





假设实验前我们测定一个线性的关系,测量有三组数据,(1,1)、(2,2)、(3,3),认为它们在直线y=Cx+D上,所以将三个点坐标代入直线,得到:
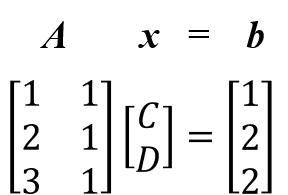
我们要求这个方程组Ax=b,因为实际上这三个点并不在一条直线上即b不在A的列空间中,所以这个方程组无解。
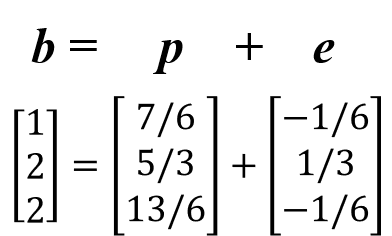
所以去求最优解,将b投影到A的列空间中。
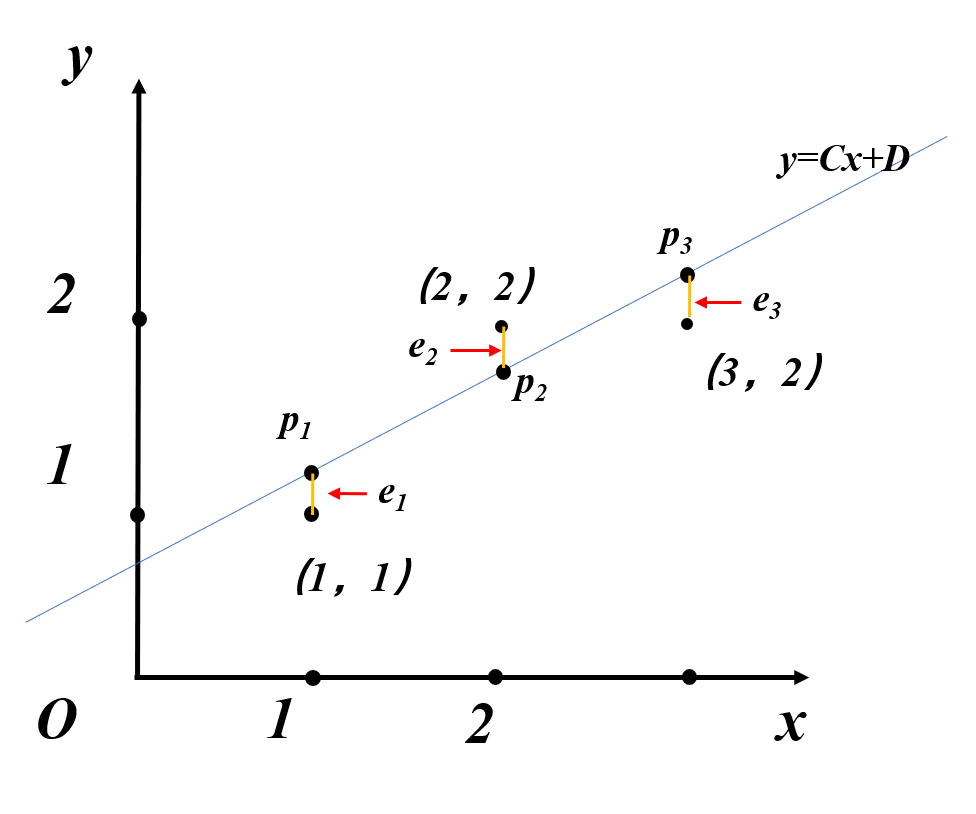
此时p在A的列空间中,p与b之间隔着误差|e|=|Ax-b|,我们保证误差最小化即得到最优解

如果从微积分角度去求解这个问题,就是关于f(C,D)的二元函数的极小值问题,分别去对C和D求偏导数令其为0,最后会得到一个关于C和D的二元一次方程组,而这个方程组就是我们需要的
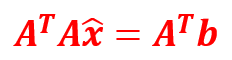
现在我们直接从这个公式出发
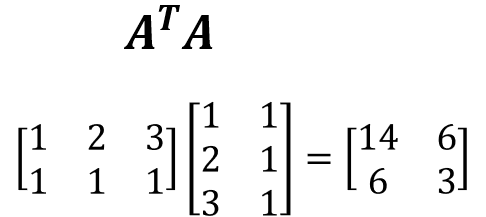
再把b加进来做增广矩阵一起计算,就可以得到上面公式的结果
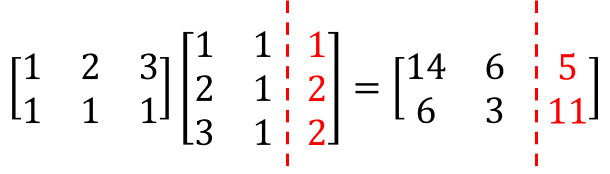
化为正规的方程组
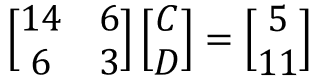
解得C=1/2,D=2/3,所以这里的直线是y=1/2x+2/3
这就是最小二乘法求线性回归方程的思想,利用最重要的公式做线性回归分析
这说明了对于一个矩阵A而言,它可能并不一定是一个好的矩阵,但是A^T·A是一个对称的方阵,这是一个好的矩阵,我们用好的矩阵替换原先的矩阵,就可以使得一个无解的方程变得有解,这个解是原方程的最优解。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









