








作者丨孙明珊
学校丨哈尔滨工业大学(深圳)
研究方向丨目标检测

研究动机
在两阶段的目标检测器中,通常利用预先产生的锚点框去拟合待检测的目标,其中包含对目标物的尺寸、长宽比、位置的拟合,然而锚点框的产生通常是离散变化的,因此锚点框的预设定对该类算法的效果有很大影响。
FoveaBox 为了解除这种影响,类比人类视觉系统感知世界的原理,认为人类先判定某个范围物体是什么,然后再对其边缘轮廓进行仔细判定,而不是去匹配任何事先在脑海里设定的模板矩形框,从而开辟了无需锚点框的检测方法:1)预测类别相关的语义图来表征目标存在的概率;2)产生类别无关的可能包含目标物体的矩形框。也正因为其不依靠于默认的锚点框,使得其对锚点框的分布更具鲁棒性。
研究方法
FoveaBox 是个端到端的网络,由提取特征的基础网络和带有双任务的子网络构成,双任务包括了对基础网络输出的每个空间位置进行分类以及对应区域矩形框坐标的预测。整体流程如下图所示:
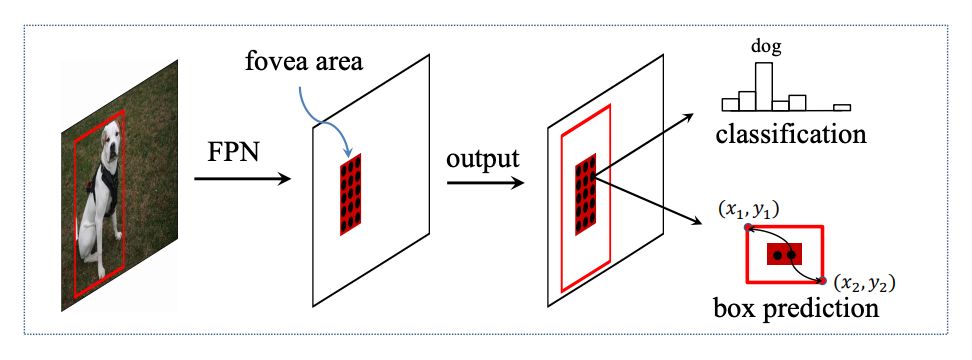
基于特征金字塔(FPN)的基网络
FoveaBox 将特征金字塔每层特征上进行上述两个任务,最后将结果进行合并。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 883
883











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









