






作者:Jose Garcia
翻译:吴振东
校对:张一豪
本文约4000字,建议阅读14分钟。
本文将利用OpenCV,Python和Ubidots来编写一个行人计数器程序,并对代码进行了较为详细的讲解。
数字图像处理(DIP)技术目前发展非常迅速,这在很大程度上要归功于开发人员可以访问云来运用机器学习技术。通过云处理数字图像可以绕过任何专用硬件的要求,这使得使用DIP成为了大家的首选。作为处理图像最经济和最通用的方法,DIP已经被广泛应用。这种其中最常见的当属行人检测和计数 - 这对于机场、火车站、零售店体育馆、公共活动和博物馆来说都是一项非常有用的指标。
现有的传统行人计数技术不仅价格昂贵,而且它们所生成的数据通常与专有系统相关联,这些系统限制了数据提取和KPI的优化选择。相反,使用你的个人相机和SBC的嵌入式DIP不仅可以节省时间和金钱,还可以根据你所关注的KPI来自由定制应用程序,并从云中获取独特的领悟。
使用云来启用DIP IoT(物联网)应用程序可以增强整体的功能性。随着可视化、报告、警报和交叉引用外部数据源(如天气、实时供应商定价或业务管理系统)等功能的增强,DIP为开发人员提供了他们所需的自由空间。
想象一下一家摆着冰淇淋冰柜的杂货店:他们想要追踪统计经过店门口的人数,顾客所选择的产品,以及门被打开的次数和冰柜的内部温度。 从这几个数据点中,零售商可以运行相关性分析,以更好地了解和优化他们的产品定价和冰箱的整体能耗。
为了开启你的数字图像处理应用程序开发工作,Ubidots运用OpenCV和Python来创建了一套人员计数系统教程,用于分析统计给定区域中的人数。其实不仅是统计人数这样简单,添加Ubidots IoT开发平台的资源还可以扩展你的应用程序。在这里,你可以看到如何实现利用Ubidots来构建的实时人数统计仪表板。
在本文中,我们将介绍如何使用OpenCV和Ubidots来实现简单的DIP叠加并创建行人计数器。此示例最适用于任何基于Linux的发行版系统,也适用于Raspberry Pi,Orange Pi或类似的嵌入式系统。
有关其他集成的查询,请与Ubidots支持中心取得联系,以便来了解你的企业如何使用这项增值技术。
目录:
- 应用需求
- 编码 – 8个小节
- 测试
- 创造你自己的仪表板
- 结果展示
1、应用需求
- 任何带有Ubuntu衍生版本的嵌入式Linux
- 操作系统中安装了Python 3或更高版本
- OS中安装了OpenCV 3.0或更高版本。如果使用Ubuntu或其衍生产品,请按照官方安装教程或运行以下命令:
pip install opencv-contrib-python当你成功安装Python 3和OpenCV时,你可以通过这段简单的代码来进行检验(首先在你的terminal里输入‘python’)
import cv2 cv2.__version__你应该在屏幕上看到你所安装的OpenCV版本:

- 按照官方操作指南来安装Numpy,或者运行下面的命令
pip install numpy- 安装imutils
pip install imutils- 安装requests
pip install requests2、编码
可以在这一章节找到检测和发送数据的整个例程。为了更好地解释这段代码,我们将其分为八个部分,以便更好地解释代码的各个方面,让你更容易理解。
第1节:
from imutils.object_detectionimport non_max_suppressionimport numpy as npimport imutilsimport cv2import requestsimport timeimport argparse URL_EDUCATIONAL = "http://things.ubidots.com"URL_INDUSTRIAL = "http://industrial.api.ubidots.com"INDUSTRIAL_USER = True # Set this to False if you are an educational userTOKEN = "...." # Put here your Ubidots TOKENDEVICE = "detector" # Device where will be stored the resultVARIABLE = "people" # Variable where will be stored the result # Opencv pre-trained SVM with HOG people featuresHOGCV = cv2.HOGDescriptor()HOGCV.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())在第1节中,我们导入必要的库来实现我们的探测器,imutils是一个有用的DIP库工具,让我们从结果中执行不同的转换,cv2是我们的OpenCV Python包装器,requests 可以通过HTTP发送数据/结果到Ubidots,argparse让我们从脚本中的命令终端来读取命令。
重要提示:不要忘记使用您的Ubidots帐户TOKEN更改这段代码,如果是学生用户,请务必将INDUSTRIAL_USER设置为FALSE。
导入库后,我们将对方向梯度直方图(Histogram of Oriented Gradient)进行初始化。方向梯度直方图的简称是HOG,它是最受欢迎的对象检测技术之一,已经在多个应用程序中实现并取得成功。OpenCV已经以高效的方式将HOG算法与支持向量机这种用于预测目的的经典机器学习技术(SVM)相结合,成为了一笔我们可以利用的财富。
这项声明:
cv2.HOGDescriptor_getDefaultPeopleDetector()调用了预先训练的模型,用于OpenCV的行人检测,并提供支持向量机特征的评估功能。
第2节:
def detector(image): ''' @image is a numpy array ''' image = imutils.resize(image, width=min(400, image.shape[1])) clone = image.copy() (rects, weights) = HOGCV.detectMultiScale(image, winStride=(8, 8), padding=(32, 32), scale=1.05) # Applies non-max supression from imutils package to kick-off overlapped # boxes rects = np.array([[x, y, x + w, y + h] for (x, y, w, h) in rects]) result = non_max_suppression(rects, probs=None, overlapThresh=0.65) return resultdetector()函数是“神奇”诞生的地方,它可以接收分成三个颜色通道的RGB图像。为了避免出现性能问题,我们用imutils来调整图像大小,再从HOG对象调用detectMultiScale()方法。然后,检测多尺度方法可以让我们使用SVM的分类结果去分析图像并知晓人是否存在。关于此方法的参数介绍超出了本教程的范围,但如果你想了解更多信息,请参阅官方OpenCV文档或查看Adrian Rosebrock的精彩解释。
HOG分析将会生成一些捕获框(针对检测到的对象),但有时这些框的重叠会导致误报或检测错误。为了避免这种混淆,我们将使用imutils库中的非最大值抑制实用程序来删除重叠的框 - 如下所示:
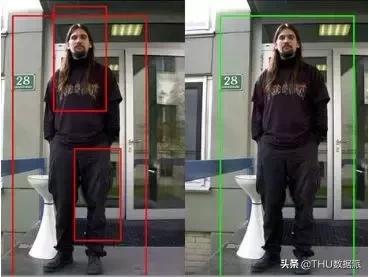
图片转载自https://www.pyimagesearch.com
第3节:
def localDetect(image_path): result = [] image = cv2.imread(image_path) if len(image) <= 0: print("[ERROR] could not read your local image") return result print("[INFO] Detecting people") result = detector(image) # shows the result for (xA, yA, xB, yB) in result: cv2.rectangle(image, (xA, yA), (xB, yB), (0, 255, 0), 2) cv2.imshow("result














 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









