






无人驾驶小知识系列主要的目的是把一些很小而有深度的知识做一个总结,相对没那么系统,胜在日积月累。
视场角
我们都知道激光雷达视场角分为水平视场角和垂直视场角,激光雷达的水平视场角为360°,垂直视场角一般为40°。
- 水平视场角
激光雷达的水平视场角很好理解,激光雷达在水平旋转,旋转一周就是360°。
2. 垂直视场角
激光雷达的垂直视场角是40°,这里要注意2点,一是视场角的偏置,二是激光雷达光束的分布。
- 视场角的偏置 - 视场角的偏置为5°,也就是说激光雷达在水平方向向上的扫描角度为15°,而在水平方向往下扫描的角度为25°。这也很好理解,我们主要是需要扫描路面上的障碍物,而不是把激光打向天空,为了良好的利用激光,因此激光光束会尽量向下偏置一定的角度。
- 光束的分布 - 曾几何时,我也认为激光光束的分布是均匀的,也就是说64线的激光雷达,40°的视场角,那么角度分辨率为40°/64=0.625°,但实际上,激光雷达的光束不是垂直均匀分布的,而是中间密,2边稀疏,还是为了达到既检测到障碍物,同时把激光束集中到中间感兴趣的部分,来更好的检测车辆。
图1是禾赛64线激光雷达的光束示意图,可以看到激光雷达的有一定的偏置,向上的角度为15°,向下的为25°,并且激光光束中间密,2边稀疏。
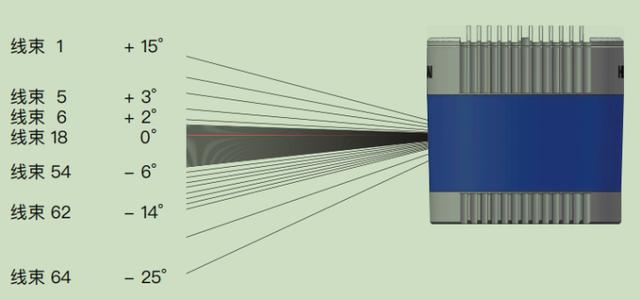
图1 禾赛64线激光雷达光束分布
周期采集点数
激光雷达采集的点数计算如下,首先看激光雷达的线数,比如32线,则垂直方向上会发出32个激光光束,采集32个点,而64线则是64个点,垂直方向上的点数和激光雷达的线数有关系。
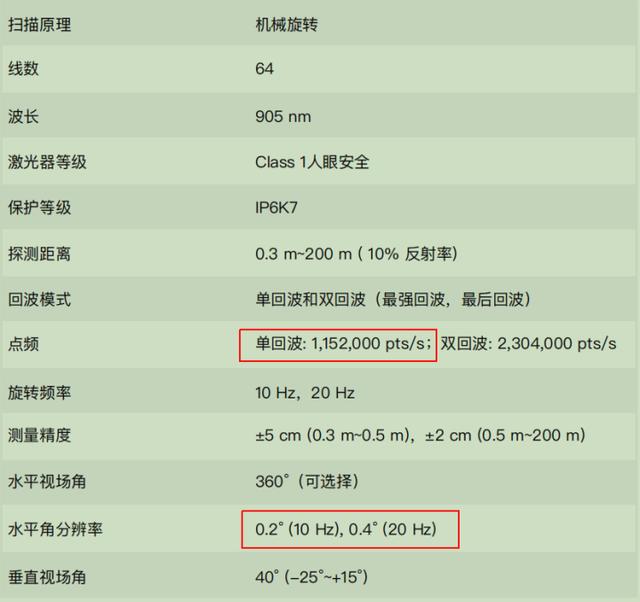
因为激光雷达在旋转扫描,因此水平方向上扫描的点数和激光雷达的扫描频率有一定的关系,扫描越快则点数会相对较少,扫描慢则点数相对较多。一般这个参数也被称为水平分辨率,比如激光雷达的水平分辨率为0.2°,那么扫描的点数为360°/0.2°=1800,也就是说水平方向会扫描1800次。
那么激光雷达旋转一周,即一个扫描周期内扫描的点数为1800*64=115200。图2是禾赛64线激光雷达的参数列表。可以看到扫描频率为10Hz的时候水平角分辨率为0.2°,在扫描频率为20Hz的时候角分辨率为0.4°(扫描快了,分辨率变低了)。输出的点数和计算的也相符合115200 pts/s。
有效检测距离
激光雷达的有效测量距离和最小垂直分辨率有关系,也就是说角度分辨率越小,则检测的效果越好。如图3所示,2个激光光束直接的角度为0.4°,那么当探测距离为200m的时候,2个激光光束之间的距离为200m*tan0.4°≈1.4m。也就是说在200m之后,只能检测到高于1.4m的障碍物了。

图3 激光雷达测量距离
如果需要知道障碍物的类型,那么需要采用的点数就需要更多,距离越远,激光雷达采样的点数就越少,图4分别是激光雷达50m和100m采样到的点数,可以看到100m的时候的点比50m稀疏不少,点数越少,就越难以识别准确的障碍物类型。
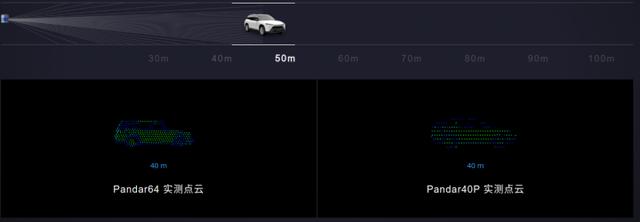
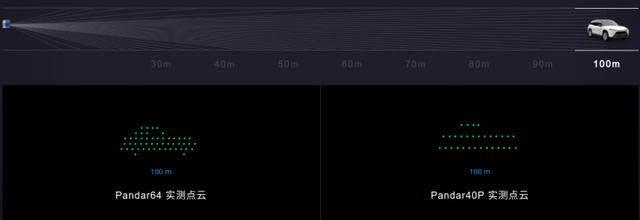
图4 不同距离采样的点数
时间同步
激光雷达提供了时间同步硬件接口,通过GPS提供时钟源给激光雷达,可以保证激光雷达的时间和GPS的时间保持同步,也就是说激光雷达可以保证周期采样的时间非常精准。图5是激光雷达GPS硬件接口说明。
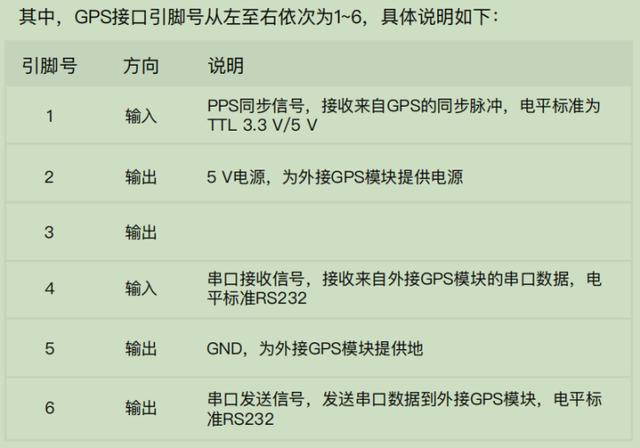
图5 GPS硬件管脚说明
总结
通过上面的分析,我们可以知道激光雷达的水平视场角为360°,垂直视场角有偏置,并且 线束分布不均匀。激光雷达的有效采样点数和激光雷达的线数、采样频率有关系。最后激光雷达的分辨率和最小垂直分辨率有关系,并且距离越远,采样点数越稀疏。激光雷达还提供了时间同步硬件接口,来保证周期采样的时间非常精准。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









