





第16讲 投影矩阵和最小二乘法
Projection matrices and least squares
网易公开课open.163.com
- 投影 Projections
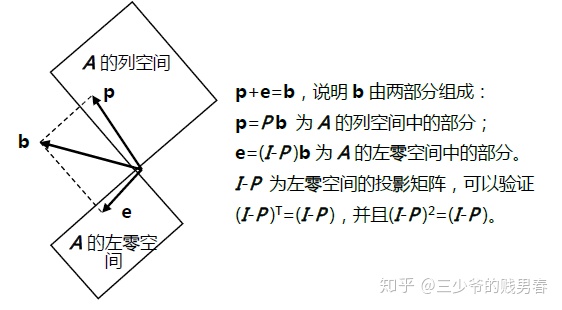
上一讲介绍了投影矩阵
如果向量b本身就在A列空间之内,即存在x使得Ax=b,则有:
如果向量b与A的列空间正交,即向量b在矩阵A的左零空间N(A)中,则有
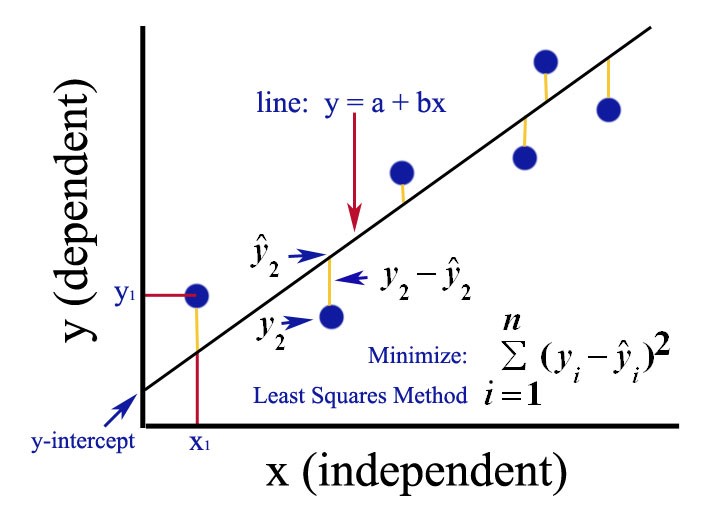
- 最小二乘法 Least Squares
应用投影矩阵求方程组最优解的方法,最常用于“最小二乘法”拟合曲线。
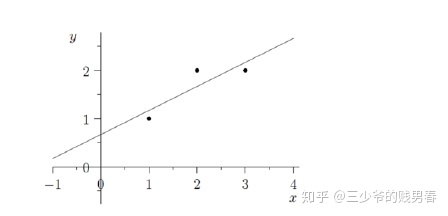
三个点{(1,1), (2,2), (3,2)},求直线方程b=C+Dt,要求直线尽量接近于三个点。
C+ D=1
C+2D=2
C+3D=2
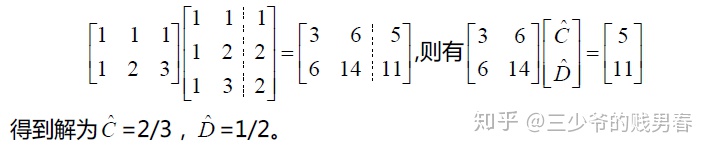
矩阵形式为
这个的方程Ax=b是无解的,解决办法就是求其最优解,最优解的含义即为误差最小,这里误差就是每个方程误差值的平方和
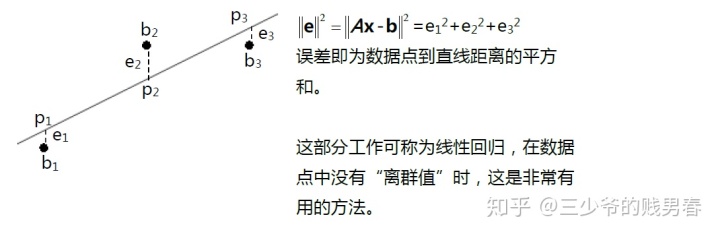
从几何上讨论求解过程,就是试图寻找数据点到直线距离的平方和
现在求解
方程
还可以从误差最小的角度出发求解:
对等号右边的表达式求偏导数,极值出现在偏导数为0的位置。求偏导最终会得到相同的线性方程组和相同的解。
得到直线表达式y=2/3+t/2。将t=1, 2, 3分别代入可得:
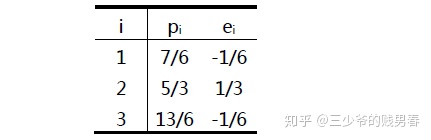
可以验证,向量p与e正交,并且e与矩阵A的列空间正交。
- 矩阵
证明:若A的列向量线性无关时,矩阵
假设存在x使得
如果矩阵的列向量是互相垂直的单位向量,则它们一定是线性无关的。我们将这种向量称之为标准正交(orthonormal)。
例如:














 5292
5292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









