







 MapboxVisionSDK利用机器学习进行道路物体识别、交通标识识别和AR导航,包括车辆、行人检测,支持自动驾驶和增强现实。它结合AzureIoTEdge和计算机视觉技术,实现实时导航提示与安全预警,适用于安卓和iOS应用。
MapboxVisionSDK利用机器学习进行道路物体识别、交通标识识别和AR导航,包括车辆、行人检测,支持自动驾驶和增强现实。它结合AzureIoTEdge和计算机视觉技术,实现实时导航提示与安全预警,适用于安卓和iOS应用。
一.基本概念
Mapbox Vision SDK 使用机器学习的方式,动态地对马路上的车、物、人等物体进行分析,结合导航 SDK 和 AR 技术实现 AR 导航。
Mapbox Vision SDK是一个特定的例子,它专注于为移动设备提供基于位置的视觉识别功能,特别是在自动驾驶和增强现实导航领域。
Mapbox Vison SDK for Android是一个直接跑在安卓设备上基于相机来解释道路场景的库。
主要特点如下:
1、分类和显示检测和报警标识
2、物体检测包括车辆、行人、路标、交通灯
3、对14种道路进行语义分类
4、增强现实导航的全覆盖
5、支持wifi或有限连接的相机
利用在智能手机和车载嵌入式硬件上运行的Vision SDK的开发人员将能够利用计算机视觉算法触发限速,行人,车辆和其他对象的AR警报。
并且,由于与微软的开源Azure IoT Edge运行时间集成,该SDK更具灵活性,并将这些数据集中在微软的认知服务中,并将其用于AI模型训练,审计和报告。
通过运行在Arm’s Object Detection处理器上的设备上的神经网络,Mapbox的Vision SDK可以实时从每秒60帧的高清摄像头中识别出物体。它不需要互联网连接,以便驾驶员在繁忙的十字路口行驶。
它利用机器学习模型来识别和理解路况信息,从而为用户提供实时导航提示、路标识别、行人检测等功能。
二.Vision SDK 有什么功能
Vision SDK 包含了 Vision、Vision AR、Vision Safety 这三个模块。这三个模块其实也是对应了三个 SDK。
1.Vision模块:
动态物体检测、图像语义分割、交通标识识别、车道识别
•Vision 模块使用机器学习的方式在移动设备中,对图片里的内容进行动态的物体检测和语义分割。此外,它可以识别图片中的交通标识符和车道等。
2.Vision AR模块:
AR车道,交通标识符
•Vision AR 以增强现实的方式将车道、交通标识符绘制在界面上。
3.Vision safety模块:
碰撞预警、超速提示
•Vision Safety 则是与安全驾驶相关,主要功能是碰撞预警和交通提示。
三.总体架构
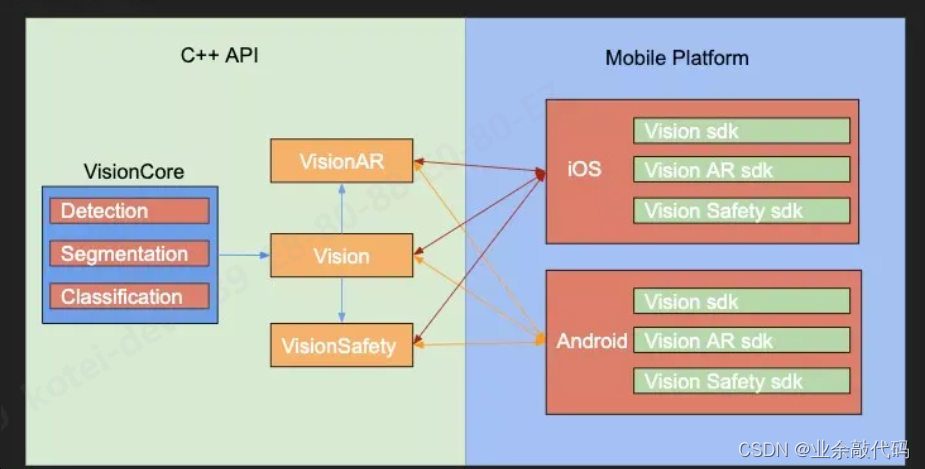
Vision Core
核心叫做 Vision Core,所有与机器学习相关的功能比如说语义检测、语义分割和物体识别等都是在 Vision Core 里实现的。
在 Vision Core 外面我们封装了 Vision 模块,Vision 模块会控制 Vision
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









