





核心概览
——《Fundamentals ofPower Electrics》译文系列(之)控制器设计
1 概述
2 负反馈对网络传递函数的影响
2.1 反馈环节的特点:减小“扰动-输出”传递函数
2.2 反馈环节的特点:降低“给定-输出”传递函数对前向通道增益变化的敏感性
3 重要参量1/(1+T)与T/(1+T)的释义
4 稳定性
4.1 相角裕度测试
4.2 相位裕度与闭环阻尼系数的关系
5 调节器设计
5.1 超前校正器(PD)
5.2 滞后校正器(PI)
5.3 超前-滞后(PID)校正器
5.4 设计举例
6 开环增益的测量
6.1 电压注入法
6.2 电流注入法
6.3 不稳定系统的测量
7 关键点总结
1 概述
▼
在所有的开关变换器中,输出电压v(t)是输入电压vg(t)、占空比d(t)和负载电流iload(t),以及变换器器件参数的函数。在dc-dc变换器的应用中,我们的目标是希望即使在有输入电压扰动、负载电流扰动或器件参数变化的情况下,也能得到一个恒定的输出电压v(t) = V。一种典型的情况如图1.1所示,在一个离网电源中,输入电压vg(t)中可能包含由整流产生的工频的二次谐波(100Hz或120Hz),其幅值也可能因为临近功率系统的通断而发生变化。另外,负载电流iload(t)可能也会有显著幅值变化,例如,当负载电流由满载切换到50%负载时,或由50%负载切换到满载时。但通常情况下,典型的供电规范要求在以上工况下输出电压必须保持在指定的范围内(例如:3.3V ± 0.05V)。另一方面,电路中的器件参数在生产时允许存在一定的工差,因此在变换器的大批量生产中,其输出电压的误差存在一定的分布范围。我们希望所有这些误差分布基本上都在指定的范围内,然而,如果不使用负反馈,这是不现实的。另外,对于逆变器,除了输出电压是交流量以外,以上类似的情况也同样适用。
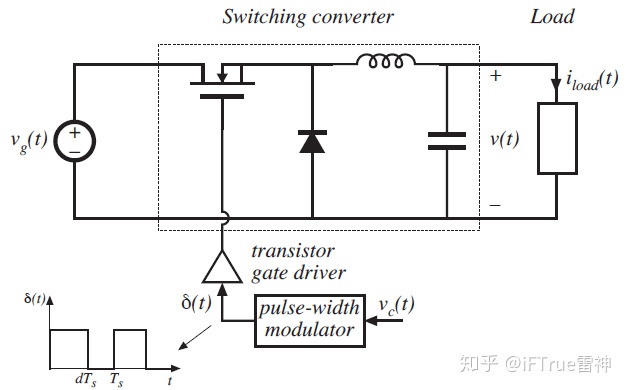
(a) 开环Buck变换器
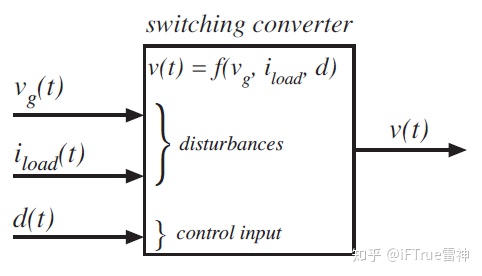
(b) 输出电压v与占空比d,输入电压vg和负载电流iload的关系
图1.1 典型开关电源
负反馈系统
我们不能简单地将dc-dc变换器的占空比设置为一个固定值以期望在所有条件下都能获得给定的恒定输出电压。采用负反馈的方法可以通过建立一个电路,根据需要自动调整占空比,使得系统即使在有输入电压扰动、负载电流扰动或器件参数变化的情况下,都可以获得期望的高精度输出电压。
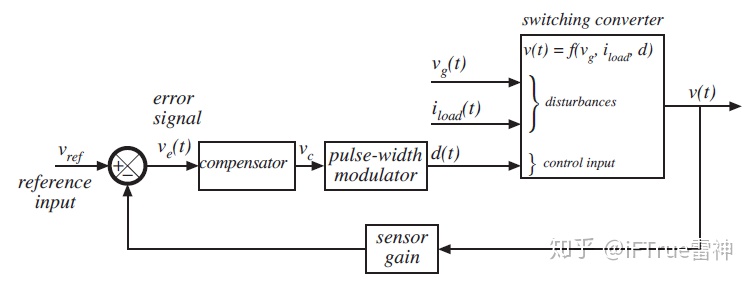
如图1.2所示,是一个典型的负反馈系统框图。输出电压v(t)由“传感器”采样获得,增益为H(s),在直流稳压电源或者dc-ac逆变器中,传感器电路通常是电压分压器。将传感器输出信号H(s)v(s)与参考输入电压vref(s)进行比较,目标是使得H(s)v(s)等于vref(s),以便v(s)精确地随vref(s)变化(不考虑校正器、脉宽调制、门级驱动或者变换器功率级上的扰动分量)。
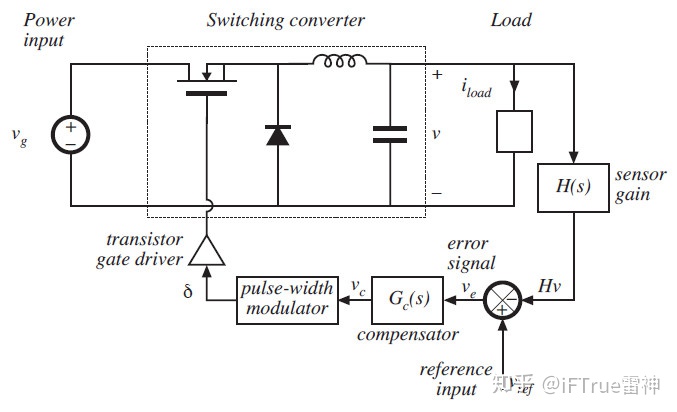
(a) 带有反馈环节的Buck变换器控制框图
(b) 反馈系统控制框图
图1.2 带有负反馈的输出电压调节环路
参考输入电压vref(s)与传感器输出H(s)v(s)之差称为误差信号ve(s)。如果反馈系统工作良好,则vref(s) = H(s)v(s),使得误差信号等于0。在实际应用中,误差信号通常是非零的,但仍比较小。在图1.2中,增加了校正器网络Gc(s),目的之一就是为了获得一个较小的误差。
注意,输出电压v(s)等于误差信号ve(s)乘以校正器、脉宽调制器和变换器功率级的增益。如果校正器增益Gc(s)的幅值足够大,那么一个小的误差信号就可以使得直流稳压电源产生所需的输出电压v(t) = V(问题:H(s)和Vref(s)该如何选择?)。因此,较大的校正器增益会使得误差变小,从而提高输出信号跟随参考输入信号的精度。这是反馈系统的关键思想。
系列章节内容预告
在接下来的几期中,我们将使用平均小信号变换器模型来研究反馈对调节器小信号传输函数的影响。开环增益T(s)定义为前向通道及负反馈通道所有增益的乘积。首先,我们将会发现“扰动对输出”的传递函数中包含乘数因子1/(1+T(s)),因此,当开环增益T(s)幅值较大时,扰动对输出电压的影响将会变小。其次,一个较大的开环增益也会使得输出电压v(s)几乎等于vref(s)/H(s),进而几乎不依赖于反馈环路的前向通道增益。因此开环增益的幅值||T||是一个衡量反馈系统更好工作的重要指标。
稳定性是反馈系统中的另一个重要问题。增加反馈回路有可能会导致正常工作的电路出现振荡、振铃和超调等不良特性,这时就很有必要使用相位裕度准则对系统进行稳定性评估,当开环增益相角裕度为正时,反馈系统稳定,增加相位裕度会使系统的瞬态响应表现得更好,使得超调和振铃变得更小。
第5小节将会给出一个直流调节系统校正器的设计示例。校正器的设计是为了使系统获得足够的相角裕度和良好的抗干扰能力;采用超前校正器或P-D控制器,能够提高系统相角裕度,扩展反馈回路的带宽,这可以更好地抑制高频扰动;采用滞后校正器或P-I控制器,能够提高低频环路增益,这可以更好地抑制低频干扰并且使得稳态误差变小。另外,组合校正器可以结合以上两种方法的优点。
第6小节中将会介绍注入法实验测定开环增益的步骤。使用电压或电流注入解决了在高增益系统中建立正确静态工作点的问题,并给出了获得精确测量的条件。另外,注入法也可以用来测量不稳定系统的开环增益。
2 负反馈对网络传递函数的影响
▼
以buck变换器为例,其小信号等效电路模型如图2.1所示。
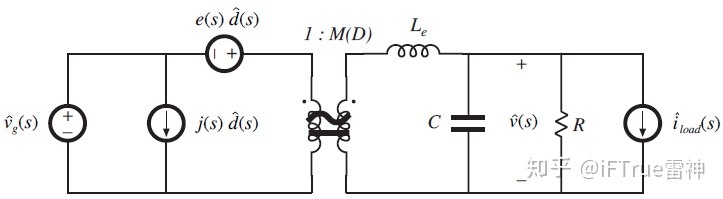
图2.1 描述占空比d,输入电压vg和负载电流iload的Buck电路小信号模型
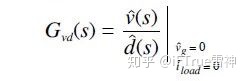
图2.1中描述的等效电路包含三个独立的输入量:控制输入变量占空比^d,输入电压变量^vg和负载电流变量^iload。因此,输出电压变量^v可以表示为三个独立输入的线性组合,如下所示:

其中,“控制-输出”的传函为
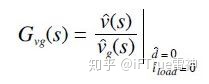
“线路-输出”的传函为
输出阻抗为
在图2.2(a)中,将图2.1的变换器模型与控制电路框图相结合,图2.2(b)为由传递函数组成的带有负反馈系统的完整buck变换器控制框图。其中,Gc(s)为校正器传函,1/VM为PWM调制器传函,Gvd(s)为变换器功率级传函,H(s)为反馈环路采样增益。
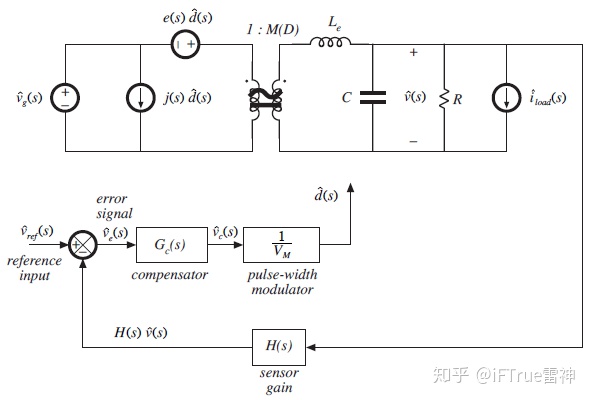
(a) 带有buck变换器等效模型的控制框图
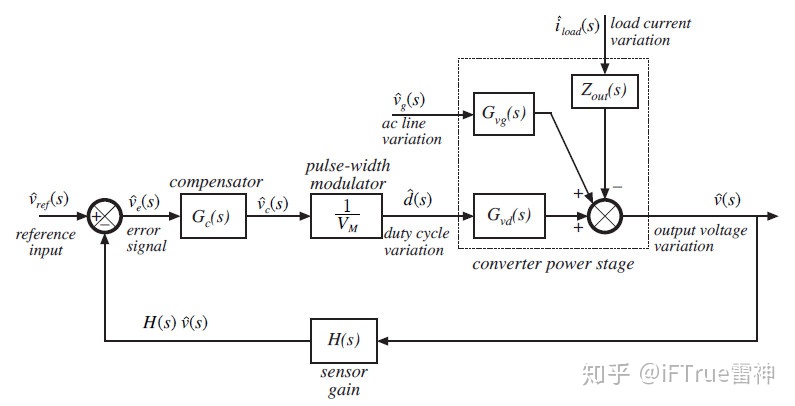
(b) 完整控制框图
图2.2 电压调节系统的buck变换器小信号模型
由图2.2(b)求解输出电压,得

上式可以写作如下形式(记号1)

其中,定义

为开环传递函数,即开环增益T(s)=前向通道及负反馈通道所有增益的乘积。
以上公式(记号1)表明了添加负反馈对系统输出电压的影响,具体影响方式将在下面具体介绍。
2.1 反馈环节的特点:减小“扰动-输出”传递函数
对于线路扰动,原始(开环)“线路-输出”传递函数为:
加入负反馈时,“线路-输出”传递函数变为
可以看出,反馈环节使得“线路-输出”传递函数减小了1/(1+T(s))倍。当T(s)幅值较大时,“线路-输出”传递函数将会明显减小,也就是说由vg扰动变化引起的输出电压v变化将会通过反馈回路衰减。
对于负载电流扰动,原始(开环)输出阻抗:
加入负反馈时,输出阻抗为
可以看出,反馈环节使得输出阻抗减小了1/(1+T(s))倍。当T(s)幅值较大时,输出阻抗幅值将会明显减小,因而负载电流扰动对输出电压的影响将会减小。
2.2 反馈环节的特点:降低“给定-输出”传递函数对前向通道增益变化的敏感性
“给定-输出”闭环传递函数为
当开环增益T(s)幅值较大时,例如:当|| T || >> 1时,(1+T) ≈ T且T/(1+T) ≈ T/T = 1,则传递函数变为
可以看出,此时“给定-输出”闭环传递函数与前向通道增益(包括校正器传函Gc(s)、PWM调制器传函1/VM和变换器功率级传函Gvd(s))无关,也就是说开环增益T(s)幅值较大时,反馈环节的加入能够使得输出电压能够更好的跟随给定电压而与控制器、PWM调制器和功率电路的参数关系不大。
该结论同样适用于直流量
因此,要使直流输出电压V完全跟随直流参考电压Vref,只需保证直流反馈回路传感器增益H(0)和直流参考电压Vref已知且准确,且开环增益T(0)足够大即可。这样减小了输出电压对前向增益的敏感度,增加了输出电压对反馈增益和参考输入的灵敏度。因而,通常情况下,精密采样电阻常用于实现反馈回路H,但在控制器Gc、PWM调制器或功率级电路中不需要使用高精度的元件。















 1259
1259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









