






基于图像的三维重建解释
基于图像的三维重建,是一种通过拍摄一个场景的不同视角的图片,恢复出场景三维模型的方法,三维重建在逆向工程,文物保护,增强现实等领域有着广泛的应用。
本文只总结流程,不做算法的详细解释
主要流程有:
- 图像特征点检测与匹配;
- 通过对极几何恢复相机模型
- SFM(Structure from motion)方法生成稀疏点云
- MVS(Multi view Stereo)方法生成稠密点云
- 将点云重建为网格模型
- 添加纹理和贴图
图像特征点检测与匹配
特征点检测是三维重建的第一步,可以理解成检测出图像中与周围像素不同的点,然后储存进列表,特征点检测算子有很多,方法也都是现成的,比如harris,sift,surf,后两个最常用。
匹配原理是通过对两幅图像储存的特征点按一定算法进行匹配,从而判断不同图像上的点是不是同一个点。常用的两个概念:尺度不变性(同一个特征点能在不同尺度下被检测),旋转不变性(特征点旋转以后依旧能正确匹配)
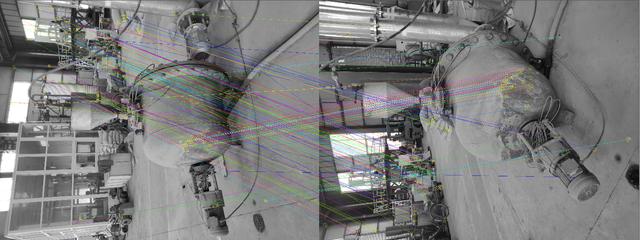
特征匹配图像
相机模型与对极几何
1.相机模型
相机的表达是三维重建的基础,必须标定了相机参数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3314
3314











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









