





算法一: 直接与平面相交 + 交点是否处于三角形内部
直线与三角形相交,首先三角形是在平面上,直线与平面的交点比较容易求得。
平面公式:
直线可以写成:
代入:
当我们计算出来 t 之后,再代回原公式得到交点P:
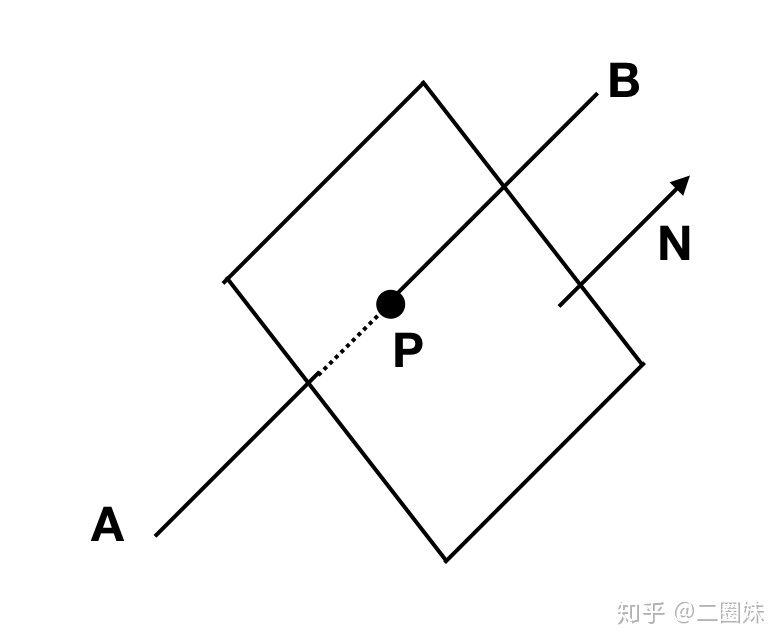
这里有一点点危险的地方
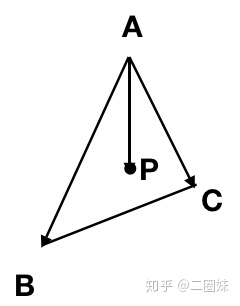
当直线与平面相交之后,我们需要判断交点是否在三角形内, 之前在二维平面上,我们用过这样的办法: 判断
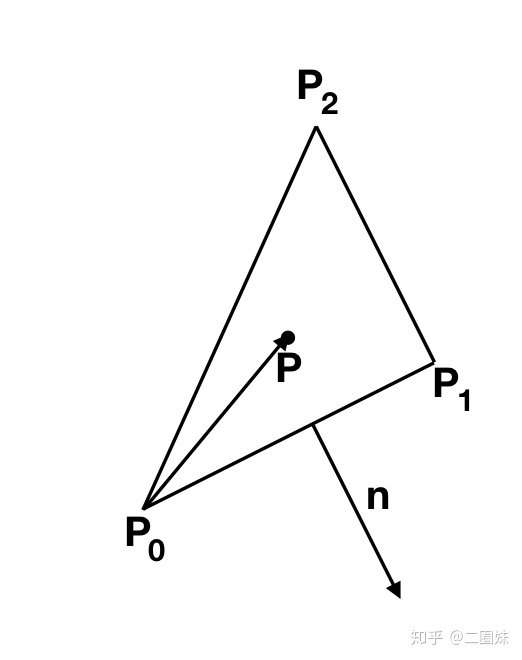
实际上这个思路也可以推广到三维:

n 是三角形的normal,也是平面的normal是
查看另外两边,也会有类似的效果,所以三角形和射线相交可以这样写:
bool ray_triangle_intersect(const Vec3f A, const Vec3f B, const Vec3f p0, const Vec3f p1, const Vec3f p2){
// 1. find the p point
Vec3f n = cross(p1 - p0, p2 - p0);
float d = -n*p1;
Vec3f AB = B - A;
if (fabsf(n*AB) < epsilon) return false;
float t = (-d - n*A )/(n * AB);
// t < 0 means opposite direction of AB
if (t < 0 ) return false;
Vec3f p = A + AB*t;
if (cross(p1-p0, p-p0) * n < 0 ) return false;
if (cross(p2-p1, p-p1) * n < 0 ) return false;
if (cross(p0-p2,p-p2) * n < 0 ) return false;
return true;
}
当然我们交点P也是直接求出来了。
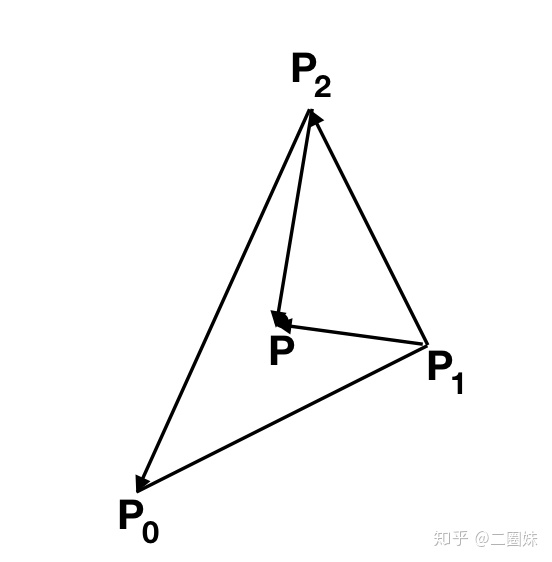
算法二: 重心坐标系
重心坐标系我之前也写过 → 三角形重心坐标
实际上重心坐标系也叫面积坐标,如果三角形面积为1的话,那么P点分割的三角形有以下性质:
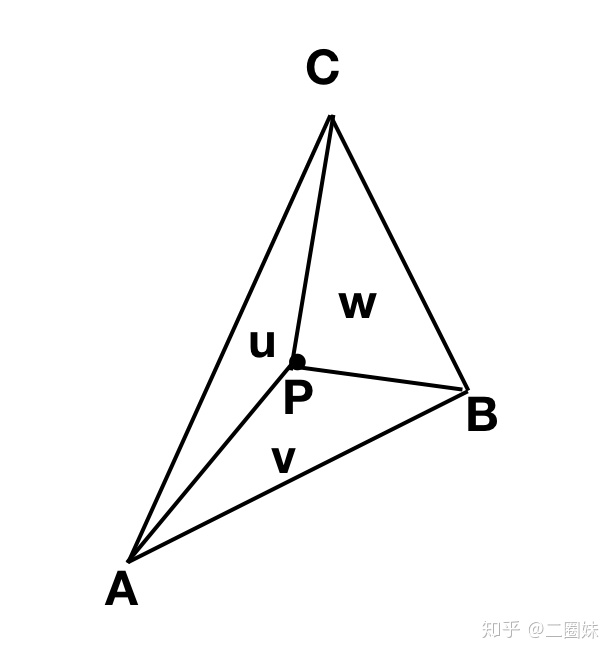
如果想验证也很简单:
所以这给我们提供了一个比较简单的重心坐标系的算法,再结合算法一,我们可以很容易的算出 u, v.
// AB: ray, p0p1p2: triangle
bool bary_centric_coordinate(const Vec3f A, const Vec3f B, const Vec3f p0, const Vec3f p1, const Vec3f p2, float &u, float &v){
// 1. find the p point, same as above
Vec3f n = cross(p1 - p0, p2 - p0);
float area = n.norm();
float d = -n*p1;
Vec3f AB = B - A;
if (fabsf(n*AB) < epsilon) return false;
float t = (-d - n*A )/(n * AB);
if (t < 0 ) return false;
Vec3f p = A + AB*t;
// 2. find u,v
Vec3f uvector, vvector;
if (cross(p2-p1, p-p1) * n < 0 ) return false;
if ((vvector = cross(p1-p0,p-p0)) * n < 0) return false;
if ((uvector = cross(p0-p2,p-p2)) * n < 0) return false;
u = uvector.norm()/area;
v = vvector.norm()/area;
return true;
}
实际上代码跟算法一很多部分都是一致的,只是这里我们加了计算 u, v 而已。

Möller-Trumbore 算法
Möller-Trumbore算法我感觉和重心坐标系差不多,只是加入了更多线性代数的优化?三角形依旧是 ABC, 假设光线源点为O,方向为D,有相交点满足:
矩阵形式:
利用Cramer's rule,可知:
其中 T = O - A, E1 = B - A, E2 = C - A.
又线性代数中行列式的性质:
继续:
其中
所以整个计算就是我们无需再去计算 三角形平面的一些性质,取而代之我们用以上式子就可以计算出 t, u, v.
// OD: ray, p0p1p2: triangle
bool ray_triangle_intersect_mt(const Vec3f O, const Vec3f D, const Vec3f p0, const Vec3f p1, const Vec3f p2, float &t, float &u, float &v){
Vec3f e1 = p1-p0;
Vec3f e2 = p2-p0;
Vec3f pvec = cross(D, e2);
float det = e1*pvec;
if (det < epsilon) return false;
Vec3f tvec = O - p0;
u = tvec*pvec*(1./det);
if (u < 0 || u > 1) return false;
Vec3f qvec = cross(tvec, e1);
v = D*qvec*(1./det);
if (v < 0 || u + v > 1) return false;
t = e2*qvec*(1./det);
return t > epsilon;
}
结束
直线与三角形相交是如此重要,是因为有了这些算法,在‘光线追踪’中,我们可以放model来玩,同时在 ‘光栅化’中,利用三角形的重心坐标来做各种插值也算光栅化的基石之一。
代码:
KrisYu/miscellaneousgithub.com
参考:
Fast, minimum storage ray-triangle intersection.
Ray Tracing: Rendering a Triangle















 4882
4882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









