






ABB机器人视觉IP地址设置方法参考
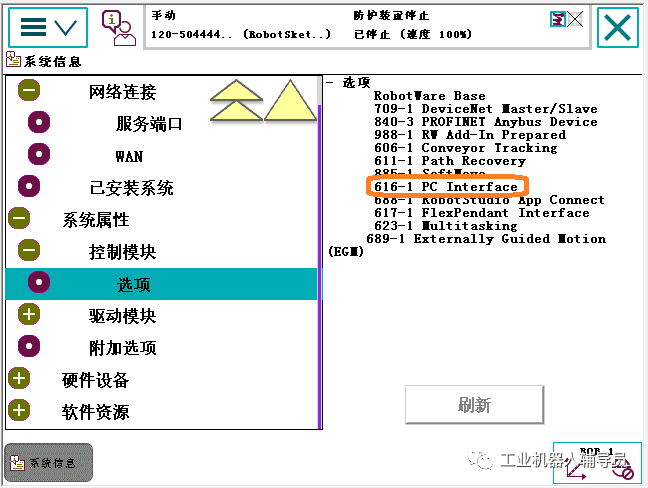
ABB机器人设备IP地址常规默认连接是192.168.125.1,与主机IP在同一网关即可连接,比如你的电脑或者其他设备可以写成192.168.125.2。连接需要机器人具有选项协议PC Interface功能。一般在选型时要进行考虑,后续也可以单独增加此选项。查看是否有这个选项在系统属性的控制模块点击选项即可。
关于视觉IP地址设置路径
在不同系统5版本和6版本中分别对应X启动和启动引导应用程序
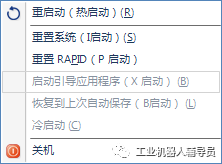
备注:虚拟机不支持X启动,启动类型大体如下
重置系统 | 系统恢复到出厂设置,对应5.X版本中的I启动 |
重置RAPID | 清除RAPID程序代码,对应5.X版本中的P启动 |
启动引导应用程序 | 进行系统IP设置及系统管理界面,对应5.X版本中的X启动 |
恢复到上次自动保存的状态 | 恢复到上次正常关机时的状态,对应5.X版本中的B启动 |
关闭主计算机 | 关闭主计算机,然后再关闭主电源,较为安全的关机方式 |
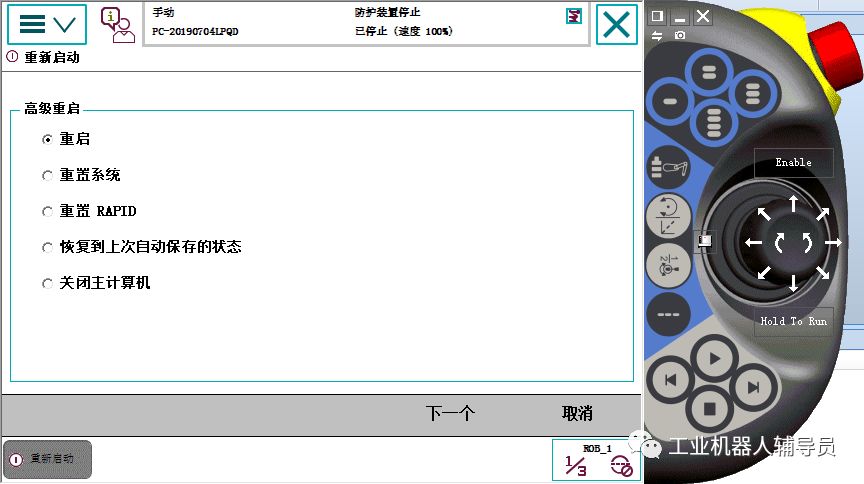
实际操作中选择启动引导应用程序或者X启动后进入系统设置界面

然后选择Setting进入IP设置界面,分为自动识别和自定义类型,类似电脑IP设置。
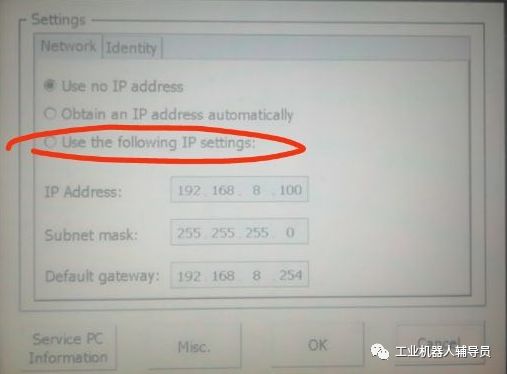
设置完成后进行验证。
更多信息
YAMAHA机器人故障视频案例(系统备份方法)
YAMAHA机器人E17故障排除案例参考
FANUC伺服焊枪压力标定参考
FANUC伺服焊枪零点标定参考
工业机器人伺服焊枪设置(FANUC详细完整)
工业机器人故障管理与预防性工作
ABB机器人码垛包位置调整参考
关于安川机器人平衡气缸故障现象
关于安川机器人平衡气缸维护要点参考
FANUC机器人故障 SRVO-062解除方法
FANUC机器人电机编码器分析(图解)
FANUC机器人负载手动设置方法参考
安川机器人并行IO分配 (查询)
工业机器人电气设计元件选取规则参考
安川电机与伺服放大器电路接线图
ABB机器人减速机漏油检漏测试
ABB机器人紧凑型控制柜内部结构(图)
KUKA机器人CCU板信号指示灯(从颜色判断状态)
工业机器人伺服电机故障分析

















 2251
2251

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









