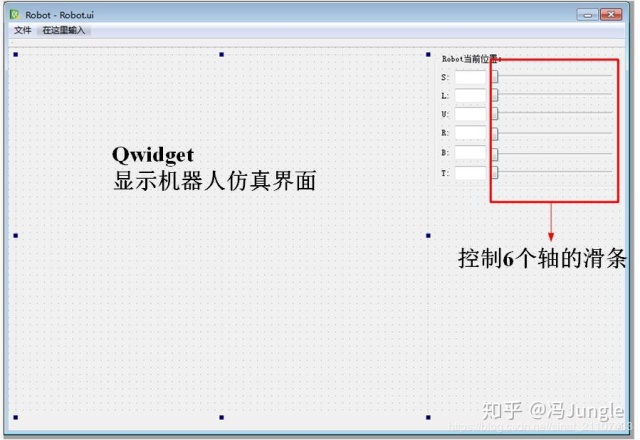
3.关于机器人
本文选择KUKA KR16机器人为例。查看该机器人的手册可知和示意图可得知机器人的各个杆长,各个轴的运动范围等参数。机器人的杆长等尺寸用于确定机器人的DH参数(与机器人运动学相关);各个轴的运动范围则需要在程序中给予限定。
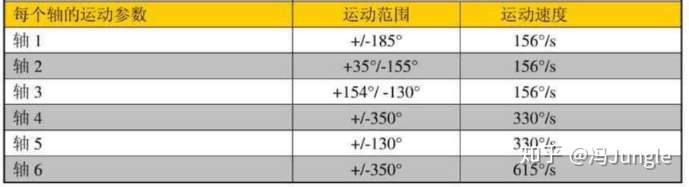
UI界面的滑条使用的是Qt提供的QSlider,因此各个QSlider的最大值最小值设置如下:
this->ui.horizontalSlider_Axis1->setRange(-185,185);
this->ui.horizontalSlider_Axis2->setRange(-35,155);
this->ui.horizontalSlider_Axis3->setRange(-130,154);
this->ui.horizontalSlider_Axis4->setRange(-350,350);
this->ui.horizontalSlider_Axis5->setRange(-130,130);
this->ui.horizontalSlider_Axis6->setRange(-350,350);4.关于实现
界面相关的实现过程如下:鼠标拖动任意一个轴的滑块滑动,对用的机器人轴转动到指定角度。这里采用的是QSlider的一个signal:valueChanged(int),每次拖动都会发射这个信号。
在对应的槽函数里主要实现:
(1)得到此时刻6个滑块的值,让机器人各个轴转动到各自对应的角度处;
(2)每个滑块左侧的文本框里实时显示角度数。
该部分代码如下:
void Robot::initUiRobotAxis()
{
this->ui.horizontalSlider_Axis1->setRange(-185,185);
this->ui.horizontalSlider_Axis2->setRange(-35,155);
this->ui.horizontalSlider_Axis3->setRange(-130,154);
this->ui.horizontalSlider_Axis4->setRange(-350,350);
this->ui.horizontalSlider_Axis5->setRange(-130,130);
this->ui.horizontalSlider_Axis6->setRange(-350,350);
connect(ui.horizontalSlider_Axis1,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
connect(ui.horizontalSlider_Axis2,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
connect(ui.horizontalSlider_Axis3,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
connect(ui.horizontalSlider_Axis4,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
connect(ui.horizontalSlider_Axis5,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
connect(ui.horizontalSlider_Axis6,SIGNAL(valueChanged(int)),this,SLOT(setRobotPose()));
}槽函数setRobotPose实现如下:
void Robot::setRobotPose()
{
double input_Joint[6] = {0,0,0,0,0,0};
input_Joint[0] = 0.01*ui.horizontalSlider_Axis1->value();
input_Joint[1] = 0.01*ui.horizontalSlider_Axis2->value();
input_Joint[2] = 0.01*ui.horizontalSlider_Axis3->value();
input_Joint[3] = 0.01*ui.horizontalSlider_Axis4->value();
input_Joint[4] = 0.01*ui.horizontalSlider_Axis5->value();
input_Joint[5] = 0.01*ui.horizontalSlider_Axis6->value();
ui.lineEdit_Axis1->setText(QString::number(input_Joint[0]));
ui.lineEdit_Axis2->setText(QString::number(input_Joint[1]));
ui.lineEdit_Axis3->setText(QString::number(input_Joint[2]));
ui.lineEdit_Axis4->setText(QString::number(input_Joint[3]));
ui.lineEdit_Axis5->setText(QString::number(input_Joint[4]));
ui.lineEdit_Axis6->setText(QString::number(input_Joint[5]));
this->setAxis(input_Joint);
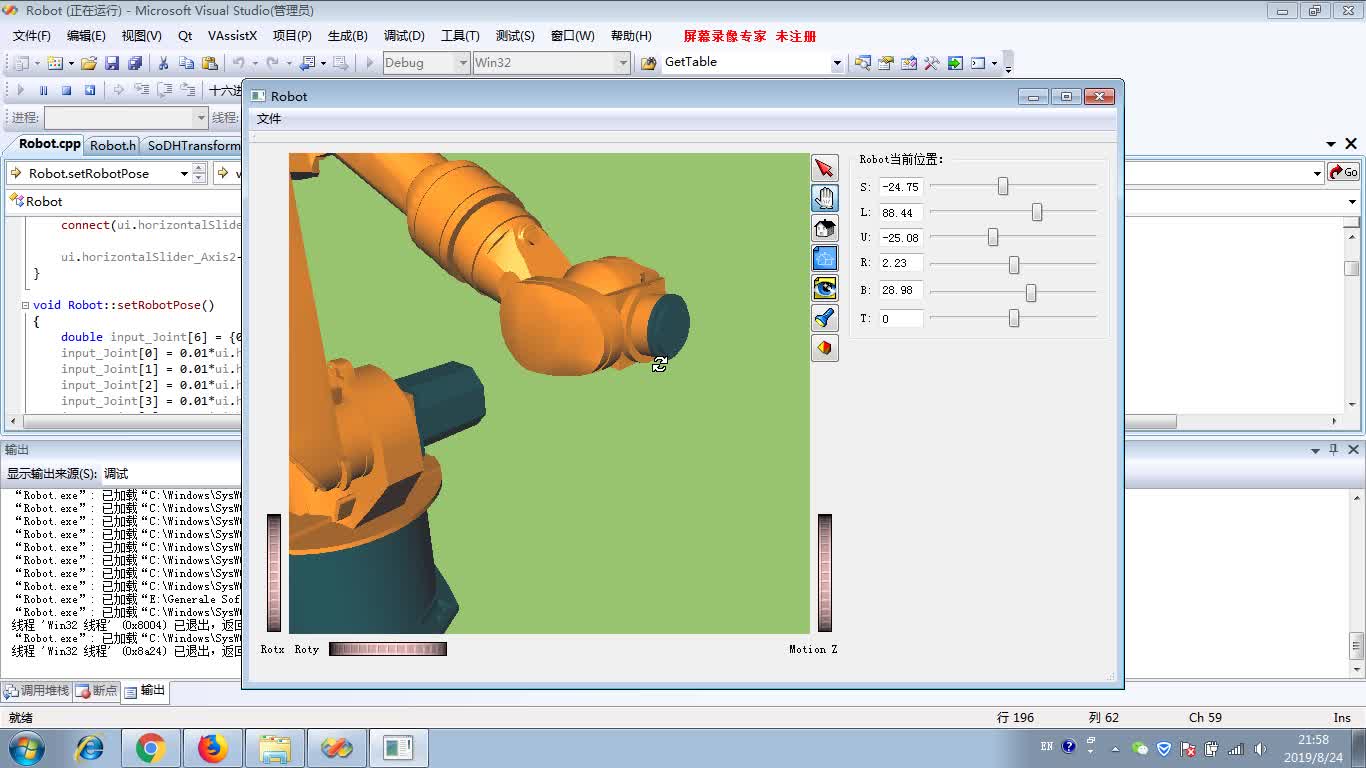
}5.效果















 7498
7498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









