





机器人控制系统设计目的和要求
目的:现有的机器人控制器存在诸多问题,需设计一个开放式结构的模块化,标准化机器人控制器,而且设计过程中要尽可能做到模块化
要求:要求设计开放式结构的机器人控制器的过程中要尽可能做到模块化
意义:具有开放式结构的模块化,标准化机器人控制器的研究对提高机器人性能和自主能力,推动机器人技术的发展具有重要意义
模块化是系统设计和建立的一种现代方法,按模块化方法设计,系统由多种功能模块组成,各模块完整而单一,这样建立起来的系统,不仅性能好,开发周期短而且成本较低
选用matlab的优点
1.可建立简单易用的开放式的机器人控制器
2.能在实际加工硬件之前,能够观察到设计的机器人的运动状况并及时修改设计方案,减少设计周期并能降低开发成本
3.可以摆脱繁复的c代码编程
串行处理结构(单CPU结构,集中控制分式)
存在问题:计算负担重(离线规划,前馈补偿解藕),实时性差
解决方法:选用高档次微机式小型机,采用多处理器作并行计算,提高控制器计算能力
并行处理结构(提高计算速度,满足实时性)
提高机器人动力学算法计算速度也为实现复杂的控制计算
开发并行算法途径:改造串行算法,使之并行化,将算法映射到并行结构
1.考虑结合的并行处理器结构,根据结构所支持的计算模型,开发算法的并行性
2.首先开发算法的并行性,设计并行处理器结构,达到最佳并行速度
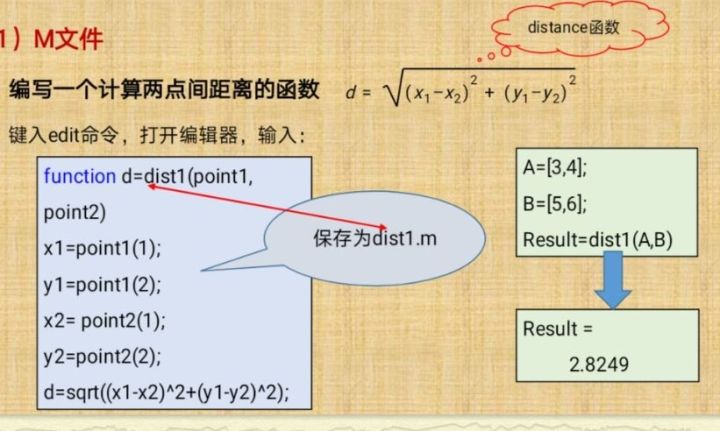
M文件分为脚本文件和函数文件
脚本文件:用于执行一系列简单的matlab命令自动按照文件中程序顺序来执行文件的各条命令
函数文件:可接受其他函数传来的参数,也可将计算结果返回到调用自己的原函数中
1.两点间距离函数
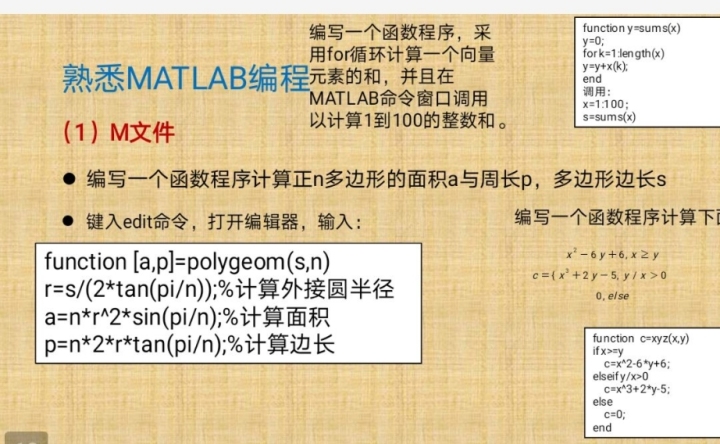
2.for循环1-100和
3.计算正n多边形的面积a与周长p,多边形边长s
4.if else
变量命名规则
1.必须以字母或下划线开头,不能是数字,标点符号,后面可以跟字母,数字和下划线
2.变量名的长度有要求,namelengthmax查询
3.区分大小写
变量初始化
1.赋值语句初始化变量
2.input输入初始化变量
算术/数组运算符

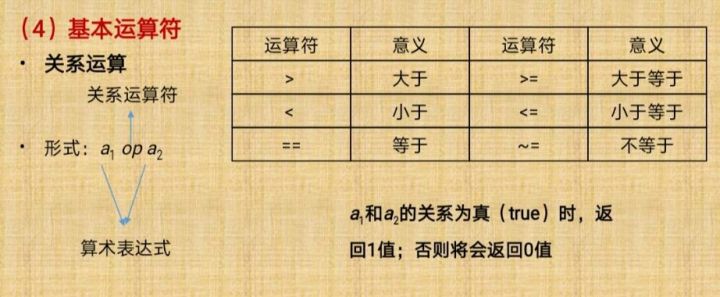
关系运算符
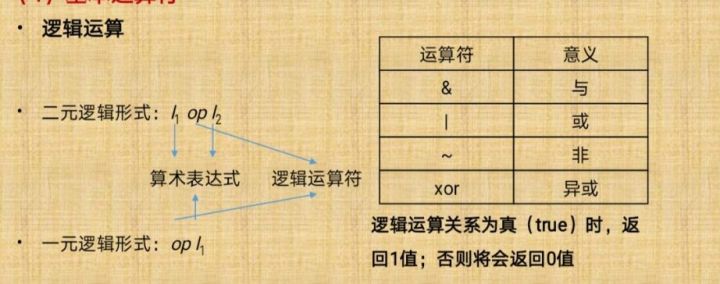
逻辑运算
基本语法结构
1.顺序结构
缺点:无法进行多次重复运算程序,也不能根据输入的值,有选择地执行程序的某些部分
2.循环结构
例:设x=2.1,表达式fx=x^2-x-1,计算ffffff...fx十个f
a.while循环
x=2.1;
n=1;
while n<=10
y=方程式;
x=y;
n=n+1;
end
y
b.for循环
x=2.1;
for n=1:10
y=方程式;
x=y;
end
y
break语句(立即终止循环)
continue语句(结束本次循环,常与if语句配合使用)
Ctrl+C强制停止运算
绘图基础
绘制二维图形,plot(x,y)
t=0:0.01:2*pi; 给定时间范围和步长
y1=sin(t);正弦函数
y2=cos(t);余弦函数
plot(t,y1,t,y2)绘制函数曲线
legend('正弦曲线','余弦曲线')添加图例
grid on 显示网格线
xlabel('时间(s)')为x轴加标签
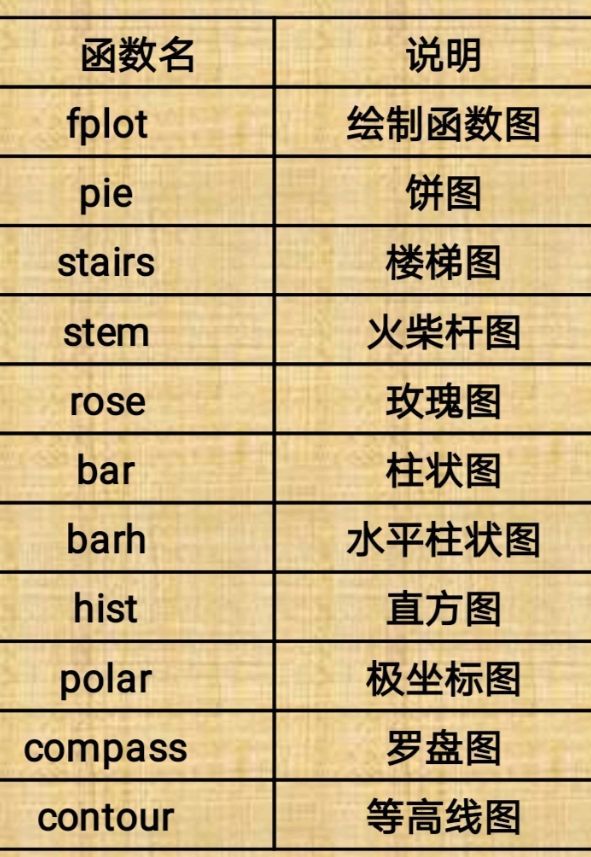
函数名
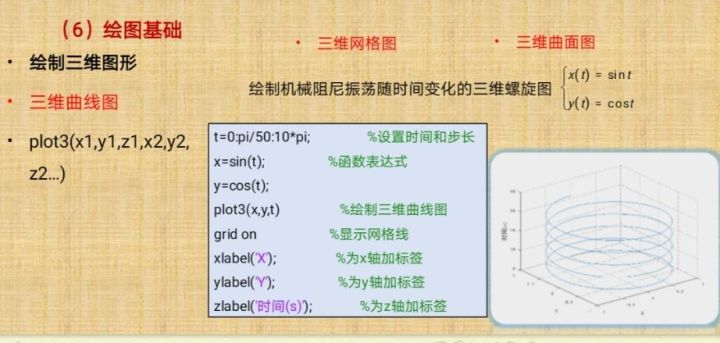
绘制三维图形
子系统
优点:让系统的结构设计更为清晰
模型建立者:可以更好的考虑模型全局,优化模型结构
模型使用者:更好理解模型整体与各组成部分之间的关系
方法:正在搭建的模型,在模型窗口拖入subsystem模块
已建好模型,模型非常大快捷键Ctrl+G
simulink仿真实例(RLC电路)
公式推倒

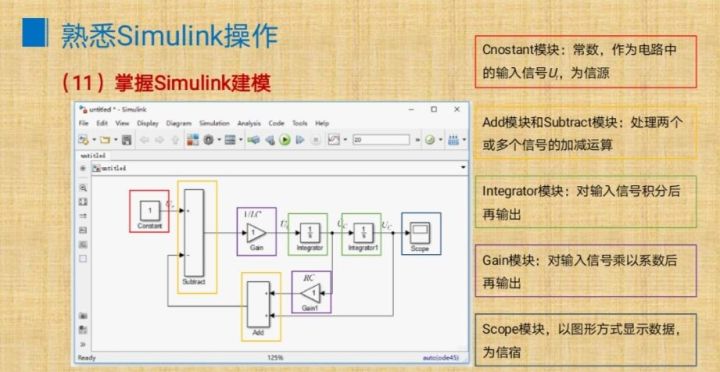
simulink建模
弹簧阻尼
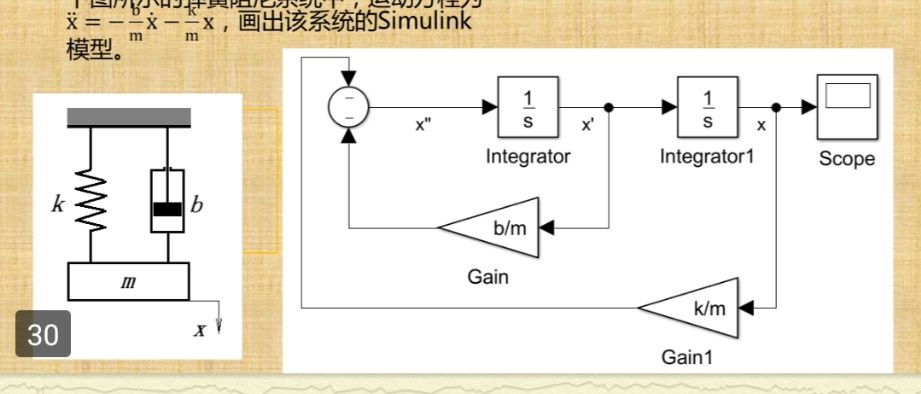
单自由度机械系统的微分运动方程
SCARA机器人
优点:水平方向灵活性好,垂直方向有很高的刚性,速度快,柔性好,安装场合受限少,容易与生产线匹配,非常适合柔性自动化生产的要求
应用:电子元器件,机械行业和食品医药等产品的抓取,搬运,装配等工序中
位姿描述
1.位置描述
2.姿态描述
D-H矩阵计算
建立连杆坐标系,连杆间变换矩阵,机器人末端相对基座的位姿矩阵















 2870
2870











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









