






每次打开魔兽世界,进入游戏界面,我都有一种想关掉的感觉,杂乱的框体,复杂的界面,打开人物界面,一大堆数据和装备,甚至有时候忘记保存配装,想要重新找到配装,我都要大伤脑筋……
直到一天(昨天晚上),我发现了它,才开始觉得不过如此,今天发现,我已经爱上了它,太好用了!本来不想分享这种对魔兽主线毫无帮助的黑科技,不过我还是决定分享一下,因为我已经爱上他了!Narcissus……老规矩先进入插件介绍
本插件压缩包来源于大铁锤curseforge ,不放心的可以自己去大铁锤搜索Narcissus
插件介绍
插件名称:艾泽拉斯冒险套装-Narcissus
插件作者:man661118
创建时间:2019-1-18
适用范围:幻化、配装、摄影、展示、对比
推荐理由:让你在独立的人物界面静下心来进行配装和幻化……干净 漂亮,截图倍儿有面

使用指南
- 如何安装
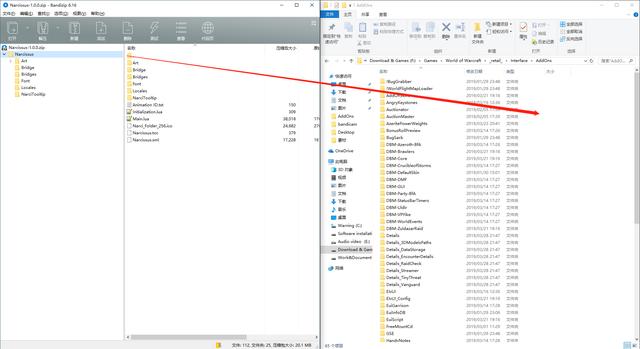
文字描述:下载插件压缩包,将压缩包里的Narcissus整体放入魔兽世界插件文件夹
(魔兽世界插件文件夹地址World of Warcraft_retail_InterfaceAddOns)
- 如何打开炫酷的人物界面
对话框输入/narci回车即可

- 配装操作
两种操作方式:
第一种是直接左键点击,固定弹出同类别装备科进行对比

第二种是按着alt键将鼠标移动至装备即可进行弹出,直到你鼠标移动到另一个装备槽上

第三种是鼠标移动至装备槽,按住alt就可弹出属性窗口,放开alt即可关闭属性窗口
- 属性配装
在界面右边就有你的人物属性栏

点击紫色宝石可以显示更为详细的属性栏
在装备槽固定状态,可以进行属性对比,以方便你快速找到需要的装备(像我这种常年遗忘装备的人,分解了不少泰坦装备)

- 截图操作
在界面左下角有一个相机,这就是截图和幻化以及快速动作的界面
先说后面三个按钮的作用
快捷表情:一键按出某个动作,方便截图
隐藏文字:就是隐藏所有战斗,对话文字
最佳画质:自动调节至最高画质
快捷表情还有一个不错的功能,就是

auto capture 自动拍照功能,就是你点击了动作后,它会自动给你截图,并将截图放入魔兽世界截图文件夹内,让我们来试试截图功能


- 幻化操作
幻化就比较简单,点击幻化按钮就会显示所有幻化装备

点击copy texts 就能复制幻化调料包,对于幻化党来说是一个不错的功能

怎么样?心动没有,如果心动了赶紧私信我“narci”来获取插件压缩包吧
如无意外,我会持续更新好玩好用刺激的魔兽黑科技,如果你跟我一样喜欢倒腾这些,请关注我吧!配合以下游戏界面食用更佳
魔兽暴力分享-最休闲最单机的游戏界面



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









