





动态规划是算法里一个很重要的思想,在腾讯,网易等各大公司的笔试面试中经常遇到。
动态规划的思想是将一个问题分解为若干个子问题,对每个子问题求最优解,前一个子问题的最优解,为下面的子问题提供了有效信息,依次解决子问题,最后一个子问题就是初始问题的最优解。动态规划应用于子问题重叠的情况,子问题的划分是通过递归实现。为了避免子问题的重复计算,保证每个子问题只求解一次,会将解保存在数组中。

动态规划的基本步骤如下:
1.刻画一个最优解的结构特征;
2.递归定义最优解的值;
3.计算最优解的值,通常采用自底向上的方法。

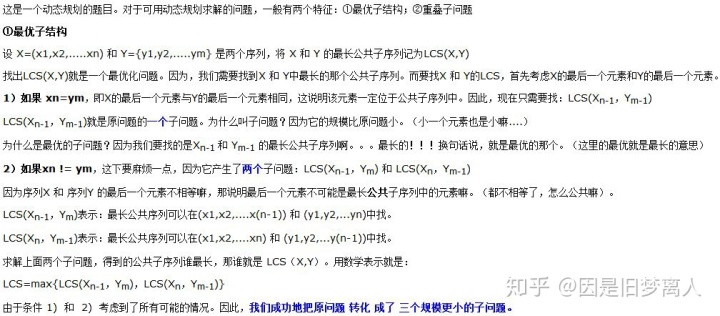
那么,什么时候采用动态规划的思想呢?动态规划的问题一般有两个特征:(1)最优子结构。如果一个问题的最优解包含子问题的最优解,那么该问题就具有最优子结构;(2)重叠子问题。如果递归算法反复计算相同的子问题,那么该问题具有重叠子问题。如果在递归的每一步都生成新的子问题,那么要用分治法解决。
我们来看下面这道2017年腾讯实习生笔试题:
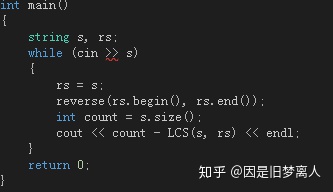
求解最长回文串,即正序和逆序一样,可以将s的逆序表示出来,求逆序s和正序s的最长公共子序列,该最长公共子序列即最长的回文串。那什么是最长公共子序列呢?


接下来,该问题就转化成了求最长公共子序列的问题,而求解此类问题,就用到了动态规划。求最长公共子序列,思想如下:
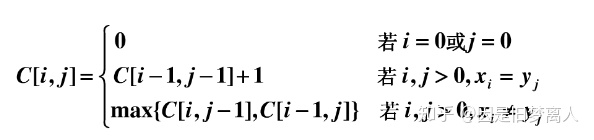
递推式如下,c[i,j]表示(x1,x2....xi) 和 (y1,y2...yj) 的最长公共子序列的长度。
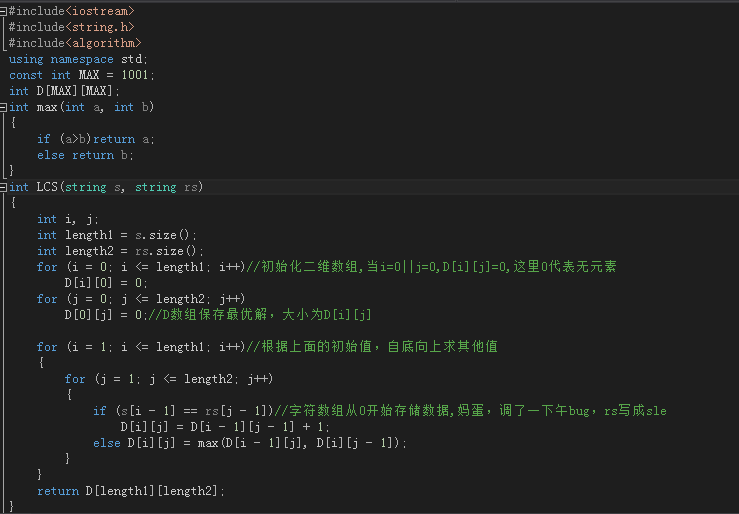
如果不采用动态规划,只用递归,代码如下:
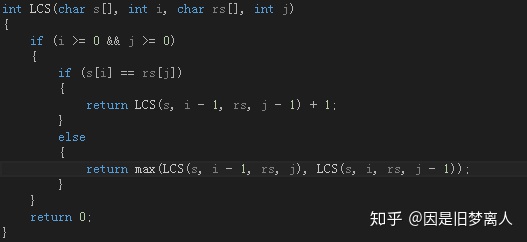
提交运行后会显示超时运行。因为子问题被重复计算,LCS(s,i-1,rs,j)和LCS(s,i,rs,j-1)都包含了子问题LCS(s,i-1,rs,j-1)。因此下面采用动态规划来解决。

在上述代码中,D[i][j]代表大小为i+1*j+1的数组,为什么要+1呢?这里用0表示无元素,所以初始化阶段,数组值如下:
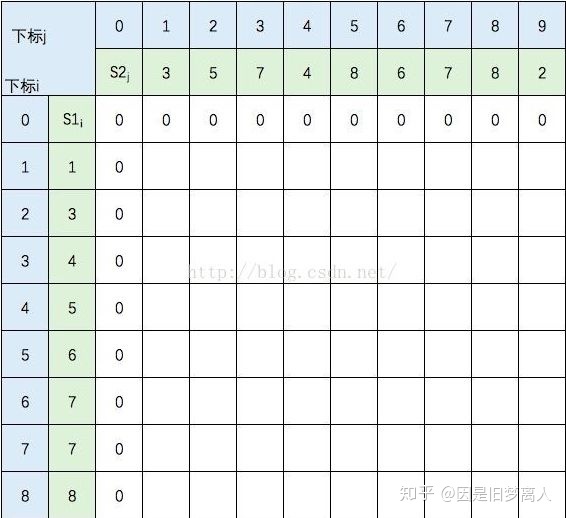
然后循环,依次把二维数组填满即可。
总结一下,所谓动态规划,就是在解决具有最优子结构和重复子问题两种特性的问题时,把求解子问题的递归方法改成用数组保存结果的方法,数组的值不再用递归求得,而是用递推公式求得,然后就可以直接查表实现。
参考来源:
[1] 算法导论
[2]https://www.cnblogs.com/hapjin/p/5572483.html
[3]http://blog.csdn.net/baidu_28312631/article/details/47418773
本文所有代码均为本人编写并经过测试,如有错误或问题,欢迎留言或私信指正。















 647
647











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









