





讲完了李群和李代数,就轮到最小二乘优化了。和之前一样,应该会是一系列文章。这一章就先讲讲一些基本的概念和常见的最小二乘算法。
1.问题的定义
一个最小二乘问题的定义如下:
寻找一个关于下列函数的局部最小值
这里,
而局部最小值的定义为:
给定
这里,
假设损失函数F是光滑、可微的,就可以对其进行泰勒展开:
其中,g是一阶导数(gradient):
而H为海塞矩阵(Hessian)
显然,如果
如此,可以先给出一个局部极小值的必要条件:
如果
我们知道,满足上述条件的点包括:局部极小值,局部极大值和鞍点,统称为驻点(stationary point)。为了判断一个驻点
由海塞矩阵的定义可知,H是一个对称矩阵。如果它同时是一个正定矩阵的话,那么其特征值会大于某个数值
显然,此时
由此,可以得到一个局部最小值的充分条件:
假定
显然,如果H是一个负定矩阵,那么x是一个局部极大值;如果H既有正的特征值,又有负的特征值,那么s就是个鞍点。
2. 迭代梯度下降方法
对于非线性优化方法,其解法基本都是迭代方法:给定一个起始点
回到F的泰勒展开式,我们有
可以看到,如果
很显然,基本所有下降方法都可以概括为以下两步:
1. 找到一个下降方向
2. 找到一个迭代步长使得F的值减小;
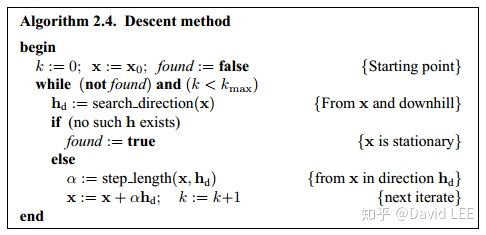
其中,这个步长
2.1 最速下降法
由前面的等式可以得到
该方程表示的是方程F的相对下降(relative gain)。可以发现, 它在
由此,可以得到最速下降法的下降方向
最速下降法的特点是在刚开始的阶段有较好的表现,但是到了最后是线性收敛。
对此,也诞生了混合方法(hybrid methods):在开始阶段使用一种方法,在最后阶段使用另一种方法。
2.2 牛顿法
我们知道,对于局部极小值有
令上式等于0就可以得到牛顿法:
下次迭代就有
如果H是正定的(说明上式具有唯一解),即对于所有
说明
牛顿法在最后的收敛阶段有很好的表现,在一定条件下(局部最小值附近的H是正定的且x已接近局部最小值),其可以达到二次收敛。
问题在于,如果H是负定的,且附近有一个局部最大值,牛顿法可能会收敛至该局部最大值。我们可以要求损失函数每一步都是减小的,或者使用如下的混合方法:

2.3 置信区域法和阻尼法
使用一个模型L来拟合F在其临域内的行为,则有
可以看到,L是F的二次泰勒展开式的一个近似。其中,c来近似梯度,而B为近似的海塞矩阵。
对于置信区域法,我们认为这个模型L在一个限定范围
而对于阻尼法,有
阻尼因子
算法2.4就可以变为
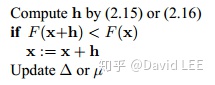
其实就是如果h满足下降条件,则
考虑到L是对F的临域的模拟,算法更新失败可能就是h(步长)太大了,导致近似不太好。为了衡量L对F的拟合度,定义一个gain ratio
对于置信区域法和阻尼法,常见的更新策略为
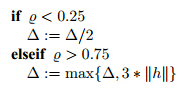
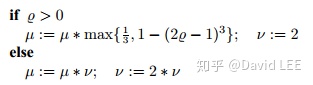
算法对于其中的常数的设置并不敏感,重要的是选择合适的值使得
3. 非线性优化算法
前面的损失函数还可以展开为如下形式:
误差函数f(x)的泰勒展开式为:
其中,雅可以矩阵J可以写为
如此一来,损失函数F的微分就可以写成:
将它写成矩阵的形式就有:
最后,F的二阶导(海塞矩阵)为:
3.1 高斯-牛顿法
GN算法基于对误差函数f的线性近似:
因此,损失函数F就变为
L 的梯度和海塞矩阵就是:
而且,如果梯度J是满秩的,那么L的海塞矩阵H就是正定的,说明L(h)拥有唯一的极小值。
通过令L'(h) = 0就可以得到GN算法的解:
可以证明,
3.1.1 收敛速度
上一小节提到过,牛顿法可以达到二次收敛。但GN法却不行。为此,我们可以对比这两种方法:
已知这两个等式的右边是一样的,但是等式左边却是不一样的:
显然,如果
3.2 Levenberg-Marquardt 法
LM算法是阻尼法的一种,其步长可以这么算出:
其中,u是拉格朗日算子,它有以下作用:
1. 对于u > 0,可以保证系数矩阵是正定的。这就保证了
2. 如果u值很大,那么
3. 如果u值很小,那么
因此,阻尼因子同时影响了当前迭代的方向和步长。其更新方式在前面已经介绍过了,而初始值可以根据
对于
其更新策略同样是计算gain ratio:
其中,
注意到等式最后两项必然是正的,因此,就像前面说的,
最后,LM算法的流程如下:
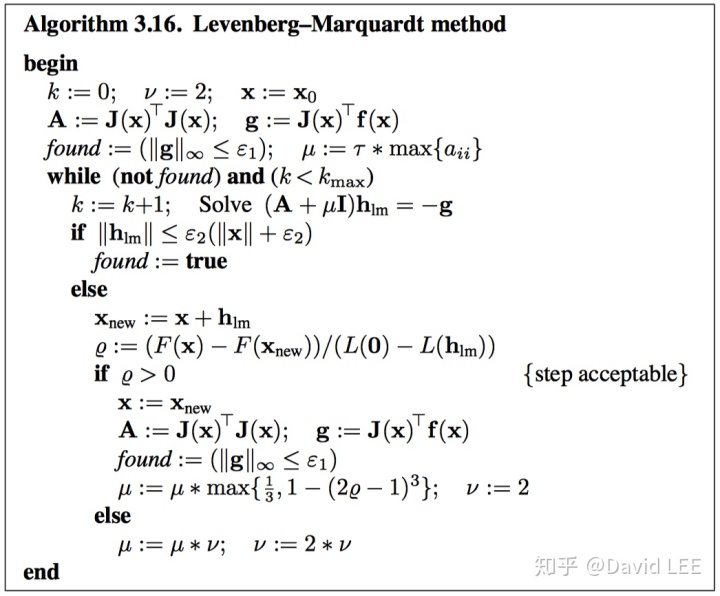
3.2.1 停止条件
首先,当算法到达一个最小值时,有
这里,
此外,第二种停止条件为在x变化很小时停止:
这说明了在x数值较大时,使用前者(相对量)来说为停止条件;在x数值较小时,使用后者(绝对量)来作为停止条件。
最后,还可以限制迭代次数:
3.3 狗腿法(Powell's dog-leg method)
我们已经知道,GN算法通过求解如下等式(normal equation)得到迭代方向和步长:
而最速下降法则用逆梯度方向作为迭代方向:
其步长可以通过以下方式得到:
对损失函数则有
通过对上式进行求导,并令导数为0可得
这样一来,在更新x的时候,我们就有两个可选的解了:
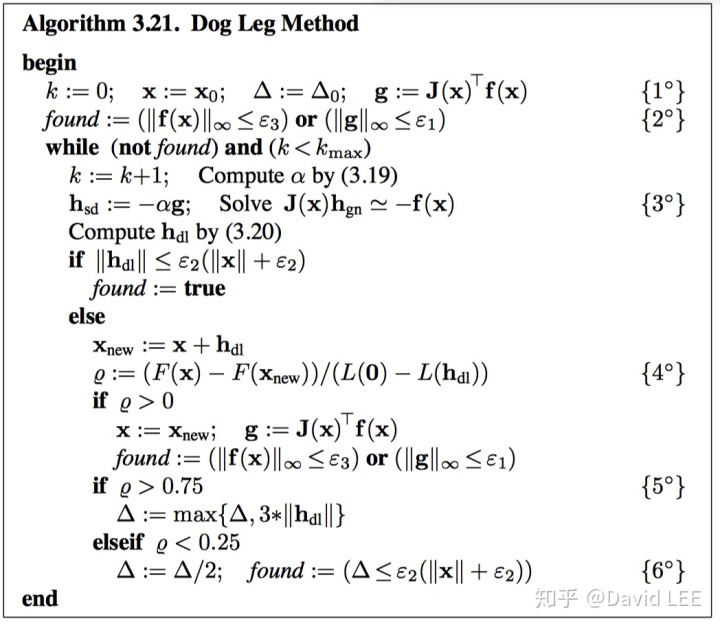
而狗腿法是一种置信区域方法。其选取迭代方向和步长的方法如下图所示:
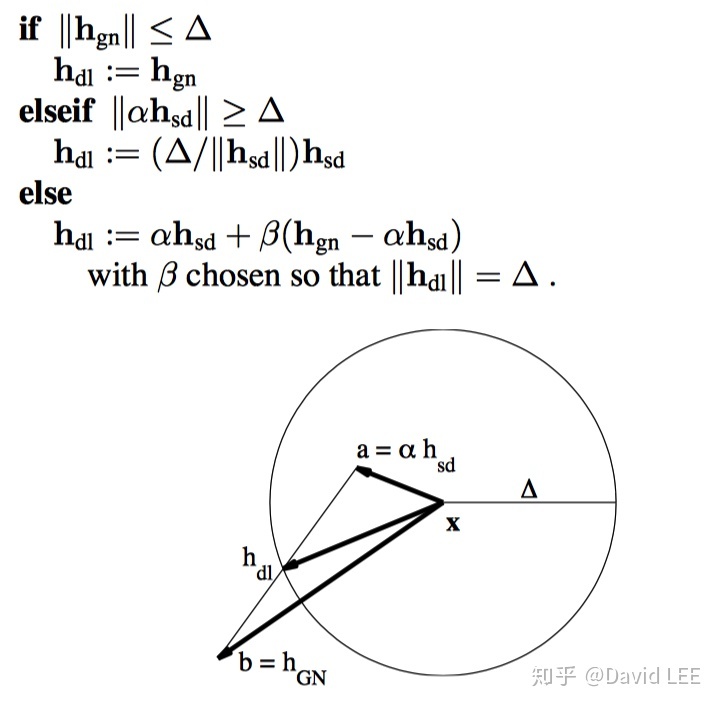
通过上图可以发现,还有一个参数
则有
最终的算法如下图所示
参考文献:METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS
如果觉得有用,还请点个赞: )















 3436
3436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









