





PS:由于我是新手,因此记录的比较罗里吧嗦,本文也属于一个没有任何技术的编程积累。
在SLAM系统中,经常需要从配置文件中读取参数文件,读取整型,浮点型都是比较常见的操作,在读取矩阵卡了一下,记录一下读取的注意事项。
为此我写了一个测试文件,下面是各个文件的内容。
1.CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8)
project(read_from_yaml)
set( CMAKE_CXX_FLAGS "-std=c++11 -march=native -O3" )
############### OpenCV dependencies ######################
find_package( OpenCV 3 REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
add_executable(read_yaml_mat read_yaml_mat_test.cpp)
target_link_libraries(read_yaml_mat ${OpenCV_LIBS})
2.c++主文件(read_yaml_mat_test.cpp)
//
// Created by weihao on 2020/6/3.
//
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
// Main function
int main(int argc, char** argv)
{
if(argc != 2)
{
cerr << endl << "Usage: ./read_yaml_mat path_to_settings" << endl;
return 1;
}
// read config file
cv::FileStorage file_settings(argv[1], cv::FileStorage::READ);
std::cout << "config file path: " << argv[1] << std::endl;
// read camera instrinc
int test_data = file_settings["test_data"];
std::cout << "test data :" << test_data << std::endl;
// read bool value
bool test_bool;
file_settings["test_bool"] >> test_bool;
std::cout << "test_bool :" << test_bool << std::endl;
// read OpenCV Mat
cv::Mat cam_k;
file_settings["cam_k"] >> cam_k;
std::cout << "camera instrinc matrix :" << std::endl << cam_k << std::endl;
return 0;
}3. 参数文件(read_mat.yaml)
%YAML:1.0
test_data: 10
test_bool: 0
cam_k: !!opencv-matrix
rows: 3
cols: 3
dt: u
data: [6, 2, 2, 2, 6, 2, 2, 2, 6]重点:
- 矩阵读取时代码不能写成如下形式(类型无法转换,无法编译)
cv::Mat cam_k = file_settings["cam_k"]2. 读取bool变量时代码也不能写成如下形式,同时要注意参数文件中bool变量用0/1表示,不能用true/false(true/false都会返回1)
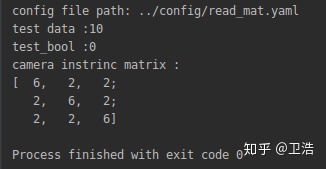
bool data_bool = file_settings["test_bool"]最后放一下运行结果:















 2919
2919











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









